

Курсовая работа по ТАУ №2 (АТП) / Курсовая по ТАУ
.docЗадание на курсовую работу по дисциплине
«Теория управления»
Выдано студенту Зубареву Денису Игоревичу
группы АТП –311 26.02.2001 г.
Срок сдачи работы неделя.
Тема работы: Динамический расчет системы автоматического управления по заданным требованиям к качеству ее работы.
Вариант задания: 2-7-25-3-6-1-1
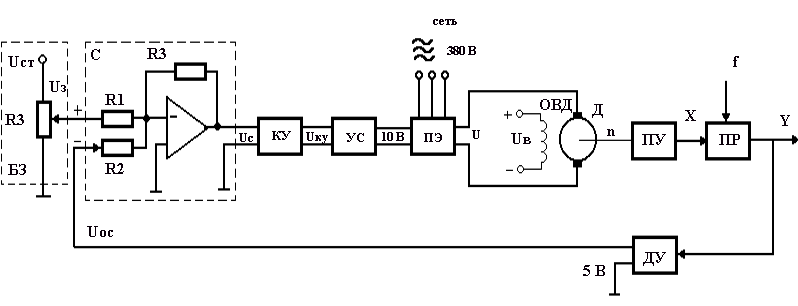
Исходная схема САУ:
Исходные данные к работе:
При точении жаропрочного сплава ХН77ТЮР резцом ВК6М с параметрами заточки rв=1 мм; =0; =1=100; =1=450 оптимальная температура 0 составляет 7200С.
Vд=30м/мин; S=0.084мм/об; tП MAX=0.9мм; tП MIN=0.8мм.
nн= 750 об/мин; =80.5 %; RЯ= 0.26 Ом; LЯ = 9 mГн; jН=0.23 кг/м2.
Требования к системе: = 50С, =300, L6 дб.
Содержание:
Введение……………………………………………………………..4
-
Анализ и описание работы САУ……………………………..5
-
Вывод уравнений динамики………………………………….5
-
Анализ качества нескорректированной САУ……………….8
-
Синтез САУ……………………………………………………11
-
Анализ качества скорректированной САУ…………………14
-
Теническая реализация корректирующего устройства…….14
-
Анализ наблюдаемости и управляемости системы………...15
Заключение…………………………………………………………..17
Список литературы………………………………………………….18
Введение.
Теория автоматического управления и регулирования – наука, которая изучает процессы управления, методы их исследования и основы проектирования автоматических систем, работающих по замкнутому циклу, в любой области техники. Целью данной работы является проектирование системы автоматического управления (САУ) среднеквадратической температурой в области резания. Данная САУ должна поддерживать температуру в области резания на заданном уровне с определенной точностью и отвечать требованиям точности и быстродействия. Метод анализа и синтеза САУ, примененный в данной работе это метод с использованием логарифмических частотных характеристик (ЛЧХ) системы. Он является наиболее удобным, благодаря простоте, наглядности и точности, и поэтому используется в данной работе.
1.Анализ и описание работы САУ.
По алгоритму функционирования данная САУ является следящей. В ней выходная величина – температура в области резания – регулируется с заданной точностью при изменением напряжения напряжения на входе , т.е. система управляет выходной координатой.
На вход системы подается напряжение UЗ, соответствующее заданной температуре в области резания. Это напряжение сравнивается с напряжением UОС поступающим с датчика обратной связи – естественной термопары. Если существует ненулевая разница этих напряжений – ошибка регулирования , то она с соответствующим знаком поступает на корректирующее устройство (КУ), усилитель (У), преобразователь электрический (ПЭ). ПЭ таким образом меняет напряжение на своем выходе, чтобы свести ошибку регулирования - путем изменения скорости вращения двигателя- к минимуму или нулю. Если на систему действуют возмущения, то система с обратной связью будет компенсировать эти возмущения, поддерживая температуру в области резания постоянной.
Функциональная схема состоит из элементов, выполняющих законченную функцию:
 2.
