

6.4.Групповые излучатели
Линейная группа излучателей (звуковые колонки)
Для повышения мощности и получения острых характеристик направленности применяют групповые излучатели, составленные, как правило, из некоторого числа (от двух до восьми) диффузорных головок, расположенных вдоль вертикальной линии на небольшом расстоянии друг от друга.
В горизонтальной плоскости направленность группы не отличается от направленности одиночной головки того же типа. Однако в вертикальной плоскости диаграмма направленности такой группы значительно обостряется за счет интерференции излучений отдельных головок.
На рис.6.10. схематично изображена линейная группа излучателей.
Если взять точку наблюдения на акустической
оси колонки на расстоянии r
>> d,
то можно считать, что звуковые давления
от отдельных головок pi
будут в ней синфазны. Следовательно,
общее звуковое давление p0
,будет равно арифметической сумме
давлений, создаваемых отдельными
головками громкоговорителей:
![]() ,
где n–количество головок
в группе.
,
где n–количество головок
в группе.
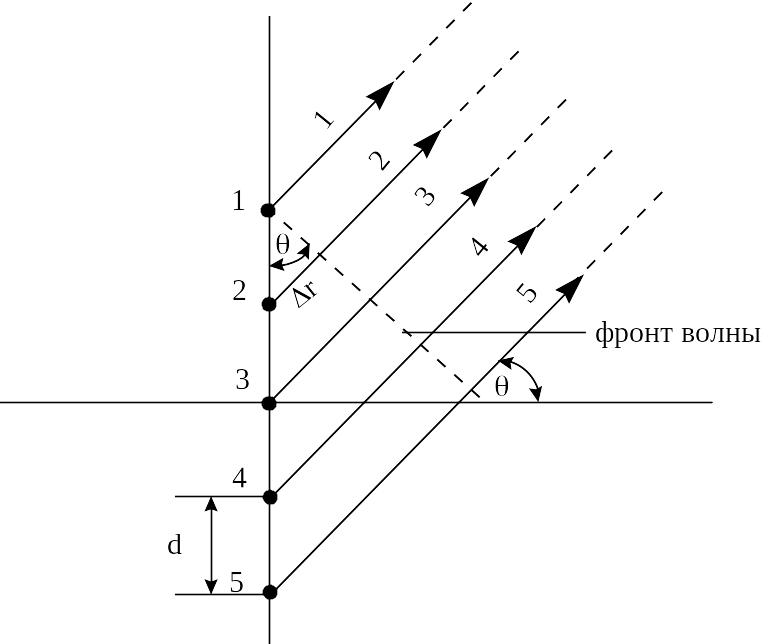
Рис.6.10. К объяснению направленности звуковой колонки (d–расстояние между отдельными головками)
Рассмотрим теперь точку наблюдения в стороне от акустической оси, под углом на том же расстоянии от акустического центра колонки. Звуковые лучи от отдельных громкоговорителей теперь будут проходить разные пути до точки наблюдения. Так, разность хода у 1 и 2 лучей согласно рис.6.10:
Сдвиг по фазе у этих лучей составит .
Общее давление в точке наблюдения будет равно геометрической сумме давлений pi от отдельных излучателей:
![]() ,
,
где
![]() –звуковое
давление, развиваемое в точке наблюдения
одной головкой.
–звуковое
давление, развиваемое в точке наблюдения
одной головкой.
Поскольку размеры колонки значительны, то даже на низких частотах такая группа обладает направленностью в вертикальной плоскости. С увеличением угла суммарное звуковое давление p0 уменьшается. С ростом частоты отношение вертикального размера колонки l=d(n–1) к длине волны увеличивается, что приводит к обострению диаграммы направленности.
Вид диаграммы направленности напоминает полуэллипс (рис.6.11).
С точки зрения охвата как можно большей площади, на которой расположены слушатели, широкая диаграмма направленности колонки в горизонтальной плоскости является желательной. Напомним, что она совпадает с диаграммой направленности одной головки. С ростом частоты диаграмма обостряется, при этом уменьшается облучаемая площадь. Для расширения диаграммы направленности на высоких частотах в горизонтальной плоскости в колонку монтируют не одну цепочку излучателей, а две (иногда три) и их акустические оси разворачивают на 60 .
