

книги2 / 75
.pdfPERSPECTIVESCIENTIFICRESEARCH:EXPERIENCE,PROBLEMSANDDEVELOPMENTPROSPECTS
Вариабельность этих изменений имеет ограничения и носит, как правило, функциональный характер.
Как показывают многочисленные исследования, функциональная реабилитация пациентов, включающая лечебную физическую культуру и физиотерапию, после хирургической реконструкции стабилизирующего аппарата позволяет купировать болевой синдром и активизировать пациентов в послеоперационном периоде. Тем не менее, большинство пациентов в отсутствии тренировок сохраняют жалобы на затруднение при ходьбе, что связано с атрофией мышц и нарушениями биомеханики. При инструментальных исследованиях обнаруживаются глубокие нарушения регионарного кровообращения нижних конечностей в сочетании с изменениями электрофизиологической активности мышц, что негативно сказывается на сроках нетрудоспособности. Отсюда использование тренажёра для реабилитации после повреждения коленного сустава может внести значимый вклад в улучшение качества жизни пациентов и снизить показатель нетрудоспособности.
Цель рассматриваемой работы заключается в изучении и сравнительном анализе тренажёров для реабилитации после травм коленного и тазобедренного сустава.
Материалы и методы исследования. Оценка характеристик проверялась путём сравнения технических показателей тренажёров.
За последнее десятилетие было разработано несколько реабилитационных тренажёров для восстановления подвижности пораженных конечностей. Эти системы можно сгруппировать в соответствии с принципом реабилитации, которому они следуют:
1)тренажеры «беговая дорожка»;
2)тренажеры для ходьбы на основе пластин для ног;
3)наземные тренажеры для ходьбы;
4)стационарные беговые тренажеры;
5)системы реабилитации голеностопного сустава;
6)стационарные системы;
7)активные ортезы стопы.
В данной работе мы используем дополнительную классификацию реабилитационных роботов. В частности, мы классифицируем в соответствии с режимом их работы, в отличие от
INTERNATIONALSCIENTIFICANDPRACTICALCONFERENCE |
| WWW.PERVIY-VESTNIK.RU |
~ 110 ~

ПЕРСПЕКТИВНЫЕНАУЧНЫЕИССЛЕДОВАНИЯ:ОПЫТ,ПРОБЛЕМЫИПЕРСПЕКТИВЫРАЗВИТИЯ
классической классификации, основанной на их кинематике. Следовательно, мы рассматриваем следующие три категории:
1.Тренажёры непрерывного пассивного движения (CPM).
2.Терапевтические тренажёры (TEM).
3.Активно-пассивные тренажёры для верхних и нижних конечностей.
4.Тренажёры для тренировки ходьбы.
Тренажёры непрерывного пассивного движения (CPM)
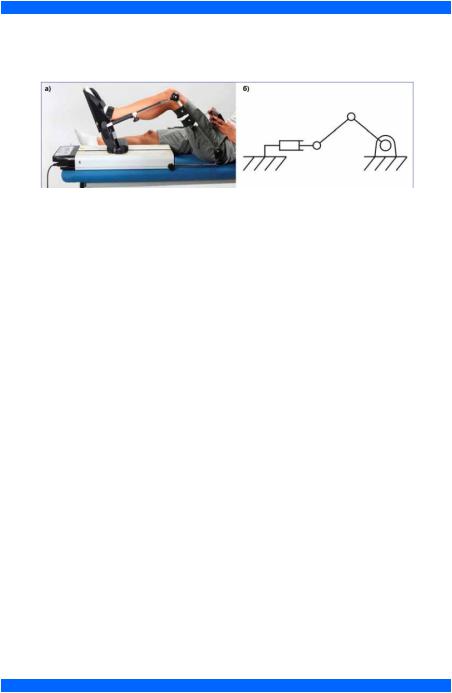
Концепция CPM была введена в 1970 году Робертом Б. Солтером для реабилитации после реконструктивных операций на суставах, таких как замена коленного сустава и реконструкция передней крестообразной связки. В 1978 году в сотрудничестве с инженером Джоном Сарингером было разработано первое устройство CMP. С тех пор использование машин CPM (например, FISIOTEK 3000 TSF, рис. 1а) получило распространение в реабилитационных центрах и больницах для лечения после операций на колене и в настоящее время является наиболее используемым реабилитационным устройством для нижних конечностей [2]. Устройства CPM представляют собой семейство систем эффекторных систем с фиксированной базой, которые управляются одним двигателем с переменным диапазоном скорости и движения. Обычно они не программируются и управляются в разомкнутом контуре без какойлибо обратной связи по усилию или