

2. Выбор (синтез) типов и параметров регуляторов, обеспечивающих оптимум в системе.
Выбор регуляторов будем производить
из условий устойчивости и качества
работы САУ как системы с подчиненным
регулированием координат [1,3]. Для этого
составленную расчетную схему рис.2
эквивалентно преобразуем так, чтобы
явно проявлялась структурно подчиненность
контуров. Известно, что устойчивость и
свободные движения САУ не зависят от
входных воздействий [1]. Соответственно
выбор регуляторов будем производить
при отсутствии возмущения, т.е. при
![]() .
Тогда расчетная схема САУ примет вид
рис.3.
.
Тогда расчетная схема САУ примет вид
рис.3.
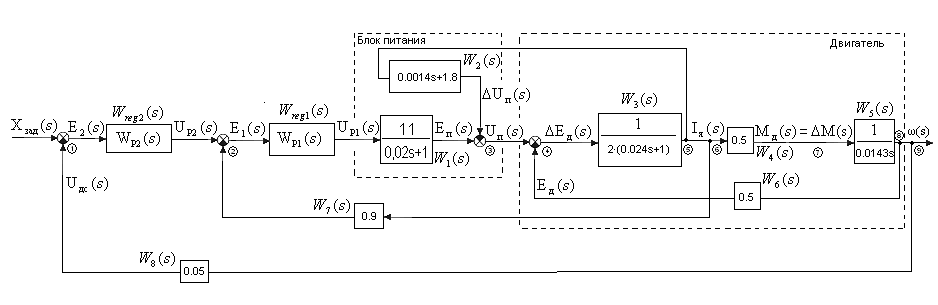 Рис.3
Структурная схема САУ при
Рис.3
Структурная схема САУ при![]() .
.
Структурная схема САУ рис.3 имеется много пересекающихся связей, упростим топологию этой схемы, производя эквивалентные преобразования [1]. Перенесем эквивалентно сумматор 3 через сумматор 4 в прямом направлении и получим эквивалентную расчетную структурную схему САУ рис.4.
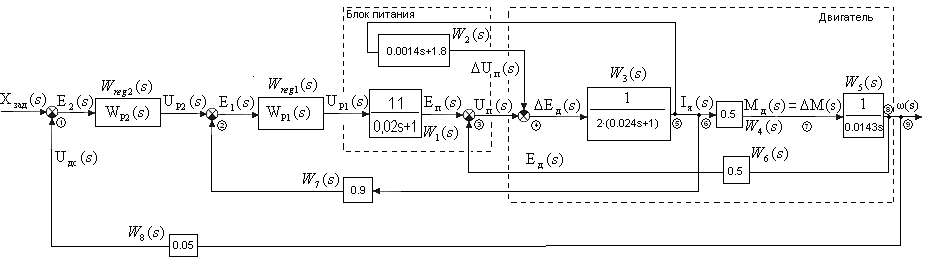
Рис.4 Структурная схема САУ при эквивалентном переносе сумматора 3 чере4 в прямом направлении.
При эквивалентном структурном
преобразовании от рис.3 к рис.4 были
потеряны физические координаты
![]() ,
,![]() .
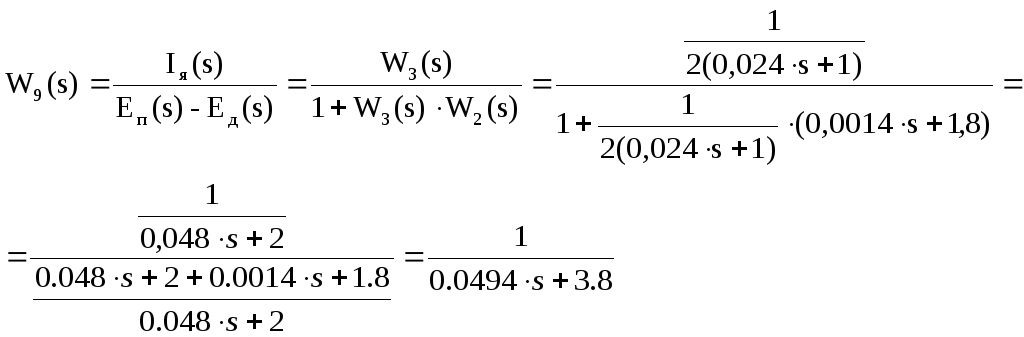
Но анализ схемы рис.4 показывает, что
звено
.