Вывод уравнений динамики.
2.
Вывод уравнений динамики.
2.1. Получение передаточных функций элементов САУ.
2.1.1. Двигатель.
 UВ
– напряжение на обмотке возбуждения
двигателя;
UВ
– напряжение на обмотке возбуждения
двигателя;
UВ = const.
Передаточная функция двигателя имеет вид:
![]() ,
где
,
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
LЯ – индуктивность обмотки якоря;
RЯ – активное сопротивление обмотки якоря;
JЯ – ток в обмотке якоря;
ФД – поток возбуждения двигателя;
Н – номинальная скорость вращения вала двигателя;
PН – номинальная мощность двигателя;
UН – номинальное напряжение на обмотке двигателя;
С – конструктивная постоянная;
JПР – суммарный момент инерции, приведенный к оси двигателя.
Передаточная функция имеет вид:
![]()
2.1.2 Преобразователь электрический.
Передаточная функция ПЭ имеет вид:
![]() ,
где
,
где
T1=0.193 c, T2=0.22 c.
KПЭ найдем из условия:
![]() .
.
2.1.3 Передаточное устройство.
Передаточная функция ПУ имеет вид:
![]() ,
где
,
где
T=0 c, r = 100 мм.
![]() .
.
2.1.4 Процесс резания.
Процесс резания описывается уравнением:
![]()
Зависимость температуры от скорости имеет вид:
При
![]()
Л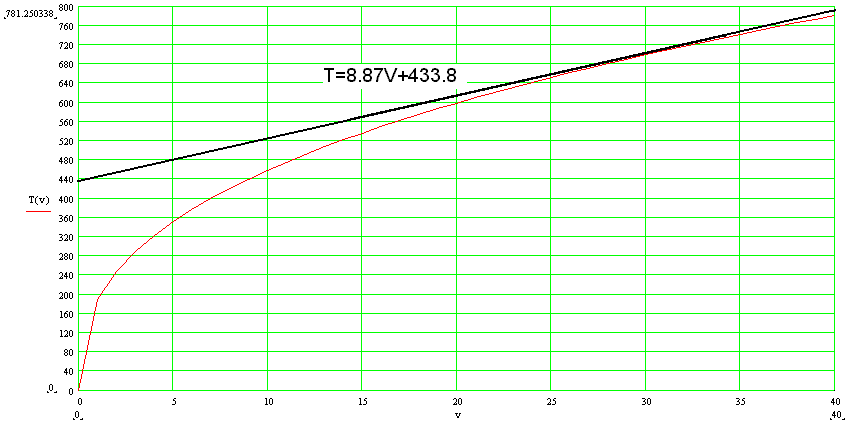 ианиаризуем
эту зависимость:
ианиаризуем
эту зависимость:
![]()
Берем
![]()
2.1.5 Датчик обратной связи.
Передаточная функция ДУ имеет вид:
![]() ,
где
,
где
T=0 c.
![]() .
.
 Структурная
схема САУ:
Структурная
схема САУ:
3. Анализ качества нескорректированной САУ.
Анализ САУ на устойчивость проводим используя логарифмиче ский критерий Найквиста. Для этого строим ЛЧХ нескорректированной системы. Её передаточная функция имеет вид:
![]()
![]()
ЛАХ нескорректированной системы имеет вид:
![]()
ЛФХ нескорректированной системы имеет вид:
![]()
Частоты сопряжения:
![]()
![]()
![]()
![]()
T1 = 1.769; KН = 7,847;
T2 = 0.439; 20LgKН = 17.894
При анализе построенных LН() и н() видим, что нескорректированная система является устойчивой, т.к. н() пересекает -1800 (фаза выходного сигнала поворачивается на 1800) позже чем LН() пересекает ось частот (стр 9).
При анализе переходного процесса нескорректированной сискемы (см. стр 10) видим, что переходный процесс монотонный с возрастающей во времени амплитудой колебаний. Переходный процесс устойчивый, система со временем стабилизируется, но установившееся значение выходной координаты далеко от необходимого значения. Время регулирование слишком велико.
