

2 Проектирование система автоматического регулирования скорости

Рисунок 5 – Структурная схема двухконтурной системы регулирования скорости
Объектом управления для контура тока является электрическая часть двигателя, которая описывается звеном первого порядка:
Передаточная функция тиристорного преобразователя:

где
 – коэффициент тиристорного преобразователя,
который находится по формуле
– коэффициент тиристорного преобразователя,
который находится по формуле ,
, ;
;
 –постоянная
времени тиристорного преобразователя,
равная малой некомпенсируемой постоянной
времени
–постоянная
времени тиристорного преобразователя,
равная малой некомпенсируемой постоянной
времени
 :
: с.
с.
Произведем настройку контура тока на модульный оптимум с учетом обратной связи по ЭДС двигателя.
Передаточная функция разомкнутого контура тока:

Желаемая передаточная функция разомкнутого оптимизированного контура тока:
Приравняв
 и
и ,
и выразив из равенства
,
и выразив из равенства ,
получим:
,
получим:

 Произведем
настройку контура скорости на модульный
оптимум.
Произведем
настройку контура скорости на модульный
оптимум.
Передаточная функция разомкнутого контура скорости:

Желаемая передаточная функция разомкнутого оптимизированного контура скорости:

Приравняв
 и
и ,
и выразив из равенства
,
и выразив из равенства ,
получим:
,
получим:

Где
 ,
, .
.
3 Графики переходных процессов двухконтурной системы регулирования скорости

Рисунок
6 – Реакция контура тока на скачок
единичного ступенчатого сигнала U
= 1В, наброс нагрузки
 в момент времениt
= 0,4c,
съем нагрузки в момент времени t
= 0,8 c
в момент времениt
= 0,4c,
съем нагрузки в момент времени t
= 0,8 c

 Рисунок
7 – Реакция управляющего сигнала на
скачок единичного ступенчатого сигнала
U
= 1В, наброс нагрузки
Рисунок
7 – Реакция управляющего сигнала на
скачок единичного ступенчатого сигнала
U
= 1В, наброс нагрузки
 в момент времениt
= 0,4c,
съем нагрузки в момент времени t
= 0,8 c
в момент времениt
= 0,4c,
съем нагрузки в момент времени t
= 0,8 c

Рисунок
8 – Реакция контура скорости на скачок
единичного ступенчатого сигнала U
= 1В, наброс нагрузки
 в момент времениt
= 0,4c,
съем нагрузки в момент времени t
= 0,8 c
в момент времениt
= 0,4c,
съем нагрузки в момент времени t
= 0,8 c
Получим
графики реакции на синусоидальное
воздействие
 :
:

 Рисунок
9 – Реакция контура тока на синусоидальное
воздействие
Рисунок
9 – Реакция контура тока на синусоидальное
воздействие
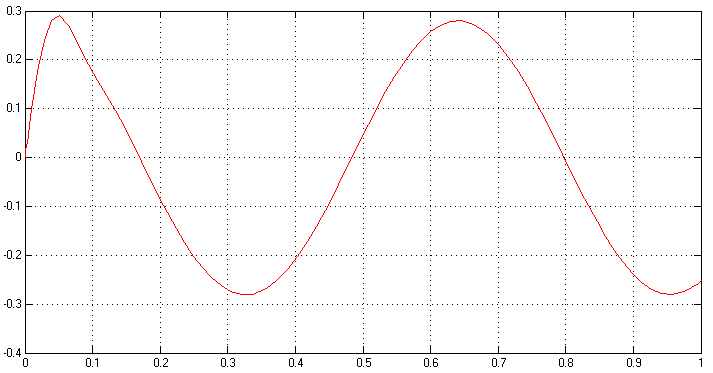
Рисунок 10 – Реакция управляющего сигнала на синусоидальное
воздействие

 Рисунок
11 – Реакция контура скорости на
синусоидальное воздействие
Рисунок
11 – Реакция контура скорости на
синусоидальное воздействие
 4
Определение перерегулирования в системе
автоматического регулирования
скорости, времени переходных процессов,
среднеквадратичной ошибки
регулирования по скорости в случае
работы системы в номинальном режиме
4
Определение перерегулирования в системе
автоматического регулирования
скорости, времени переходных процессов,
среднеквадратичной ошибки
регулирования по скорости в случае
работы системы в номинальном режиме
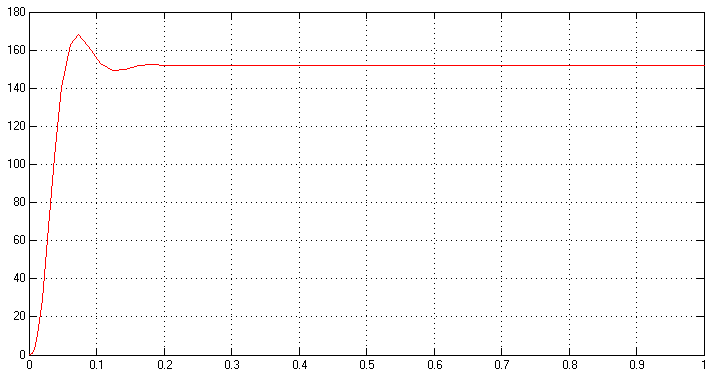
Рисунок 12 – Реакция контура скорости на скачок управляющего воздействия
U = 10В.
Перерегулирование:

Время
регулирования:
 с
с
5 Проектирование системы автоматического регулирования положения

Рисунок 13 – Структурная схема системы автоматического регулирования положения
Произведем настройку контура положения на симметричный оптимум.
Передаточная функция разомкнутого контура положения:

Желаемая передаточная функция разомкнутого оптимизированного контура скорости:

Приравняв
 и
и ,
и выразив из равенства
,
и выразив из равенства получим:
получим:

6 Графики переходных процессов трехконтурной системы регулирования положения

Рисунок 14 – Реакция всей системы на управляющее воздействие U = 1 В, наброс нагрузки t = 0,4 c, съем нагрузки t = 0,6 c.
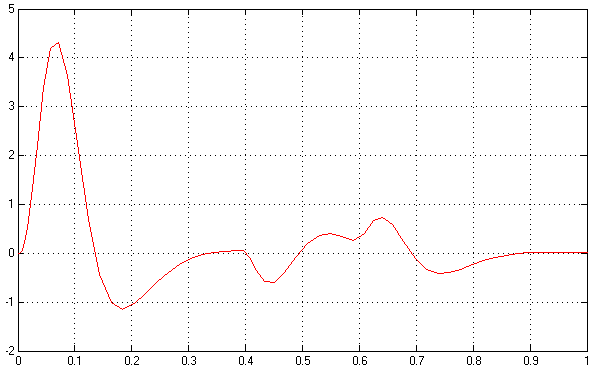
Рисунок 15 – Реакция контура скорости на управляющее воздействие
 U
= 1 В, наброс нагрузки t
= 0,4 c,
съем нагрузки t
= 0,6 c.
U
= 1 В, наброс нагрузки t
= 0,4 c,
съем нагрузки t
= 0,6 c.

Рисунок 16 – Реакция контура тока на управляющее воздействие U = 1 В, наброс нагрузки t = 0,4 c, съем нагрузки t = 0,6 c.

Рисунок 17 – Изменение сигнала управления скоростью при скачке управляющего воздействия U = 1 В, наброс нагрузки t = 0,4 c, съем нагрузки t = 0,6 c.

 Рисунок
18 – Изменение сигнала управления
положением при скачке управляющего
воздействия U
= 1 В, наброс нагрузки t
= 0,4 c,
съем нагрузки t
= 0,6 c.
Рисунок
18 – Изменение сигнала управления
положением при скачке управляющего
воздействия U
= 1 В, наброс нагрузки t
= 0,4 c,
съем нагрузки t
= 0,6 c.
Получим
графики реакции на синусоидальное
воздействие
 :
:

Рисунок 19 – Реакция всей системы на синусоидальное управляющее воздействие, наброс нагрузки t = 0,4 c, съем нагрузки t = 0,6 c.

 Рисунок
20 - Реакция контура скорости на
синусоидальное управляющее воздействие,
наброс нагрузки t
= 0,4 c,
съем нагрузки t
= 0,6 c.
Рисунок
20 - Реакция контура скорости на
синусоидальное управляющее воздействие,
наброс нагрузки t
= 0,4 c,
съем нагрузки t
= 0,6 c.

Рисунок 21 – Реакция контура тока на синусоидальное управляющее воздействие, наброс нагрузки t = 0,4 c, съем нагрузки t = 0,6 c.

 Рисунок
22 – Изменение сигнала управления
скоростью при синусоидальном управляющем
воздействии, наброс нагрузки t
= 0,4 c,
съем нагрузки t
= 0,6 c.
Рисунок
22 – Изменение сигнала управления
скоростью при синусоидальном управляющем
воздействии, наброс нагрузки t
= 0,4 c,
съем нагрузки t
= 0,6 c.

Рисунок 23 – Изменение сигнала управления положением при синусоидальном управляющем воздействии, наброс нагрузки t = 0,4 c, съем нагрузки t = 0,6 c.
 7
Определение перерегулирования в системе
автоматического регулирования
положения, времени переходных процессов,
среднеквадратичной ошибки
регулирования по скорости в случае
работы системы в номинальном режиме
7
Определение перерегулирования в системе
автоматического регулирования
положения, времени переходных процессов,
среднеквадратичной ошибки
регулирования по скорости в случае
работы системы в номинальном режиме

Рисунок 24 – Реакция контура положения на скачок управляющего воздействия U = 10В.
Перерегулирование:

Время
регулирования:
 с
с