Но анализ схемы рис.4 показывает, что
звено![]() охвачено отрицательной обратной связью
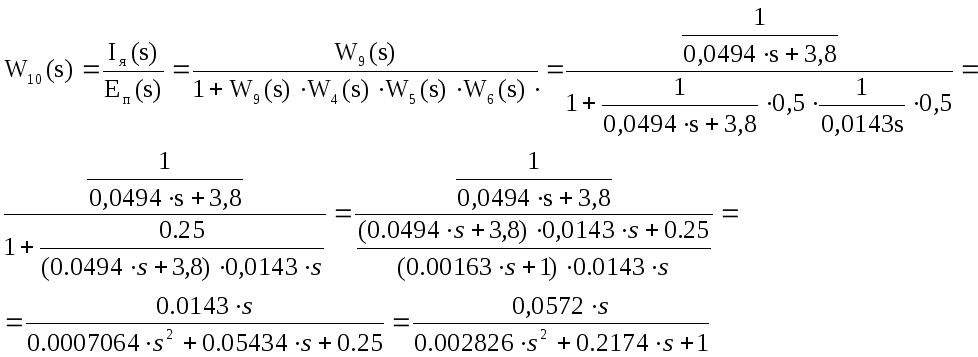
охвачено отрицательной обратной связью![]() и для них можно записать эквивалентную
общую передаточную функцию
и для них можно записать эквивалентную
общую передаточную функцию
![]() .
В звене
.
В звене
![]() эквивалентно учитываются внутренние
параметры двигателя
эквивалентно учитываются внутренние
параметры двигателя![]() и
и![]() и внутренние параметры источника питания
и внутренние параметры источника питания![]() и
и![]() ,
поэтому по эквивалентной структурной
схеме рис.5 считаем, что на идеализированный
двигатель (
,
поэтому по эквивалентной структурной
схеме рис.5 считаем, что на идеализированный
двигатель (![]() ,
активное сопротивление и индуктивность
преобразователя приведены к двигателю)
подается ЭДС
,
активное сопротивление и индуктивность
преобразователя приведены к двигателю)
подается ЭДС![]() ,
а не напряжение
,
а не напряжение![]() .
.
![]()
(1)
В результате получится эквивалентная структурная схема рис.5.
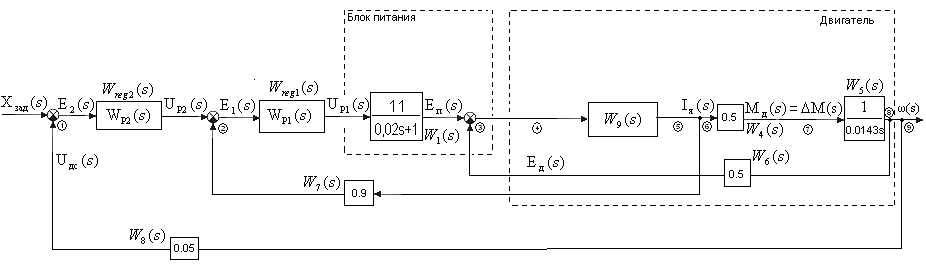
Рис.5 Эквивалентная структурная схема САУ.
В эквивалентной расчетной схеме рис.5 перенесем эквивалентно узел ветвления 8 против направления распространения сигнала в точку 5 и получим новую эквивалентную структурную схему рис.6.
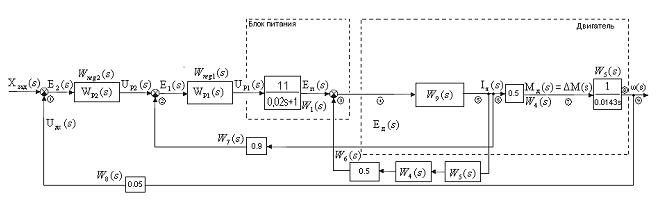
Рис.6 Эквивалентная структурная схема САУ.
