Некоторые характерные области применения срв. Инерциальная система измерения параметров пространственного движения самолета.
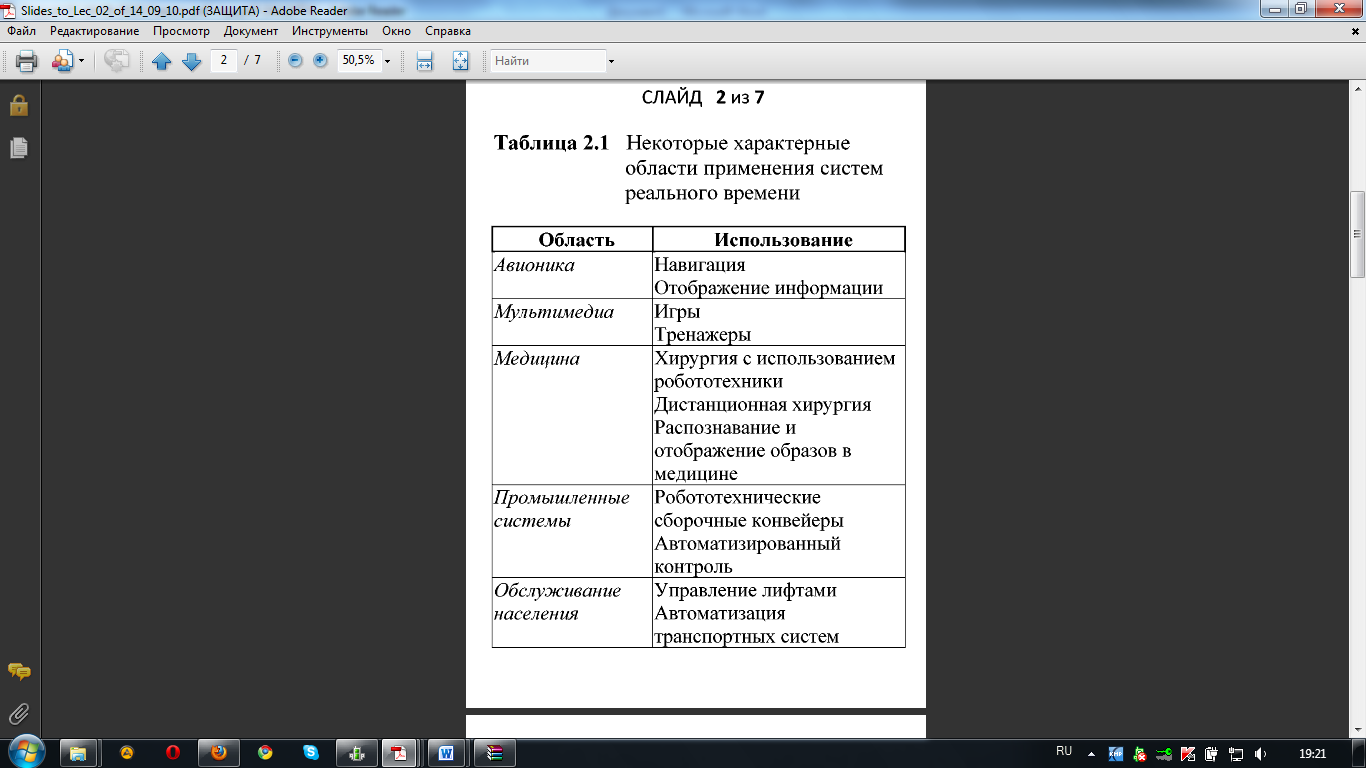
Рассмотрим инерциальную систему измерения параметров пространственного движения самолета. Спецификация ПО устанавливает, что ПО должно получать импульс акселерометра по осям X, Y и Z с частотой 10 миллисекунд от специального оборудования. ПО будет получать температуру с частотой 1с. Задача ПО состоит в вычислении истинного вектора скорости в зависимости от положения самолета в пространстве, данных с акселерометров, а также от различных корректирующих факторов (например, изменения температуры окружающей среды) с частотой 40мс. Система должна вывести векторы истинных ускорения, скорости, и пространственного положения для их отображения на дисплее каждые 40мс, но с использованием различных тактовых генераторов. Эти задачи выполняются для 4 различных частот измерения в инерциальной системе и нуждаются в обмене данными и синхронизации. Показания акселерометра должны быть связанными один с другим либо быть коррелированными, т.е. нежелательно смешивать импульс х в момент времени t акселерометра с импульсами z, y в момент времени t+1. Эти вопросы являются очень важными при разработке системы.
Типы воздействий в срв. Обобщенная модель срв.
Одним из путей рассмотрения системы реального времени является ее анализ как системы типа «воздействие реакция (отклик)».
Получив определенное входное воздействие, система выдает соответствующую реакцию (отклик). Таким образом, поведение системы реального времени может быть определено путем сопоставления воздействия, реакции и времени при котором эта реакция получена, т.е. получения таблицы значений, связывающей между собой время, воздействие и реакцию системы.