положению. С кинематической точки зрения СРМ можно описать как двухстержневую систему (рис. 1б), работающую в двухмерном плане и сочленяющуюся в тазобедренном, коленном и голеностопном суставах, каждый из которых рассматривается как шарнирный сустав. Сила создается роботом на ноге пациента. Как следствие, CPM может обеспечить движение только в одной плоскости, обычно в сагиттальной плоскости [3]. Устройства CPM постоянно перемещают коленный сустав в заданном диапазоне движений. На протяжении всей реабилитации. этот диапазон движений обычно увеличивается с течением времени с целью увеличения подвижности суставов. Одним из основных ограничений CPM является то, что, как следует из названия, они являются пассивными машинами, то есть они не требуют от пользователя приложения какой-либо силы во время движения. Как следствие, пациент не может активно двигать ногой на
МЕЖДУНАРОДНАЯНАУЧНО-ПРАКТИЧЕСКАЯКОНФЕРЕНЦИЯ | НИЦВЕСТНИКНАУКИ | WWW.PERVIY-VESTNIK.RU
~ 111 ~
PERSPECTIVESCIENTIFICRESEARCH:EXPERIENCE,PROBLEMSANDDEVELOPMENTPROSPECTS
тренажере СРМ. Более того, устройство двигает колено только при сгибании/разгибании.
Рисунок 1 – FISIOTEK 3000 TSF
Ради улучшения выздоровления были разработаны другие машины, направленные на повышение активности пациента в процессе реабилитации.
Терапевтические тренажёры (TEM)
В 1988 году первым шагом в этом направлении стала разработка BioDex. Этот тренажёр представляет собой программируемое одноосное устройство с принудительным управлением для упражнений и реабилитации мышц, которое состоит из подвижного приспособления, к которому можно приложить действующую силу. Этот аппарат был разработан для лечения повреждений мышц и крестообразных связок [4]. В 2001 г. Мугамир и соавт. предложил управляемый компьютером тренажер для тренировки и реабилитации нижних конечностей под названием Multi-Iso. Он представляет собой стационарный тренажер, состоящий из кресла и подвижной части, шарнирно соединенной в коленном суставе с помощью одного соединения. Во время упражнений пациент остается в сидячем положении, а его нога зажимается в области лодыжки и бедра. Благодаря шести двигателям положение сиденья может быть адаптировано вручную или автоматически к сохраненному в памяти положению, чтобы соответствовать требованиям и морфологии каждого пользователя. Iso может выполнять семь различных режимов тренировок (изокинетический, рулевой, изометрический, изотонический, физиокинетический, растяжка и вспомогательный). Для выполнения необходимых моделей движения для каждой конкретной тренировочной программы Multi-Iso может использовать три различных возможных параметра
INTERNATIONALSCIENTIFICANDPRACTICALCONFERENCE |
| WWW.PERVIY-VESTNIK.RU |
~ 112 ~

ПЕРСПЕКТИВНЫЕНАУЧНЫЕИССЛЕДОВАНИЯ:ОПЫТ,ПРОБЛЕМЫИПЕРСПЕКТИВЫРАЗВИТИЯ
(положение, скорость и сила) с использованием разных последовательностей. Такие последовательности зависят от характера упражнений, углового положения колена при сгибании-разгибании и силы сопротивления пациента. «Сила» используется для имитации переменной механической нагрузки. «Позиция» используется, когда пациенту необходимо приложить максимальное усилие вокруг фиксированного количества позиций, определенных физиотерапевтом. «Скорость» в основном используется во время изокинетических и рулевых тренировок или в режимах реабилитации, чтобы гарантировать постоянную скорость без статической ошибки
(рис. 2) [5].