Анализ САУ рис.6 показывает, что звено
![]() охвачено отрицательной обратной связью
из последовательно включенных звеньев
охвачено отрицательной обратной связью
из последовательно включенных звеньев![]() .
Введем для этой части эквивалентное
звено и обозначим его как
.
Введем для этой части эквивалентное
звено и обозначим его как![]() ,
его передаточная функция будет равна:
,
его передаточная функция будет равна:
(2)
Знаменатель передаточной
функции (2) показывает, что имеется звено
второго порядка [1]. Определим это
колебательное звено вида
![]() если
если![]() или инерционное звено второго порядка
если
или инерционное звено второго порядка
если![]() вида
вида![]() ?
?
Для этого составим систему алгебраических уравнений приравнивая соответствующие члены:
![]()
Решим эту систему алгебраических уравнений.
Произведем подстановку из одного уравнения в другое:
![]()
![]()
В результате получили
алгебраическое уравнение второго
порядка относительно
![]() .
.
![]()
Решение которого имеет вид:

Откуда находим
![]() ,
которые и были подставлены в выражение
(2)
,
которые и были подставлены в выражение
(2)
![]()
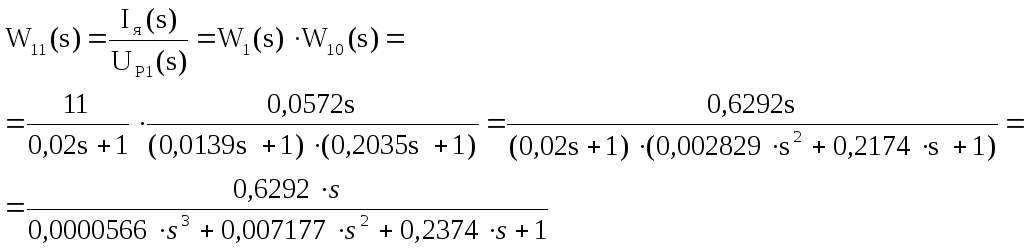
После ввода в рис.6 передаточной функции
![]() эквивалентная структурная схема САУ
примет вид рис.7:
эквивалентная структурная схема САУ
примет вид рис.7:
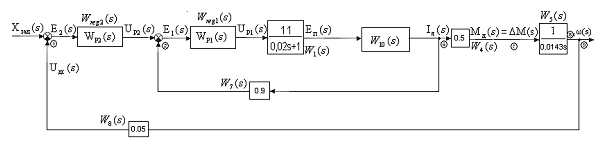
Рис.7 Эквивалентная структурная схема САУ.
Введем новые передаточные функции:
 (3)
(3)
![]() (4)
(4)
И получим эквивалентную расчетную схему рис.8, где четко видна подчиненность контуров управления.

Рис.8 Эквивалентная расчетная схема САУ для выбора регуляторов.
По схеме рис.8 и будем выбирать требуемые регуляторы, используя логарифмические частотные методы синтеза корректирующих устройств САУ [1].
Наличие подготовленного материала рис.8 и значений передаточных функций (1÷4) позволяют приступить к синтезу (выбору) структуры и параметров регуляторов. Задача эта трудно формализуемая и, как правило, решается приближено. Воспользуемся методикой синтеза последовательных корректирующих звеньев [1 стр.440÷450] и[3] с методикой осмысленного перебора регулятора до приближения ЛАЧХ разомкнутой системы к желаемой ЛАЧХ.
Известно что по ЛАЧХ разомкнутой системы
можно судить о времени переходного
процесса замкнутой системы [1] и,
следовательно, задаваясь желаемой
частотой среза
![]() задаём требуемое быстродействие систем.
