

Кинематическая и пневматическая схемы
Рабочие движения исполнительных органов робота обеспечиваются кинематической структурой, которая реализуется конкретно в роботе в виде кинематических цепей. Кинематическая схема промышленного робота М10П.62.01 показана на рис. 3. Кинематическая схема состоит из следующих цепей. Кинематическая цепь – движение по координате В – ременная передача 16:26, червяк 1 и червячная шестерня 55. Конечные перемещения nоб.эл., об/мин, – поворот по координате В, рад. Кинематическая цепь по координатам А, С – электродвигатель, ременная передача 15:24, червячная пара 1:55. Конечные перемещенияnэл., об/мин, – поворот по координатам А, С, рад. Кинематическая цепь движения по координатам X, Z - электродвигатель, ременная передача 16:24, коническая пара 15:30, пара винт – гайка. Конечные перемещенияnэл., об/мин, – скорость перемещения Х, Z, мм/мин. Движение – вращение захватаосуществляется от пневмодвигателя.
|
|
|
Рис. 3 Кинематическая схема |

узел подготовки воздуха, который крепится на боковой стенке устройства программного управления ПР;
блоки пневмоаппаратуры приводов поворотных блоков Б и В (см. рис. 2, поз.3) и захватов.
Сжатый воздух от заводской сети поступает в узел подготовки воздуха – в фильтр-влагоотделитель для очистки его и отделения конденсата. Затем поступает в маслораспылитель МР для насыщения воздуха маслом. Очищенный и насыщенный воздух поступает к блокам пневмоаппаратуры.
На рис. 4 представлена пневмосхема блока поворота Б. При включении электромагнита YА1 пневмораспределителя P1 и отклоненном электромагните YА2 происходит поворот блока по координате против часовой стрелки. При этом воздух в пневмодвигатель поступает по магистрали 1–3, а через магистраль 2 происходит выход отработанного воздуха.
На рис. 5 представлена пневмосхема поворотного блока В. Фиксация блока осуществляется при включенном электромагните YА4 и отключенных электромагнитах YА1, YА2, YАЗ. При этом сжатый воздух по магистралям 2, 3, 6, 7 поступает в обе полости пневмодвигателя Д и по магистрали 5 в поршневую полость пневмоцилиндра Ц. При включенном электромагните YА3 пневмораспределителя Р3 воздух по магистрали 4 поступает в штоковую полость цилиндра Ц, происходит расфиксация блока. При включенном электромагните YА1 распределителя P1 и отключенном электромагните YА2 происходит поворот блока по координате против часовой стрелки. При этом воздух из полости пневмодвигателя Д вытесняется по магистрали Б, 2 через дроссель ДР1 и пневмораспределитель P1. При включенном электромагните YА2 пневмораспределителя Р2 и отключенном электромагните YА1 происходит поворот блока по координате по часовой стрелке. При этом воздух из полости пневмодвигателя Д вытесняется по магистрали 7, 3 через дроссель ДР2 и пневмораспределитель Р2.
|
|
|
|
Рис. 4 Пневмосхема блока поворота "Б" |
Рис. 5 Пневмосхема блока поворота "В" |


