

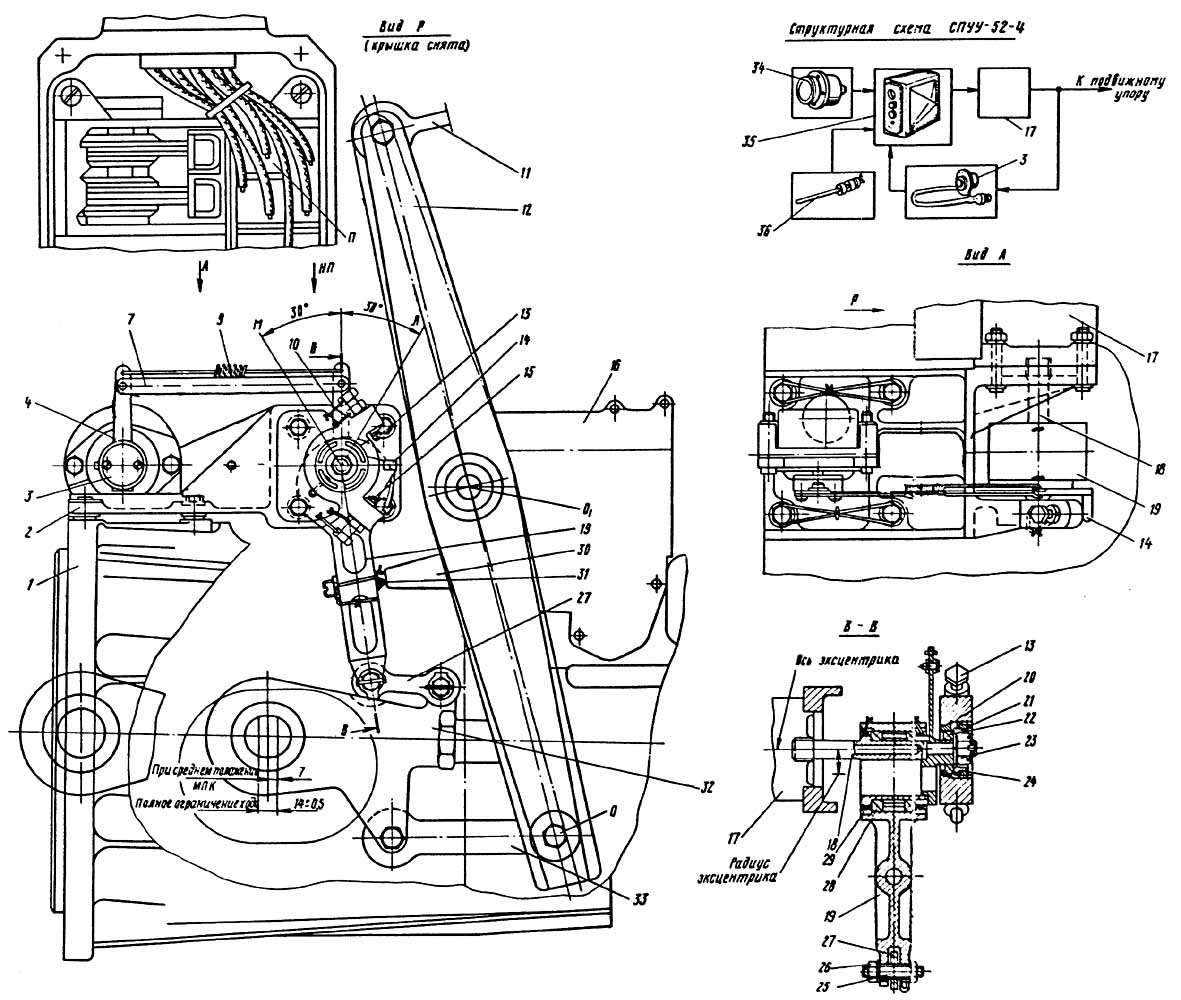
Кинематическая схема системы подвижного упора управления спуу-52-4
Рис. 1
-
1.
Кронштейн крепления КАУ-140
2.
Кронштейн агрегатов
3.
Датчик обратной связи (ДОС 6С25.53.000-1)
4.
Поводок
7.
Тяга
9.
Пружина
10.
Поводок
11.
Тяга путевого управления
12.
Золотниковая качалка
13.
Болт-упор (дпя φмакс = 20°)
14.
Упор
15.
Болт-упор (для φмакс = 24°)
16.
Комбинированный агрегат управления КАУ-140-01
17.
Электромеханизм МПК-13А-5
18.
Эксцентрик
19.
Рычаг
20.
Обойма
21.
Гайка
22.
Шарикоподшипник
23.
Гайка
24.
Сферическое кольцо
25.
Болт
26.
Шаровой подшипник
27.
Звено
28.
Шарикоподшипник
29.
Гайка
30.
Упор
31.
Подвижный упор
32.
Силовой шток КАУ-140-01
33.
Тяга
34.
Датчик давления ИКД-27Да-400-830
35.
Блок управления БУ-32
36.
Датчик температуры П1
Система подвижного упора управления спуу-52-4
Рис. 2
3. |
Работа Команда на изменение положения подвижного упора 31 в зависимости от изменения давления и температуры наружного воздуха поступает в электромеханизм 17 от блока управлении 35, суммирующего сигналы датчиков давления 34, температуры 36 и обратной связи 3. Когда сигнал с датчика обратной связи 3 скомпенсирует сигналы датчиков температуры и давления, просуммированные в блоке 35, электромеханизм 17 отключается. При включении электромеханизма 17 его выходной вал поворачивает эксцентрик 18 и перемещает рычаг 19 с подвижным упором 31, ограничивая перемещение штока агрегата 16. При перемещении педалей золотниковая качалка 12 вначале поворачивается вокруг оси "О" и смещает золотник, после чего начинает перемещаться шток 32 рулевого привода, а золотниковая качалка 12 дальше начинает поворачиваться вокруг оси "О1". При перемещении левой педали вперед до упора ход проводки управления ограничен ходом штока 32 агрегата на выпуск. В этом случае максимальный угол отклонения лопастей рулевого винта является постоянным и равен -11°25'. При перемещении правой педали вперед ограничение перемещения штока 32 рулевого привода на уборку происходит следующим образом. Шарнирно связанное со штоком звено 27 поворачивает рычаг 19, нажимает на упор 30, связанный с золотником агрегата 16 и переводит золотник в среднее положение. Шток 32 при этом останавливается. При изменении температуры и давления наружного воздуха меняется угол поворота вала электромеханизма 17 и связанного с ним эксцентрика 18. Угол поворота механизма 17 ограничен упорами 13 и 15. Упор 15 соответствует углу φмакс = 24°, упор 13 – углу φмакс = 20°. Если педали неподвижны, а силовой шток 32 комбинированного агрегата управления перемещается по сигналу автопилота, то ограничение хода штока 32 происходит так же, как и на режиме управления летчиком при помощи перемещений педалей. |