Также же известно, что если желаемая
ЛАЧХ проходит через частоту среза под
наклоном -20дб/дек не менее чем по полдекады
вправо и влево, то в замкнутой системе
у переходных процессов перерегулирование
будет менее 18% (то есть переходные
процессы будут удовлетворительными).
Воспользуемся этими сведениями и,
изменяя параметры регулятора, будем
подгонять ЛАЧХ разомкнутой системы под
желаемую.
задаём требуемое быстродействие систем.
Также же известно, что если желаемая
ЛАЧХ проходит через частоту среза под
наклоном -20дб/дек не менее чем по полдекады
вправо и влево, то в замкнутой системе
у переходных процессов перерегулирование
будет менее 18% (то есть переходные
процессы будут удовлетворительными).
Воспользуемся этими сведениями и,
изменяя параметры регулятора, будем
подгонять ЛАЧХ разомкнутой системы под
желаемую.
Строить асимптотические ЛАЧХ типовых звеньев, как известно просто да и ЛФЧХ не представляет сложности строить с использованием номограмм. Но лучше автоматизировать этот процесс с использованием инструментов компьютерных инструментов в среде MatLAB[6].
Следует иметь ввиду следующие соотношения, справедливые для коррекции в нашем случае.
![]() (5)
(5)
![]() (6)
(6)
Для минимально фазовых систем по ЛАЧХ однозначно определяется ЛФЧХ. Тем не менее для удобства работы одновременно строятся в одном частотном масштабе ЛАЧХ и ЛФЧХ.
Однако в наше время удобнее конечно автоматизировать построение ЛЧХ в инструментах MATLABразделControlSystemToolbox(CST).
Введем в терминах [3] понятие объекта управления внутреннего контура управления как:
![]()
 (7)
(7)
то есть представим расчетную схему рис.8 в виде эквивалентно схемы рис.9.
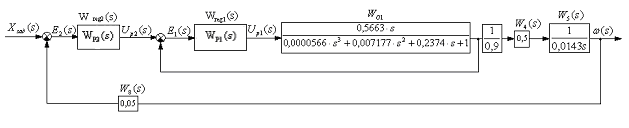
Рис.9 Эквивалентная расчетная схема САУ для выбора первого регулятора.
Задача выбора регулятора
![]() значительно упростится, если передаточную
функцию объекта управления внутреннего
контура
значительно упростится, если передаточную
функцию объекта управления внутреннего
контура![]() упростить,
объединяя инерционные звенья с малыми
постоянными времени и отбросить (не
учитывать) малый коэффициент 0,002829 и
получим более простое приближенное
выражение первой части объекта. Упрошенное
(приближенное) выражение будем отмечать
правым индексомz:
упростить,
объединяя инерционные звенья с малыми
постоянными времени и отбросить (не
учитывать) малый коэффициент 0,002829 и
получим более простое приближенное
выражение первой части объекта. Упрошенное
(приближенное) выражение будем отмечать
правым индексомz:
![]() (8)
(8)
Естественно и регулятор будем находить тоже приближенно. Асимптотические ЛАЧХ звена (8) построить легко, но мы уже на этом этапе для облегчения синтеза (нахождения) регуляторов воспользовались инструментами CST. Для этого написали программуCVG66-1/
Работу подбора первого регулятора
проводил в интерактивном режиме.
Задавались приближенной передаточной
функцией регулятора
![]() ,
находили приближенную передаточную
функцию разомкнутой САУ внутреннего
контура
,
находили приближенную передаточную
функцию разомкнутой САУ внутреннего
контура![]() ,
которую методом перебора приближал к
желаемой. Окончательный результат
показан на рис.10. На ЛАЧХ разомкнутой
системы внутреннего контура рис.10 видно,
что частота среза
,
которую методом перебора приближал к
желаемой. Окончательный результат
показан на рис.10. На ЛАЧХ разомкнутой
системы внутреннего контура рис.10 видно,
что частота среза![]() достаточно
высокая для требуемого быстродействия.
Запас по фазе около 100°, а запас по
амплитуде теоретически не ограничен.
достаточно
высокая для требуемого быстродействия.
