

1 Исследовательский раздел
1.1 Постановка задачи экстремального управления
Задачей всякого управления являются организация и реализация целенаправленного воздействия на объект управления. Управление представляет собой процесс изыскания и реализации мер по переводу объекта в желаемое состояние.
Понятие управления связано с такими исходными понятиями, как «объект управления», «воздействие» и «цель».
Под объектом управления мы будем понимать часть окружающего нас мира (среды), выделенную таким образом, что выполняются по крайней мере два условия:
на объект можно воздействовать;
это воздействие в принципе может приблизить нас к осуществлению поставленных целей в объекте, т.е. изменить его состояние в желательном направлении.

Рисунок 1.1- Объект управления и его взаимодействие со средой и управлением
На рисунке 1.1 показано схематическое изображение объекта. Здесь X- канал воздействия среды на объект, Y - канал воздействия объекта на среду, U - канал воздействия управления на объект.
Таким образом, первым и весьма существенным этапом всякого управления является выделение объекта и выявление каналов взаимных воздействий X, Y и U.
Далее следует отметить, что понятие «воздействие» при решении задач управления рассматривается лишь (и только) в информационном смысле. Это значит, что с точки зрения управления воздействие имеет сугубо информационный характер.
Выделение объекта управления и выявление каналов воздействий сами по себе произойти не могут. Это выделение может (и должно) производиться только с точки зрения заданной цели управления. Под целью управления здесь подразумевается совокупность условий, свойств и требований, которым должен удовлетворять объект. Таким образом, объект управления и каналы его взаимодействия со средой целиком и полностью определяются целями управления.
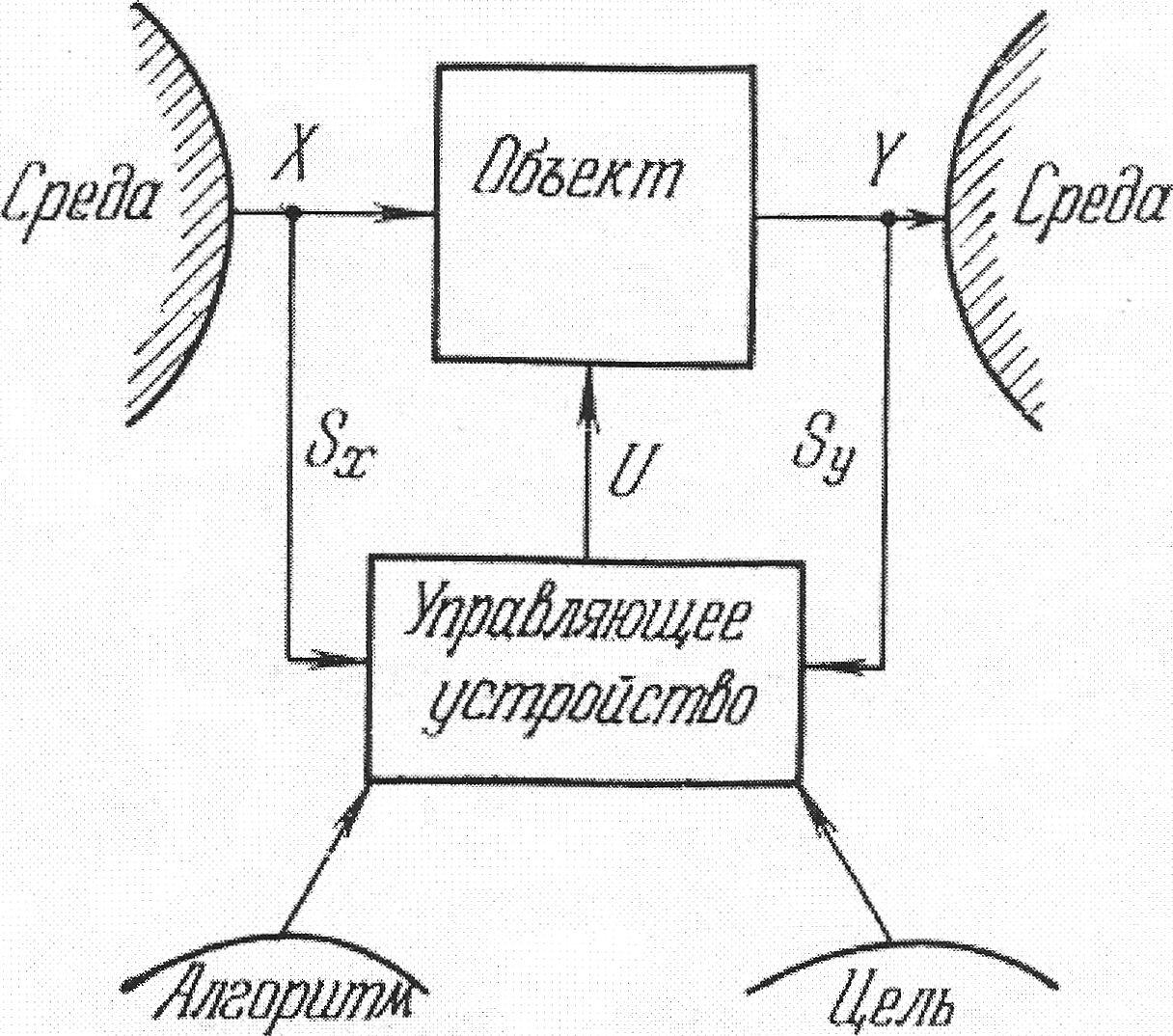
Рисунок 1.2 - Блок-схема системы управления и ее взаимодействие со средой
Как сказано выше, процесс управления является процессом организации, т.е. реализации целенаправленного воздействия на объект. Однако сам процесс организации также целенаправлен. Он подразумевает наличие умения, способности создать целенаправленное воздействие. Эти свойства и определяют алгоритм управления. Под алгоритмом управления подразумевается совокупность правил, методов и способов, позволяющих образовать (синтезировать) целенаправленное воздействие (управление), коль скоро известно действительное состояние объекта управления. Проще говоря, алгоритм управления является инструкцией о том, как добиться целей управления в различных ситуациях.
