

ВВЕДЕНИЕ
В данной работе представлен пневмопривод, управление которым осуществляется при помощи дискретных распределителей. На базе пневмопривода создана система позиционирования каретки пневмоцилиндра. Наиболее лучшими системами позиционирования являются сервопневматические системы управления и системы с пропорциональными распределителями. Сервопривод (следящий привод) — привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Являясь наиболее эффективными, они имеют некоторые недостатки. Главным из которых, является высокая стоимость.
С целью удешевления системы основной задачей данной работы является разработка нескольких алгоритмов точного позиционирования, которые смогут полностью заменить сервопривод. Главное требование к предъявляемой работе обеспечить максимальную скорость и точность позиционирования.
Создание алгоритмов управления будет выполнено в среде разработки Simatic Step 7. Будет произведено анализ и сравнение алгоритмов, будут выявлены недостатки и плюсы каждого из них, и также будут написаны рекомендации по применению каждого алгоритма, в зависимости от поставленной задачи.
Описание элементов и принцип работы стенда
1.1Описание элементов стенда

Рис 1.Стенд
В состав стенда входят: контроллер Siemens S7-300, интерфейсный модуль, блок питания на 24VDC, пневматический линейный привод, дискретные распределители, потенциометр, блок подготовки воздуха, монтажные рейки, кабеля, коробы для проводов. Все элементы закреплены на алюминиевой платформе при помощи т-образных винтов.
Для управления всей системой используется контроллер марки SIEMENS (Рис 1.1). В стенде используется контроллер типа SIMATIC S7-300 - модульный программируемый контроллер:
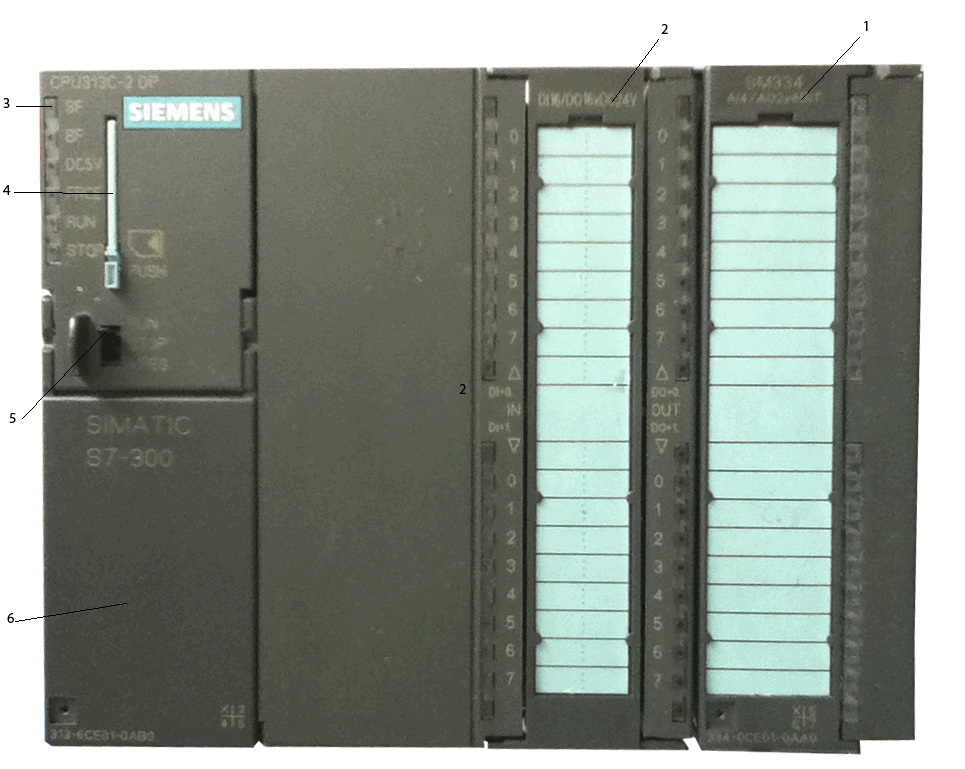
Рис 1.1 Simatic s7-300
модуль дискретного ввода/вывода; 2 модуль дискретного и аналогового ввода/вывода; 3 светодиодные индикаторы; 4 карта памяти MMC; 5 переключатель режимом работы; 6 процессорный модуль.
Используемый контроллер представляет собой процессорный модуль CPU313C-2DP с интегрированными модулями ввода/вывода аналоговых и дискретных сигналов, следующей конфигурации:
24 дискретных входов;
16 дискретных выходов;
4 аналоговых входов;
2 аналоговых выходов;
32 Кбайт памяти программ;
Для электрического питания контроллера используется источник постоянного тока +24В (Рис 1.2).

Рис 1.2 Источник постоянного тока на 24 VDC
Программа контроллера храниться на внешней карте памяти типа ММС (Micro Memory Card). Дискретные входы/выходы работают с сигналами, уровень которых лежит в диапазоне 0..30В.
К контроллеру по многожильному проводу сигналы управления с контроллера передаются на клеммы выходных сигналов интерфейсного модуля (Рис 1.3).. Таким же образом осуществляется передача сигналов в контроллер.

Рис 1.3 Интерфейсный модуль на 50 каналов
Интерфейсный модуль на 50 каналов с винтовыми зажимами, устанавливающийся на монтажную рейку. К клеммам выходных сигналов подключаются распределительные устройства. В данном случае к клеммам подключены пневматические распределители. В качестве исполнительного устройства используется линейный привод серии DGPL, максимальное рабочее давление 8 bar. Полная маркировка привода: DGPL-25-450-PPV-A-B-KF-SH (Рис 1.4).

Рис 1.4 Линейный привод серии DGP
Подача сжатого воздуха в рабочие полости привода производится с помощью дискретных распределителей типа 3/2 серии MSZD-3 на питание 24 V DC фирмы Festo (Рис 1.5).

Рис 1.5 Пневматический дискретный распределитель
Подача воздуха в систему происходит через фильтр-регулятор/маслораспылитель (блок подготовки воздуха) (Рис 1.6). Рабочее давление 0,5..7 бар. Стандартный номинальный расход 90 л/мин. С ручным отводом конденсата.
|

Отслеживание положения каретки линейного бесштокового пневмоцилиндра происходит при помощи датчика перемещения MLO-POT-TLF. С длиной хода 500мм. Аналоговый принцип измерения. Разрешение 0.01 мм (Рис 1.7).

Рис 1.7 датчика перемещения MLO-POT-TLF
механически - жестко связанного с кареткой цилиндра. Посредством датчика перемещения отслеживается изначальное положение каретки.
Питание потенциометра осуществляется от аналогового модуля контроллера SM334.

Информация через компьютер с помощью программного обеспечения SIMATIC MANAGER STEP7. Далее информация через программатор заливается в память контроллера. Дальше данные по многожильные проводам поступают в интерфейсные модули, которые и посылают необходимые сигналы.
STEP7
Контроллер
SIMATIK S7-300


Стенд
Рис. 1.9. Функциональная схема