Запас по фазе около 100°, а запас по
амплитуде теоретически не ограничен.
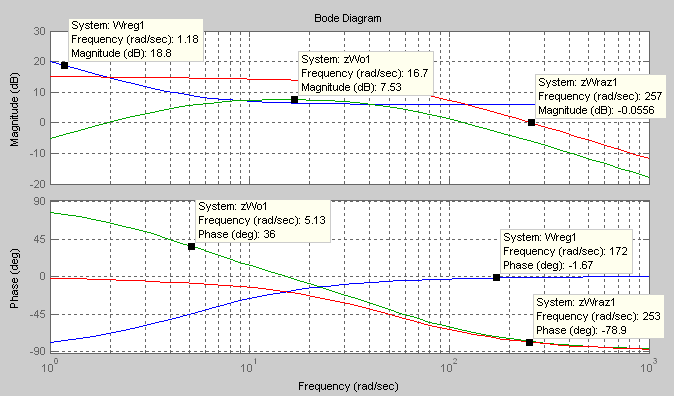
Рис.10 ЛАЧХ и ЛФЧХ внутреннего контура САУ упрощенной системы.
На рис.11 проведены те же расчеты при
точном использовании
![]() .
Ручное (а не компьютерное) построение
даже асимптотических ЛАЧХ и ЛФЧХ
разомкнутой системы вызвало бы
определенные трудности. И хотя было
принято упрощение
.
Ручное (а не компьютерное) построение
даже асимптотических ЛАЧХ и ЛФЧХ
разомкнутой системы вызвало бы
определенные трудности. И хотя было
принято упрощение![]() по объекту это не сказалось существенно
изменение ЛЧХ.
по объекту это не сказалось существенно
изменение ЛЧХ.
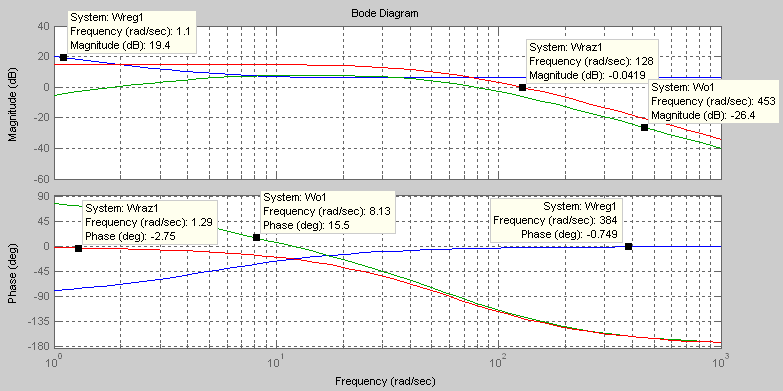
Рис.11 ЛАЧХ и ЛФЧХ внутреннего контура САУ.
Компьютерная поддержка позволила нам сразу построить и переходные функции элементов внутреннего контура управления рис.12. Эти переходные процессы позволяют судить о динамических свойствах (быстродействие) рассматриваемых элементов системы.

Рис.12 Переходные функции элементов внутреннего контура САУ упрощенной системы
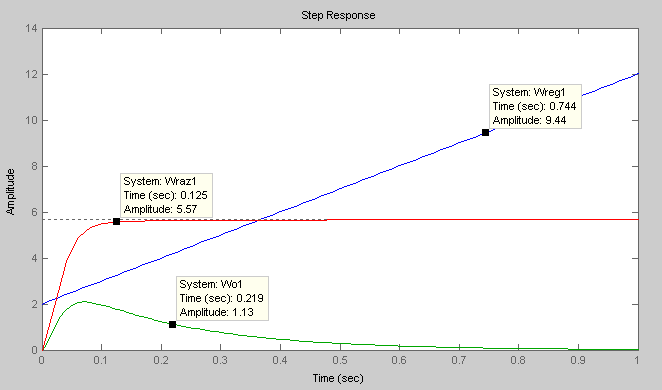 Рис.13
Переходные функции элементов внутреннего
контура САУ расчетной системы.