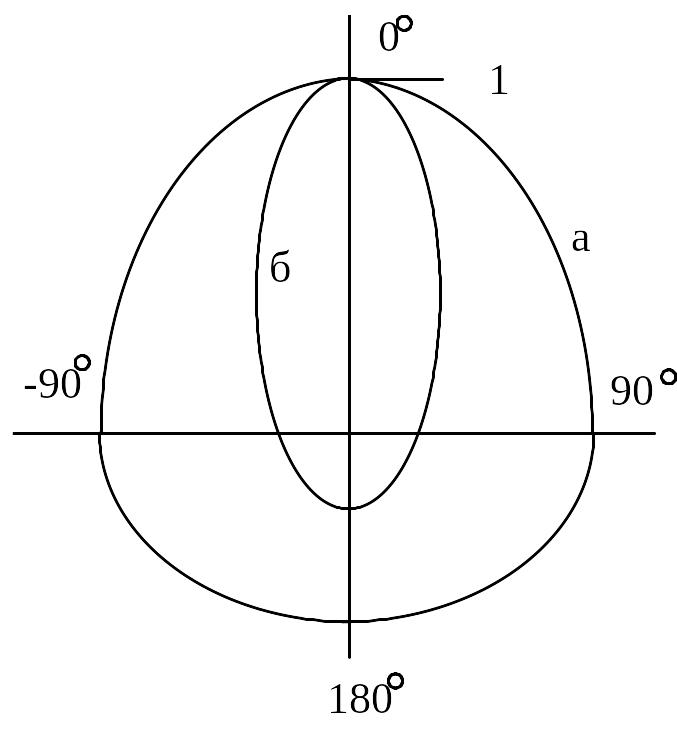
Рис. 6.11. Диаграмма направленности звуковой колонки в горизонтальной–а и вертикальной–б плоскостях
Получающаяся у звуковой колонки диаграмма направленности–широкая в горизонтальной плоскости и узкая в вертикальной–удобна. Охватывается широкая площадь, занятая слушателями, и уменьшается бесполезное излучение выше указанной площади.
Если требуется увеличить направленность колонки в вертикальной плоскости, то размещают две (иногда три) колонки друг над другом. Из-за острой направленности высоту подвеса колонки подбирают так, чтобы ее акустическая ось проходила под углом 5–10 относительно плоскости, проходящей через уши слушателей. При этом необходимо контролировать, чтобы звуковое давление в первом ряду не превысило допустимых значений.
При озвучении открытых пространств (парки, скверы, площади и т.п.) иногда требуется круговая диаграмма направленности в горизонтальной плоскости. Такая диаграмма достигается применением группы электродинамических диффузорных головок, расположенных по окружности. Оси их наклонены вниз под углом 45. Число головок обычно берут от четырех до шести. В нижней части такого громкоговорителя располагают круговой отражатель, уменьшающий излучение вниз непосредственно под излучателем.
Электродинамические головки прямого излучения
В электродинамических головках диафрагма (диффузор) выполняет две функции: функцию преобразования механических колебаний в акустические и функцию излучения звука в окружающую среду. Здесь диафрагма непосредственно связана со средой, поэтому такие головки называют головками непосредственного (или прямого) излучения. На рис.6.16. показано устройство такой головки.
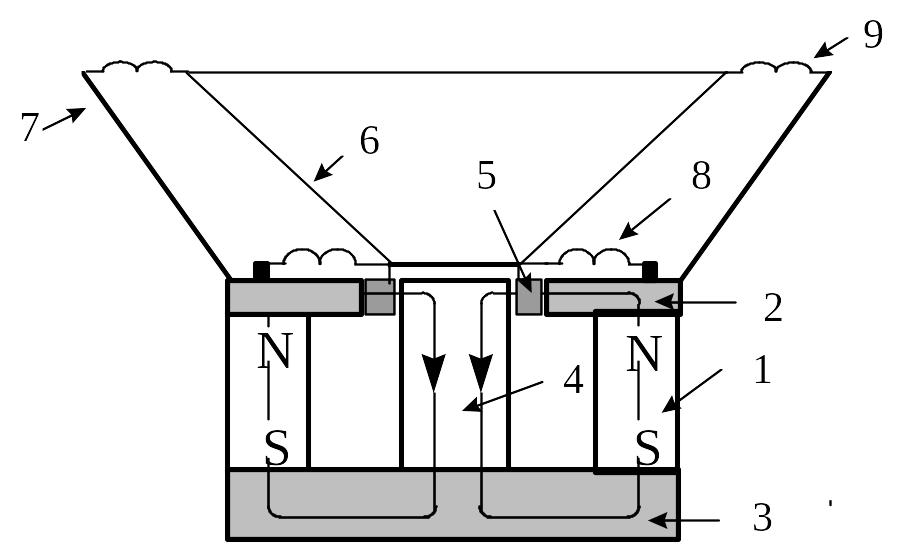
Рис.6.16. Электродинамическая головка прямого излучения :
1–кольцевой магнит; 2–верхний фланец; 3–нижний фланец; 4–керн; 5–звуковая катушка; 6–диффузор; 7–диффузородержатель; 8–центрирующая шайба; 9–верхнее гофрированное кольцо
Головка состоит из двух систем–магнитной и подвижной механической. Магнитная система состоит из кольцевого магнита 1, верхнего 2 и нижнего 3 фланцев и центрального стержня 4, называемого керном. Фланцы и керн представляют собой магнитопровод. В некоторых конструкциях используют стержневой магнит 4, тогда кольцо 1 является частью магнитопровода.