Рисунок 2 – BioDex
Активно-пассивные тренажёры для верхних и нижних конечностей
Предназначены для сочетания упражнений в активном (с использованием двигательных навыков и способностей пациента) и пассивном (за счет энергии движущихся элементов тренажера) режимах. К показаниям относится восстановление после травм или инсультов. Активно-пассивные реабилитационные тренажеры используются также для лечения пациентов с заболеваниями суставов, мышечной слабостью, расстройством координации. Аппараты способствуют нормализации кровообращения, улучшению координации и способности поддерживать равновесие. Такие
МЕЖДУНАРОДНАЯНАУЧНО-ПРАКТИЧЕСКАЯКОНФЕРЕНЦИЯ | НИЦВЕСТНИКНАУКИ | WWW.PERVIY-VESTNIK.RU
~ 113 ~

PERSPECTIVESCIENTIFICRESEARCH:EXPERIENCE,PROBLEMSANDDEVELOPMENTPROSPECTS
тренажеры могут напоминать, например, велосипед или беговую дорожку. THERA-Trainer Tigo подходит для активно-пассивной реабилитации нижних конечностей и реабилитации верхних конечностей. Согласно заявлениям производителя, аппарат устанавливает инновационные технологические стандарты. С его помощью можно осуществлять тренировки ослабленных мышц и уменьшать спастику, улучшать кровообращение в конечностях, налаживать работу кишечника и мочевого пузыря. В целом этот реабилитационный тренажер для рук и ног позволяет пациенту значительно улучшить функциональное состояние тела. В процессе тренировки контролируются время сеанса, скорость вращения педалей, степень нагрузки, симметричность, а также важные показатели жизнедеятельности – пульс, спастика, расход калорий. При этом у аппарата довольно понятное управление: все настройки выведены на экран, их регулировка осуществляется при помощи сенсорного дисплея. Специальное программное обеспечение THERASoft позволяет контролировать тренировки, отслеживать достижения
(рис. 3).
Рисунок 3 – THERA-Trainer Tigo
Тренажёры для тренировки ходьбы
Тренажер ходьбы GT-I производится компанией Reha-Stim, Берлин, Германия. Это конструкция с фиксированным основанием, состоящая из верхней привязи, разгружающей вес тела пациента, и двух подножек, приводимых в действие механизмами с независимым
INTERNATIONALSCIENTIFICANDPRACTICALCONFERENCE |
| WWW.PERVIY-VESTNIK.RU |
~ 114 ~
ПЕРСПЕКТИВНЫЕНАУЧНЫЕИССЛЕДОВАНИЯ:ОПЫТ,ПРОБЛЕМЫИПЕРСПЕКТИВЫРАЗВИТИЯ
приводом, которые перемещают ступни по фиксированной траектории, напоминающей походку, с двойной кривошипной и качающейся системой. Позиционирование пациента осуществляется с помощью встроенного поворотного устройства, его стопы фиксируются на опорных пластинах и прикрепляются проволочные крепления для компенсации бокового смещения тела. Систему можно настроить в соответствии с физическими характеристиками пациента, например, длину шага можно отрегулировать путем переключения передач [6]. Во время терапии поддерживаются горизонтальные и вертикальные движения туловища пациента в соответствии с фазой ходьбы. Между тем, встроенный сервопривод поддерживает собственные усилия пациента, чтобы поддерживать постоянную скорость вращения, подобно тому, как это происходит в эллипсоидальном велосипеде. Основная особенность Gait Trainer GT-I заключается в том, что он позволяет субъектам с тяжелыми нарушениями повторять движения, напоминающие походку (рис. 4).