Приходим к решению о необходимости коррекции САУ путем введения корректирующего устройства (КУ).
4. Синтез САУ.
В нашем случае система уже является устойчивой, поэтому наше корректирующее устройство будет усилителем. Передаточная функция усилителя имеет вид :
Wу(p) = Kу, где
Ку – коэффициент передачи усилителя. Ищем его из условия:
![]() где
где
![]() статическая
ошибка регулирования замкнутой системы.
статическая
ошибка регулирования замкнутой системы.
Принимаем
![]() .
.
![]() статическая
ошибка регулирования разомкнутой
системы.
статическая
ошибка регулирования разомкнутой
системы.
![]() складывается из ошибок системы, т.е:
складывается из ошибок системы, т.е:
![]()
![]() .
.
Найдем Крс:
![]()
![]()
![]()
5.Анализ качества скорректированной САУ.
Для анализа качества скорректированной САУ, строим ЛЧХ скорректированной системы. (стр.12). Из графиков видно, что запасы устойчивости составляют:
-
по фазе
![]()
-
по амплитуде
что удовлетворяет заданным условиям.
= 0% -перерегулирование;
= 1 – колебательность системы;
tП = 25с.
Делая вывод о качестве скорректированной САУ можно сказать, что система вполне работоспособна, устойчива (имеет запасы устойчивости по фазе и амплитуде) (стр.13).
6. Теническая реализация корректирующего устройства.
Корректирующее устройство представляет собой операйионный усилитель:
К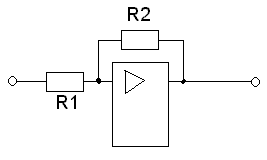
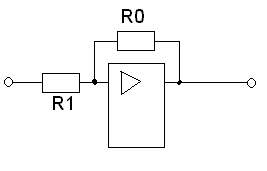 КУ
= 3,1; ККУ = R0/R1;
КУ
= 3,1; ККУ = R0/R1;
R1=100 кОм; R0 = 3.1 мОм.
7. Анализ наблюдаемости и управляемости системы.
![]()
![]() ,
отсюда получим:
,
отсюда получим:
![]()
![]()
![]()
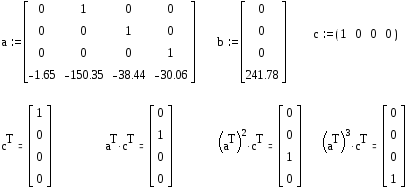
![]() ,
n=4
,
n=4

Система вполне наблюдаема, т.к. rank(v) = n.
![]()
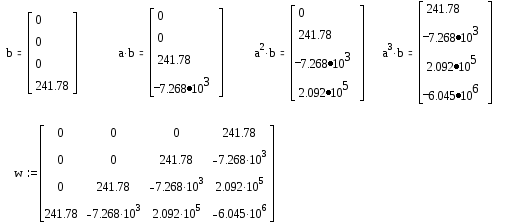 ,
n=4.
,
n=4.
rank(w)=1
Система не вполне управляема, т.к. rank(w)n.
Заключение.
В данной работе была спроектирована система автоматического управления температурой в области резания. Выбранный и использованный в проектировании метод с использованием ЛЧХ оказался очень удобным благодаря своей простоте, наглядности и точности, что позволило сравнительно легко провести анализ и синтез САУ. Мы получили систему, отвечающую всем поставленным требованиям, следовательно поставленная задача выполнена.
Список литературы:
-
Бесекерский В.А. «Сборник задач по теории автоматического регулирования и управления» - М.: Наука, 1978г.
-
Топчеев Ю.И. «Атлас для проектирования систем автоматического регулирования» - М.: Машиностроение, 1989г.
-
«Теория автоматического управления» под ред. Проф. А.В. Нетушила –М.: Высшая школа, 1976г.