Верхний фланец имеет отверстие, в которое входит верхняя часть керна. Диаметр отверстия подобран так, чтобы между внутренней поверхностью отверстия и верхней частью керна образовался кольцевой зазор, в который помещают намотанную на каркас звуковую катушку 5, свободно колеблющуюся в нем в осевом направлении.
Каркас звуковой катушки приклеивается к нижней части диффузора. Сам диффузор обычно отливается из специальной бумажной массы. Для придания ему жесткости форма диффузора выбирается в виде усеченного конуса с круговым или эллиптическим основанием, что позволяет считать его вплоть до достаточно высоких частот жестким поршнем. Диффузор подвешен вверху к конусному диффузородержателю 7 с помощью верхнего гибкого гофрированного кольца 9 и внизу к верхнему фланцу с помощью центрирующей шайбы 8. Элементы подвеса должны допускать свободное перемещение диффузора только в осевом направлении и противодействовать радиальному смещению звуковой катушки.
Из показанного на рис.6.12 хода магнитных
силовых линий видно, что в воздушном
кольцевом зазоре катушка находится в
радиальном магнитном поле. При пропускании
по катушке тока на проводник действует
электродинамическая сила, равная по
закону Био-Савара
![]() ,
где В–индукция в зазоре; l–длина
провода звуковой катушки. Эта сила
приводит в движение катушку, а вместе
с ней и диффузор.
,
где В–индукция в зазоре; l–длина
провода звуковой катушки. Эта сила
приводит в движение катушку, а вместе
с ней и диффузор.
Механическое сопротивление
Определим элементы механической подвижной системы головки, участвующие в движении. Электродинамическая сила F прикладывается к массе m0, которая состоит из массы диффузора, звуковой катушки и соколеблющихся масс верхнего гофрированного кольца и центрирующей шайбы. Масса системы движется вдоль оси головки, будучи подвешенной на этих двух гофрированных кольцах, которые представляют собой гибкость c0, определяющую величину возвращающей упругой силы. При изгибе элементов подвеса диффузора в них возникает активное сопротивление потерь, обусловленное внутренним трением r0. Сам диффузор, будучи связанным со средой, нагружается на активное сопротивление излучения rR, характеризующее отдаваемую в среду активную составляющую акустической мощности. Присоединенная масса среды mR определяет реактивную составляющую сопротивления излучения, а значит и реактивную мощность, которой излучатель и среда обмениваются между собой.
На рис.6.13 показано устройство подвижной системы, ее механическая схема с учетом среды и схема ее электрического аналога. Метод электромеханических аналогий и принципы построения схем электрических аналогов подробно рассмотрены в 3 .
Механическое сопротивление между точками а–б согласно рис 6.13-4:
 ,
,
где
 –механическое
сопротивление подвижной системы;
–механическое
сопротивление подвижной системы;
![]() –механическое
сопротивление среды (сопротивление
излучения).
–механическое
сопротивление среды (сопротивление
излучения).
Если согласно схеме аналога объединить массу подвижной системы mo с присоединенной массой среды mR, а также активное сопротивление потерь ro с активной составляющей сопротивления излучения rR, то m = mo + mR и
r = ro + rR, тогда схема аналога будет выглядеть так, как показано на рис.6.14.
Как видно из рисунка схема аналога
механической подвижной системы головки
представляет собой последовательный
колебательный контур. Следовательно,
механическое сопротивление подвижной
системы головки в общем виде определится
как
 .
Частота основного (механического)
резонанса подвижной системы–
.
Частота основного (механического)
резонанса подвижной системы–
 .
.