Рисунок 4 – Gait Trainer GT-I
МЕЖДУНАРОДНАЯНАУЧНО-ПРАКТИЧЕСКАЯКОНФЕРЕНЦИЯ | НИЦВЕСТНИКНАУКИ | WWW.PERVIY-VESTNIK.RU
~ 115 ~

PERSPECTIVESCIENTIFICRESEARCH:EXPERIENCE,PROBLEMSANDDEVELOPMENTPROSPECTS
Заключение
Реабилитационная робототехника является междисциплинарной и многофакторной областью, включающей сочетание компетенций. Помимо глубоких знаний в области робототехники, исследования и разработки в области роботизированных реабилитационных устройств требуют глубокого понимания биомеханики человеческого тела, а также неврологических и когнитивных систем человека. Реабилитационные роботы, разработанные с недостаточным знанием движений суставов, могут затруднить процесс реабилитации или даже повредить суставы человека. Разработка подобной техники требует учета физиологической кинематики биосуставов. В перспективе реабилитационные мероприятия с применением роботизированных тренажеров будут иметь реальные преимущества, дополняя традиционную практику использования физиолечения и лечебной физкультуры, что сократит время, затрачиваемое на процесс реабилитации и сократит интервалы нетрудоспособности граждан после травм.
Список литературы
[1]Федеральная служба государственной статистики: официальный сайт. – Москва. [Электронный ресурс]. – URL: https://rosstat.gov.ru/storage/mediabank/Zdravoohran-2021.pdf. (дата обращения: 10.10.22).
[2]Клиническое применение фундаментальных исследований непрерывного пассивного движения при нарушениях и травмах синовиальных суставов: предварительный отчет о техникоэкономическом обосновании. / Р.Б. Солтер, Х.В. Гамильтон, Дж.Х. Ведж, М. Тайл, И.П. Тороде, С.В. О'Дрисколл и другие. // Журнал ортопедических исследований. – 1983. № 1(3). 325-342 с.
[3]Марко М. Реабилитационная робототехника. / М. Марко, Б. Тадей // Технология и здравоохранение. – 2011. №(6). 483-495 с.
[4]Krukowski R. Упражнение и реабилитационный аппарат для мышц торможения частиц. / R. Krukowski – 4765315, 1988. с. 12.
[5]Мугамир С., Манаманни Н., Зайтун Дж., Афилал Л. Реализация закона управления для Multi-Iso: тренировочная машина
INTERNATIONALSCIENTIFICANDPRACTICALCONFERENCE |
| WWW.PERVIY-VESTNIK.RU |
~ 116 ~

ПЕРСПЕКТИВНЫЕНАУЧНЫЕИССЛЕДОВАНИЯ:ОПЫТ,ПРОБЛЕМЫИПЕРСПЕКТИВЫРАЗВИТИЯ
для нижних конечностей. Материалы 23-й ежегодной международной конференции IEEE Engineering in Medicine and Biology Society. Стамбул, Турция: IEEE; 2001 [цитировано 16 февраля 2019 г.]. п.
1477-80. |
[Электронный |
ресурс]. |
– |
URL: |
https://ieeexplore.ieee.org/document/1020484. |
(дата |
обращения: |
||
11.10.22).
[6] Гессе С. Механизированный тренажер для восстановления походки. / С. Гессе, Д. Уленброк // J Rehabil Res Dev. – 2000. № 37 (6). 701-708 с.
© А.Г. Цыганова, Ю.Р. Агапова, 2022
МЕЖДУНАРОДНАЯНАУЧНО-ПРАКТИЧЕСКАЯКОНФЕРЕНЦИЯ | НИЦВЕСТНИКНАУКИ | WWW.PERVIY-VESTNIK.RU
~ 117 ~

PERSPECTIVESCIENTIFICRESEARCH:EXPERIENCE,PROBLEMSANDDEVELOPMENTPROSPECTS
УДК 624.131.34
АНАЛИТИЧЕСКИЙ ОБЗОР ЭФФЕКТИВНОСТИ БУРЕНИЯ С ПРИМЕНЕНИЕМ ДРУ
Д.А. Гилев,
магистрант, Уфимский Государственный Нефтяной Технический Университет, г. Уфа
Аннотация: В статье рассмотрена эффективность технологий бурения скважин с применением винтового забойного двигателя и его рабочие органы.