Теперь объединим объект управления и управляющее устройство, реализующее алгоритм управления, в систему управления. Будем называть системой управления такую совокупность объекта управления и управляющего устройства, процесс взаимодействия которых приводит к выполнению поставленной цели управления (рисунок 1.2).
Цель экстремального управления состоит в обеспечении оптимального, наилучшего в некотором смысле, статического режима работы объекта. Основным критерием оптимальности является обеспечение минимума или максимума заданной функции качества работы объекта при недостаточной априорной информации о характере ее изменений.
В качестве априорной информации в худшем случае может выступать только знание того, что функция качества имеет экстремум. При этом ни количество экстремумов, ни их положение, ни аналитическое выражение функции качества не известно.
Таким образом, до опыта известно, что в фазовом пространстве существует некоторая изменяющаяся во времени (дрейфующая) поверхность y = f(xl,x2,...,xn,t), определяемая некоторой функцией качества и имеющая один или несколько экстремумов. Экстремальная поверхность ограничена, так как всегда ограничены координаты х1,х2,...,хп.
Система экстремального управления должна вывести и удержать рабочую точку в глобальном экстремуме (maximum maximorum или minimum minimorum).
 Рисунок
1.3 - Дрейф экстремальных характеристик
объекта: а - по вертикали; б - по горизонтали
и вертикали
Рисунок
1.3 - Дрейф экстремальных характеристик
объекта: а - по вертикали; б - по горизонтали
и вертикали
Для простоты рассмотрим не экстремальную поверхность, а экстремальную линию (рисунок 1.3). Под действием различных возмущающих воздействий экстремальная линия может смещаться или, как принято говорить, дрейфовать. При этом возможны два случая: экстремум дрейфует по вертикали с искажением или без искажения формы (рисунок 1.3 - а), экстремум смещается и по вертикали, и по горизонтали (рисунок 1.3 - б).
Если по оси ординат откладывается величина, характеризующая качество работы системы, то естественно желание работать в районе экстремума. В первом случае для этого достаточно каким-либо образом (аналитически или экспериментально) один раз определить положение экстремума, а затем использовать систему стабилизации. Во втором случае необходимо следить за экстремумом. Если закон дрейфа известен, то может быть использована следящая система или система программного управления. При неизвестном законе дрейфа обе системы оказываются неспособными обеспечить цель управления и требуется
специальная экстремальная система.
Следовательно, системы экстремального управления предназначены для стабилизации координат х1,х2,...,хп, объекта управления относительно наперед неизвестных значении хх =х1э,х2 =х2э,...,хп = хпэ, соответствующих экстремальному значению функции у = f(xl,x2,...,xn).