Воздействия подразделяются на два класса:
(1) Периодические воздействия. Они задаются в определенные фиксированные периодические промежутки времени. Например, система может опрашивать датчик каждые 50 миллисекунд, и осуществлять действия (реагировать) в зависимости от значения, считанного с датчика (воздействие).
(2) Апериодические воздействия. Они происходят нерегулярно. Это, как правило, сигналы прерывания от аппаратной части компьютера. Примером такого воздействия может служить прерывание сигнализирующее о том, что передача данных при вводе/выводе завершена и данные помещены в буфер.
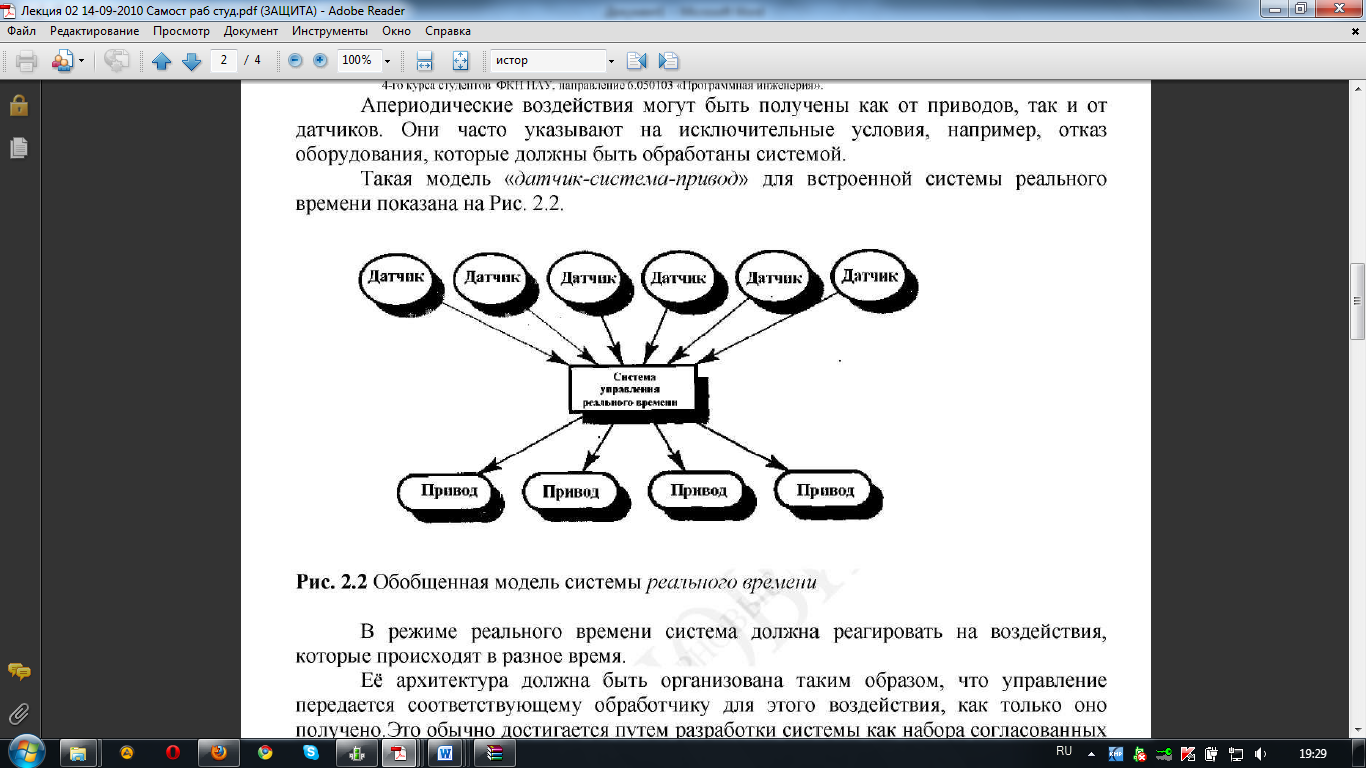
Периодические воздействия в системе реального времени обычно генерируются датчиками, связанными с самой системой. Они предоставляют информацию о состоянии внешней, по отношению к системе, среды. Отклики системы направлены на набор приводов, которые контролируют некоторые технические устройства, оказывающими влияние внешнюю среду.
Апериодические воздействия могут быть получены как от приводов, так и от датчиков. Они часто указывают на исключительные условия, например, отказ оборудования, которые должны быть обработаны системой.
Типы воздействий в срв. Система управления процессами датчик/привод.
Одним из путей рассмотрения системы реального времени является ее анализ как системы типа «воздействие реакция (отклик)».
Получив определенное входное воздействие, система выдает соответствующую реакцию (отклик). Таким образом, поведение системы реального времени может быть определено путем сопоставления воздействия, реакции и времени при котором эта реакция получена, т.е. получения таблицы значений, связывающей между собой время, воздействие и реакцию системы.