Ключевые слова: забойный двигатель, статор, ротор, бурение
Эффективность технологии бурения скважины определяется тем, насколько рационально выбраны способ бурения, типы долот и забойных двигателей, параметры режимов бурения скважин в конкретных геолого-технических условиях.
Сокращение времени цикла строительства скважины и снижение материальных затрат – основные направления получения экономической эффективности в нефтегазодобывающей отрасли. Выбор породоразрушающего инструмента при решении этой задачи является наиболее значимым. Большим прорывом в области усовершенствования породоразрушающего инструмента было применение долота режуще-скалывающего действия. Использование его при бурении скважин выявило преимущества по сравнению с шарошечными долотами [1-4].
Практически все проводимые исследования в области совершенствования винтовых забойных двигателей, используемых в процессах добычи нефти и газа, направленные на поиск оптимального режима работы двигателя в зависимости от условий конкретного месторождения. Так, используемое технологическое оборудование на промысле, в частности ДРУ 172 должно иметь возможность оперативно подстраиваться под изменение технологического режима, расходу и составу рабочей жидкости.
INTERNATIONALSCIENTIFICANDPRACTICALCONFERENCE |
| WWW.PERVIY-VESTNIK.RU |
~ 118 ~
ПЕРСПЕКТИВНЫЕНАУЧНЫЕИССЛЕДОВАНИЯ:ОПЫТ,ПРОБЛЕМЫИПЕРСПЕКТИВЫРАЗВИТИЯ
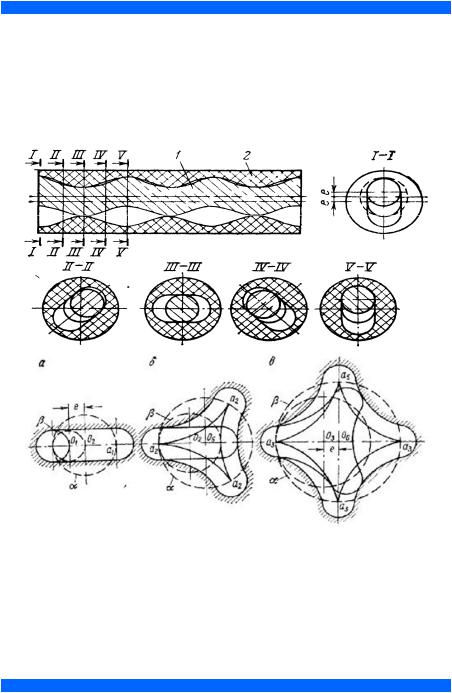
Винтовой забойный двигатель марки ДРУ 172 представляет собой объемную роторную машину, основными рабочими органами которой являются статор и ротор. Ротор представляет собой многозаходный винт с нарезкой заданного профиля, выполненный из стали, статор – выполнен из металлического корпуса в резиновой обкладке, на которую нанесены винтовые зубья (рис. 1).
Рисунок 1 – Рабочие органы винтового двигателя (1 – винтовой ротор; 2 – статор; I-V – осевые сечения; а – однозаходный; б – двухзаходный; в – трехзаходный)
Использование резиновой обкладки внутри статора необходимо с целью компенсировать конструктивные погрешности в выполнении элементов. При установке ротора в статор, его ось смещается на величину равную половине высоты зуба. За счет
МЕЖДУНАРОДНАЯНАУЧНО-ПРАКТИЧЕСКАЯКОНФЕРЕНЦИЯ | НИЦВЕСТНИКНАУКИ | WWW.PERVIY-VESTNIK.RU
~ 119 ~