Допустим, что в некоторый момент времени рабочая точка объекта А (рисунок 1.4) определялась координатами ха,уа и находилась в экстремуме. Возмущающие воздействия скачком сместили экстремальную характеристику в новое положение. В результате состояние объекта характеризуется точкой В с координатами хв,ув .Точка В находится между двумя экстремумами. При случайном выборе направления она может прийти в минимум или в максимум. И то и другое положение соответствует экстремальному значению функции.
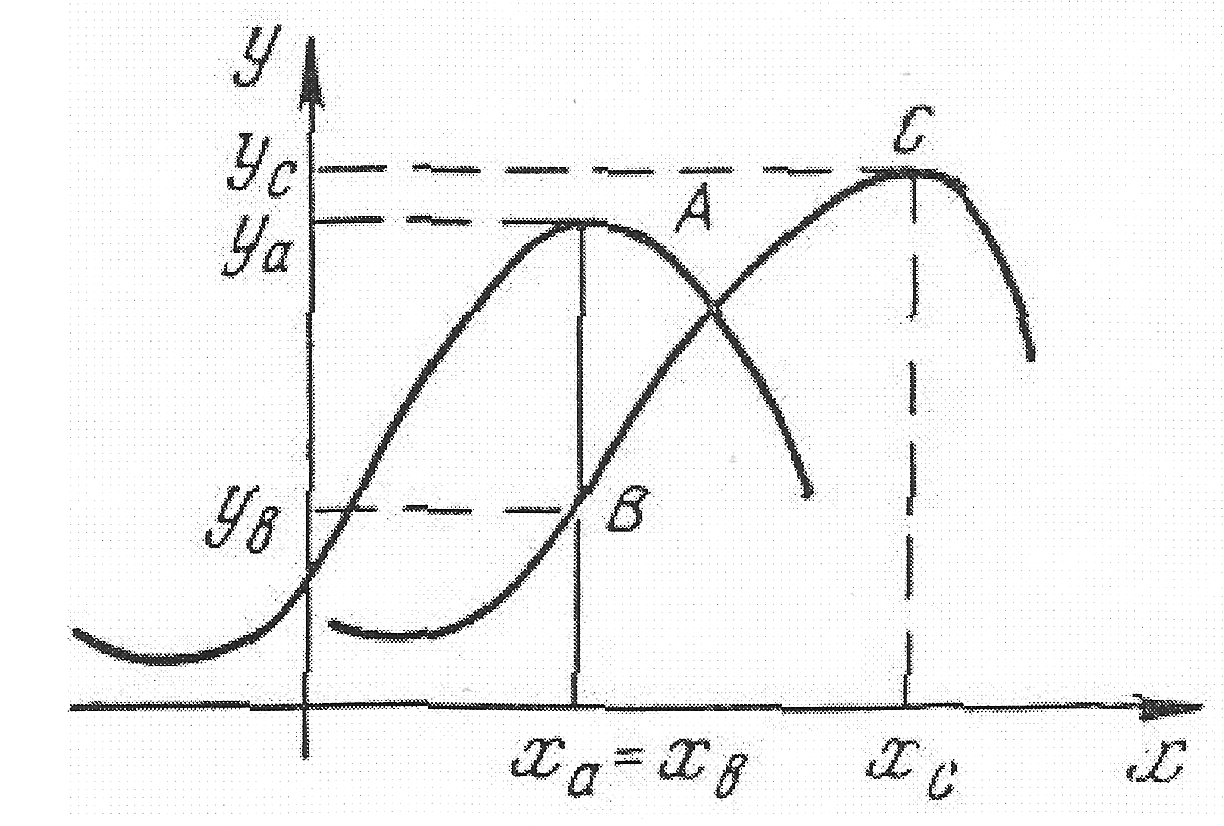
Рисунок 1.4 - Движение СЭР при скачкообразном смещении характеристики
Очевидно, что для правильной работы экстремальной системы необходимо задать вид требуемого экстремума. Предположим, что необходимо поддерживать максимум выходной координаты. Тогда экстремальный регулятор должен определить направление движения к максимуму и организовать это движение. Определив, что рабочая точка пришла в экстремум (точку С), регулятор должен удержать ее в этом режиме.
Таким образом, задачей экстремального регулятора является поиск значений х1э,х2э,...,хnэ , организация движения координат х1,х2,...,хn к экстремальным
значениям и удержание их в экстремальной рабочей точке.
Стабилизация объекта в экстремуме по существу сводится к многократному повторению решения двух первых задач - определению экстремальных значений и организации движения к ним.