Воздействия подразделяются на два класса:
(1) Периодические воздействия. Они задаются в определенные фиксированные периодические промежутки времени. Например, система может опрашивать датчик каждые 50 миллисекунд, и осуществлять действия (реагировать) в зависимости от значения, считанного с датчика (воздействие).
(2) Апериодические воздействия. Они происходят нерегулярно. Это, как правило, сигналы прерывания от аппаратной части компьютера. Примером такого воздействия может служить прерывание сигнализирующее о том, что передача данных при вводе/выводе завершена и данные помещены в буфер.
Периодические воздействия в системе реального времени обычно генерируются датчиками, связанными с самой системой. Они предоставляют информацию о состоянии внешней, по отношению к системе, среды. Отклики системы направлены на набор приводов, которые контролируют некоторые технические устройства, оказывающими влияние внешнюю среду.
Апериодические воздействия могут быть получены как от приводов, так и от датчиков. Они часто указывают на исключительные условия, например, отказ оборудования, которые должны быть обработаны системой.
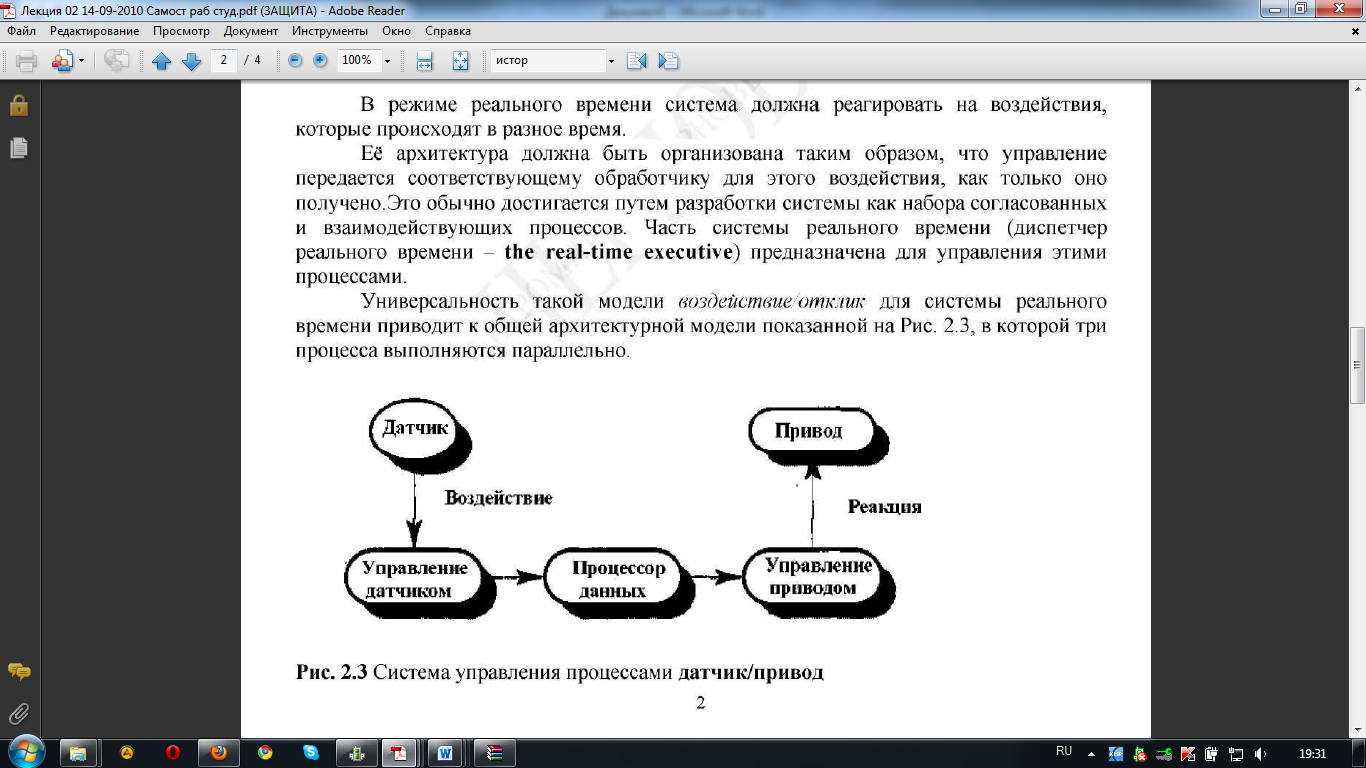
В режиме реального времени система должна реагировать на воздействия, которые происходят в разное время.
Её архитектура должна быть организована таким образом, что управление передается соответствующему обработчику для этого воздействия, как только оно получено. Это обычно достигается путем разработки системы как набора согласованных и взаимодействующих процессов. Часть системы реального времени (диспетчер реального времени - the real-time executive) предназначена для управления этими процессами.
Универсальность такой модели воздействие отклик для системы реального времени приводит к общей архитектурной модели показанной на Рис. 2.3, в которой три процесса выполняются параллельно.