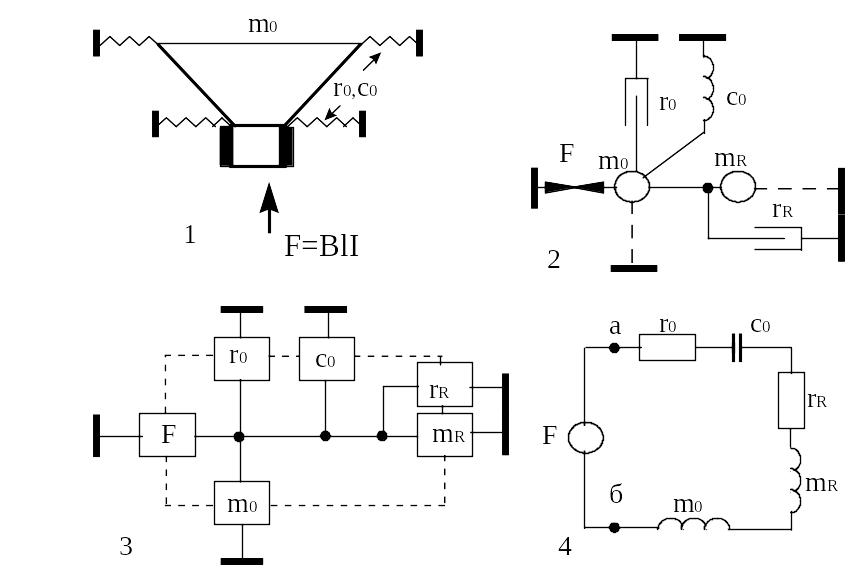
Рис.6.13. К определению механического сопротивления подвижной системы головки: 1–устройство механической подвижной системы; 2–механическая схема с учетом среды; 3–промежуточная схема; 4–схема электрического аналога
Рис.6.14. Схема электрического аналога подвижной системы головки с учетом среды
Входное электрическое сопротивление головки
Из теоремы об электрическом эквиваленте
преобразователя–двигателя 3,
его входное электрическое сопротивление
равно:
![]() ,
где Z0–собственное
электрическое сопротивление
преобразователя; Zвн–внесенное
в электрическую цепь сопротивление со
стороны механической колебательной
системы. Для рассматриваемой
электродинамической головки входное
сопротивление будет:
,
где Z0–собственное
электрическое сопротивление
преобразователя; Zвн–внесенное
в электрическую цепь сопротивление со
стороны механической колебательной
системы. Для рассматриваемой
электродинамической головки входное
сопротивление будет:
|
(6.9) |
|
где – |
||
 –внесенное сопротивление1.
–внесенное сопротивление1.
Рассмотрим величину, обратную внесенному сопротивлению, т.е. внесенную проводимость Yвн:

Как видно из последней формулы, внесенная проводимость состоит из трех ветвей, состоящих из сопротивлений:
|
(6.10) |
|
(6.11) |
|
(6.12) |
 ,
, ,
,Теперь формула (6.9) примет вид
|
(6.13) |

Электрическая схема, соответствующая (6.13) приведена на рис.6.15.
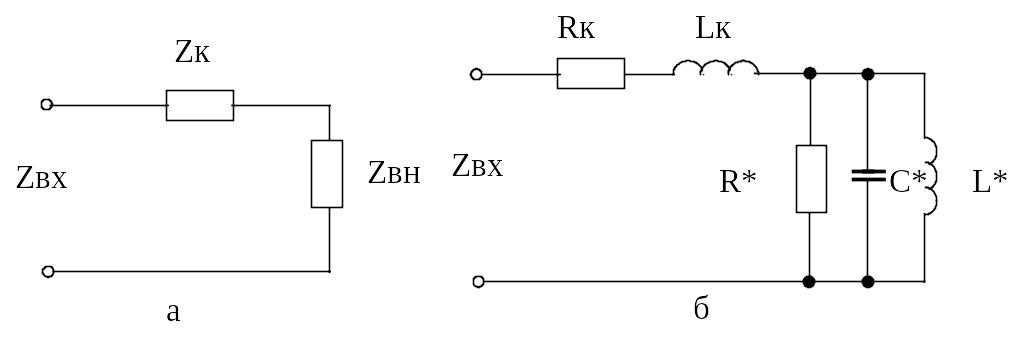
Рис.6.15. Схема входного сопротивления головки
Частотная характеристика входного сопротивления представлена на рис.6.16.
Величина активного сопротивления катушки обычно составляет 4–10 Ом. Индуктивность катушки–несколько миллигенри. Поэтому на низких частотах вблизи первого резонанса сопротивлением звуковой катушки можно
пренебречь. Входное сопротивление будет в основном определяться вносимым сопротивлением (параллельный контур).
При =0 (постоянный
ток) входное сопротивление минимально
и равно Rк–омическому
сопротивлению звуковой катушки. С ростом
частоты растет и Zвх,
достигая максимума на частоте
параллельного резонанса контура LC
(рис.6.15)  .
.
Если подставить вместо LC
их значения
(6.11-6.12), то получим
 .