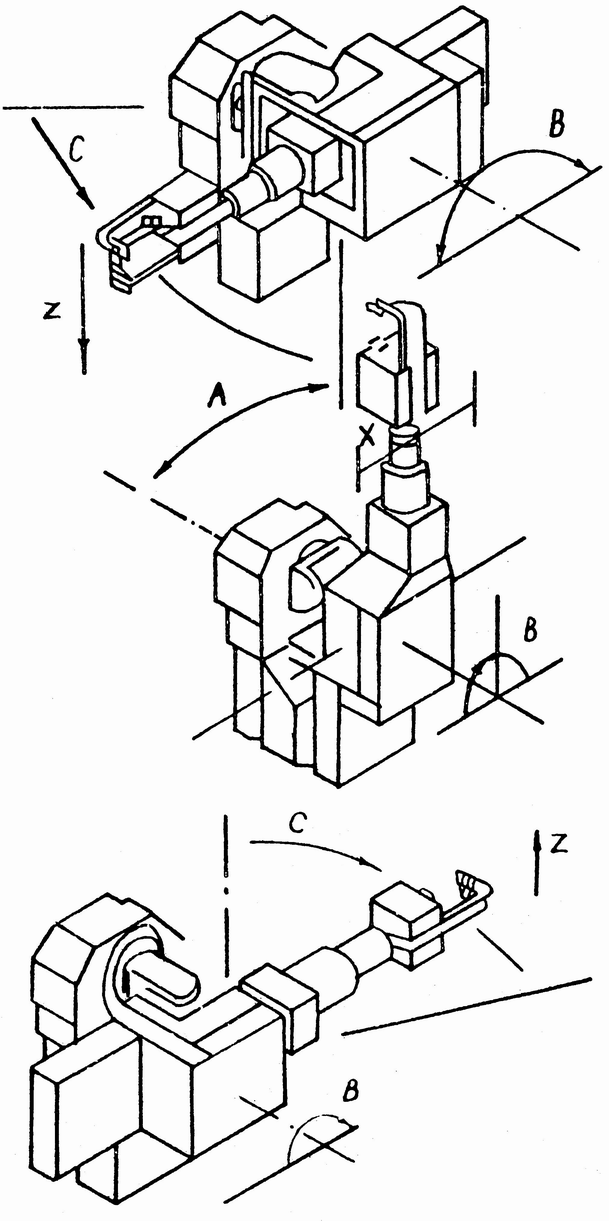
В режиме "обучение" необходимо обеспечить выход в нулевую точку и обучение робота управляющей программе. Нулевая точка служит исходной точкой всех перемещений при повторении и обучении. Выход в нулевую точку осуществляется каждый раз после включения питания, повторного запуска программного обеспечения и сбоя привода подач. Перемещение при этом происходит в последовательности ВА/СХ/Z. Робот может иметь три нулевые точки, выход в которые показан на рис. 6. Положение нулевой точки зависит от комплектации робота узлом нулевой точки.
В режиме "обучение" необходимо обеспечить выход в нулевую точку и обучение робота управляющей программе. Нулевая точка служит исходной точкой всех перемещений при повторении и обучении. Выход в нулевую точку осуществляется каждый раз после включения питания, повторного запуска программного обеспечения и сбоя привода подач. Перемещение при этом происходит в последовательности ВА/СХ/Z. Робот может иметь три нулевые точки, выход в которые показан на рис. 6. Положение нулевой точки зависит от комплектации робота узлом нулевой точки.
В режиме “Повторение” робот по команде “Пуск” или при поступлении запроса от станка обрабатывает управляющую, которая находится в памяти устройства управления. В этом режиме робот осуществляет замену инструмента, деталей, управляет ограждением, патроном, пинолью, тактовым столом и т.д. Пример рабочего цикла при смене детали на токарном станке показан ниже.
В режиме “Редактирование” проводится стирание, замена или ввод данных в управляющую программу.
|
|
|
Рис. 6 Положение нулевых точек робота |
|
Станок |
Запрос на обслуживание (пуск робота). Резание завершено, шпиндель остановлен |
|
|
|
|
Станок |
Открытие ограждения по команде робота |
|
|
|
|
Робот |
Подвод руки к патрону и зажим детали |
|
|
|
|
Станок |
Разжим патрона по команде робота |
|
|
|
|
Робот |
Отвод руки с деталью от станка и установка на тактовый стол |
|
|
|
|
Станок |
Обдув патрона по команде робота |
|
|
|
|
Тактовый стол |
Перемещение пластины стола по команде робота |
|
|
|
|
Робот |
Зажим заготовки и подвод руки к патрону |
|
|
|
|
Станок |
Зажим патрона по команде робота |
|
|
|
|
Робот |
Разжим захвата и отвод руки |
|
|
|
|
Станок |
Закрытие ограждения по команде робота |
|
|
|
|
Станок |
Запуск цикла по команде робота |
Изучить устройство ПР Мод. М10П.62.01.
Изучить кинематику и пневмосистему ПР Мод. М10П.62.01.
Выполнить отчет: кинематическая схема робота, схема базирования робота относительно станка, расчет.
|
№ пп |
Показатель |
Величина показателя |
|
1 |
Количество обслуживаемых станков, шт. |
1 |
|
2 |
Грузоподъемность, кг |
|
|
Номинальная / Полезная при установке одиночного захвата |
20 / 10 | |
|
3 |
Погрешность позиционирования, мм |
0.5 |
|
4 |
Максимальные линейные перемещения по координатам X и Z, мм |
150 |
|
5 |
Максимальные угловые перемещения по координатам, град. |
|
|
А / С / В / |
90 / 120 / 180 / 90, 180, 270 | |
|
6 |
Диапазон скорости линейного перемещения, мм/с |
0.008…0.5 |
|
7 |
Число степеней подвижности |
6 |
|
8 |
Усилие захватывания, не менее, Н |
810 |
|
9 |
Время захватывания при полном ходе, с |
2 |
|
10 |
Диапазон размеров захватываемых деталей, мм |
|
|
По наружному / внутреннему диаметрам |
20…150 / 38…168 | |
|
11 |
Тип привода перемещений |
Электрический – координаты: X, Z, A, B, C Пневматический – координата |
|
12 |
Масса робота, кг |
145 |
|
13 |
Габаритные размеры робота, мм |
|
|
ширина / длина / высота |
340 / 1238 / 751 |