Рис.13
Переходные функции элементов внутреннего
контура САУ расчетной системы.
В результате был выбран первый регулятор с параметрами:
![]()
Выбор первого регулятора (9) позволяет приступить к выбору второго регулятора, а расчетную схему рис.8 представить в виде рис.13.
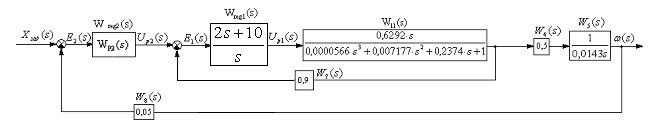
Рис.14 Эквивалентная расчетная схема САУ для выбора второго регулятора.
Структурная схема рис.13 может быть
упрощена до вида рис.14. Где введено
понятие замкнутой передаточной функции
внутреннего контура
![]() ,
в М-файлах будем её обозначать через
,
в М-файлах будем её обозначать через![]() .
.
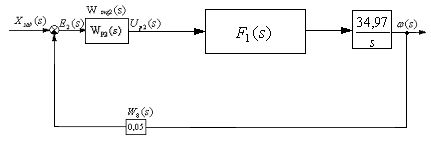
Рис.15 Эквивалентная расчетная схема САУ для выбора второго регулятора.
Звено
![]() входит последовательно в цепь при
определении частотных характеристик
разомкнутой систем внешнего контура.
Однако мы не имеем частотных характеристик
звена
входит последовательно в цепь при
определении частотных характеристик
разомкнутой систем внешнего контура.
Однако мы не имеем частотных характеристик
звена![]() ,
а имеем частотные характеристики двух
видов разомкнутой системы внутреннего
контура ЛАЧХ
,
а имеем частотные характеристики двух
видов разомкнутой системы внутреннего
контура ЛАЧХ
и ЛФЧХ
Проблема перехода от частотных характеристик разомкнутой системы к частотным характеристикам замкнутой системы очень трудоемка. Можно воспользоваться диаграммами замыкания [1] и построить ЛЧХ замкнутой части внутреннего контура системы, а затем просуммировать их с частотными характеристиками остальных звеньев системы рис.14. Как отмечалось задача эта трудоемкая и мы воспользовались инструментами MATLABCSTи расширили М-файл до программыCVG66-2.
На рис.15 показан окончательный вариант
выбора второго регулятора при упрощенном
описании объекта управления
![]() ,
когда параметры второго регулятора
приняты:
,
когда параметры второго регулятора
приняты:
![]()
Как видно у разомкнутой системы частота
среза
![]() ,
а сдвиг по фазе на этой частоте
,
а сдвиг по фазе на этой частоте![]() .
То есть имеет место запас по фазе
.
То есть имеет место запас по фазе![]() ,
а запас по амплитуде теоретически равен
бесконечности
,
а запас по амплитуде теоретически равен
бесконечности
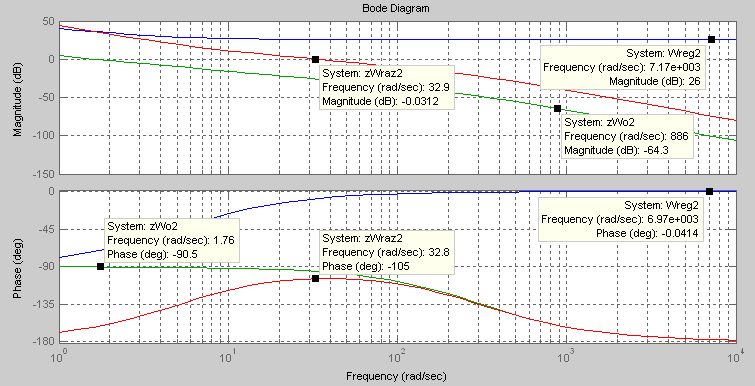
Рис.16 ЛАЧХ и ЛФЧХ внешнего контура САУ упрощенной системы.
В результате выполнения этого пункта предлагается принять регуляторы со следующими параметрами:
![]()
![]()