.
Это означает, что резонансная частота параллельного контура LC совпадает с резонансной частотой механической подвижной системы. Поэтому этот резонанс называют механическим.
Максимальное значение
![]() при резонансе объясняется тем, что
механическая система колеблется с
максимальной скоростью и противоЭДС,
индуктируемая при движении катушки (
при резонансе объясняется тем, что
механическая система колеблется с
максимальной скоростью и противоЭДС,
индуктируемая при движении катушки (![]() становится максимальной. Максимально
и вносимое сопротивление. При этом R
в несколько раз превышает
становится максимальной. Максимально
и вносимое сопротивление. При этом R
в несколько раз превышает
![]() .
До частоты 0
реактивная составляющая вносимого (а
значит и входного) сопротивления носит
индуктивный характер; на частоте
резонанса она меняет знак, становясь
емкостной.
.
До частоты 0
реактивная составляющая вносимого (а
значит и входного) сопротивления носит
индуктивный характер; на частоте
резонанса она меняет знак, становясь
емкостной.
С увеличением частоты входное сопротивление убывает вследствие уменьшения колебательной скорости катушки и соответствующего уменьшения противоЭДС. На схеме это соответствует уменьшению сопротивления емкостной ветви C. Сопротивлением индуктивной ветви L теперь можно пренебречь, так как XL. >> XC.
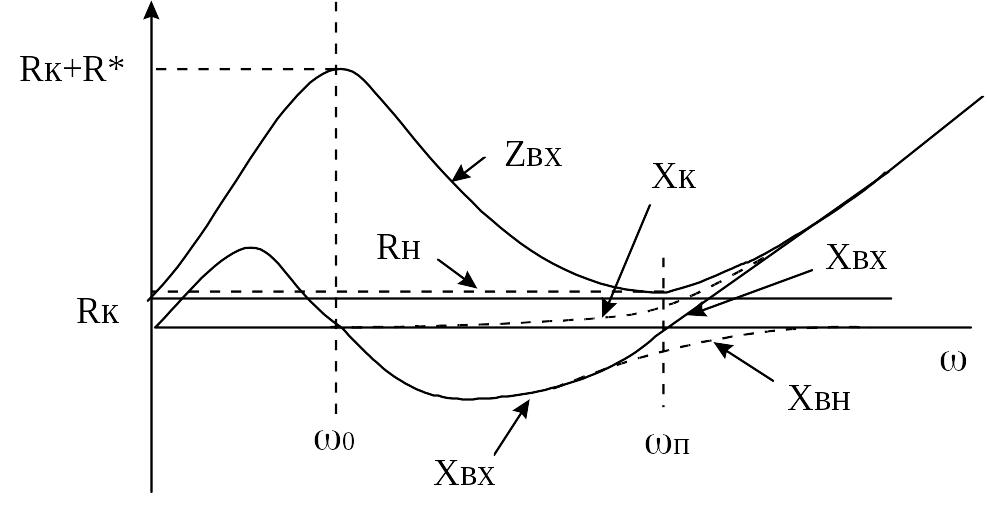
Рис.6.16. Частотная характеристика входного сопротивления электродинамической головки и его компонентов: xк–индуктивное сопротивление звуковой катушки; xвн–реактивная составляющая вносимого сопротивления; хвх–реактивная составляющая входного сопротивления головки; Rк–активное сопротивление звуковой катушки; Rн–минимальное (номинальное) значение входного сопротивления при втором (последовательном) резонансе.
Теперь образуется эквивалентный последовательный контур Lк C. Выше частоты 0 индуктивное сопротивление звуковой катушки начинает играть заметную роль и на частоте п становится равным емкостному сопротивлению ветви C. Образуется второй, теперь уже последовательный резонанс. Физически это объясняется тем, что при =п противоЭДС, обусловленная самоиндукцией катушки и движением ее в магнитном поле имеют равные амплитуды, но почти противоположные фазы. Этот резонанс иногда называют электромеханическим.
На частоте =п реактивная компонента Zвх снова меняет знак, становясь индуктивной. С ростом частоты сопротивление емкостной ветви становится настолько малым, что им (а значит и всем вносимым сопротивлением) можно пренебречь. Физически это объясняется малым значением амплитуды колебательной скорости звуковой катушки на высоких частотах.
Таким образом, выше частоты последовательного
резонанса входное сопротивление головки
в основном определяется сопротивлением
звуковой катушки
![]()
Ввиду индуктивного характера сопротивления катушки входное сопротивление головки монотонно растет с частотой. При этом, естественно, уменьшается потребляемая электрическая мощность, а значит и отдаваемая акустическая.