

Тема : СИНТЕЗ И АНАЛИЗ ДВУХКОНТУРНОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ АНТЕННЫ.
Студент 3-го курса: специальность:
А) Цель работы: Практическое изучение теории построения систем управления и овладение методами синтеза и анализа таких систем.
Б) Упрощенная функционально-принципиальная схема САУ имеет вид:
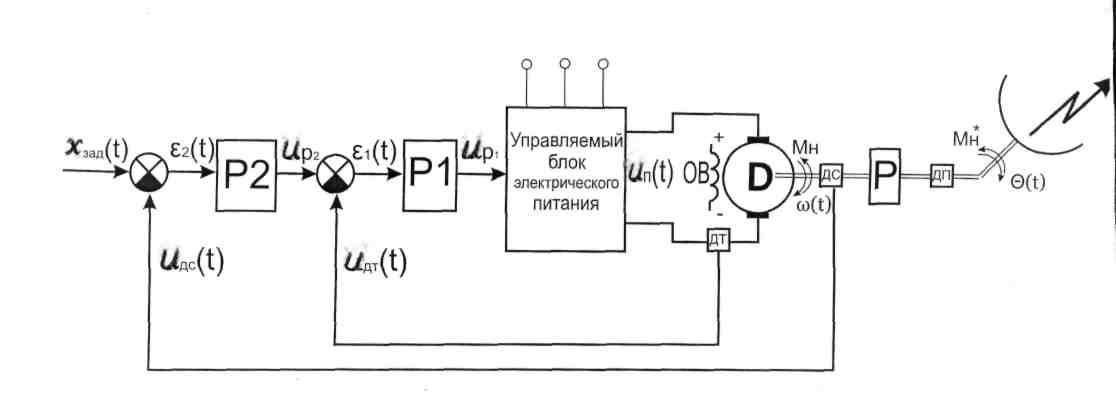
Элементы САУ: Р – редуктор; D – электродвигатель постоянного тока независимого возбуждения; ДС – датчик скорости; ДТ – датчик тока; Р1, Р2 –первый и второй регуляторы.
Координаты (сигналы) САУ: (t) – угол поворота антенны, (t) – скорость вращения электродвигателя, uд(t)=uп(t) – напряжение на выходе управляемого блока питания, uр1(t) и uр1(t) – напряжения на выходах регуляторов, xзад(t) – сигнал задания, Mн(t) – момент нагрузки, приведенный к валу двигателя, uдт(t) – напряжение на выходе датчика тока, uдс(t) – напряжение на выходе датчика скорости, J – приведенный к валу двигателя суммарный момент инерции.
В) Параметры системы Вашего варианта задания:
|
№ варианта |
J [кг.м2] |
Ce[в.сек/рад] |
Rя[ом] |
Тд[сек] |
Кп[1] |
Тп[сек] |
Rп[ом] |
Lп[гн] |
Кдт[в/а] |
Кдп[в/град]
|
|
4 |
0,0143 |
0,50 |
2.00 |
0,024 |
11,0 |
0,020 |
1,80 |
0,0014 |
0,9 |
0,05 |
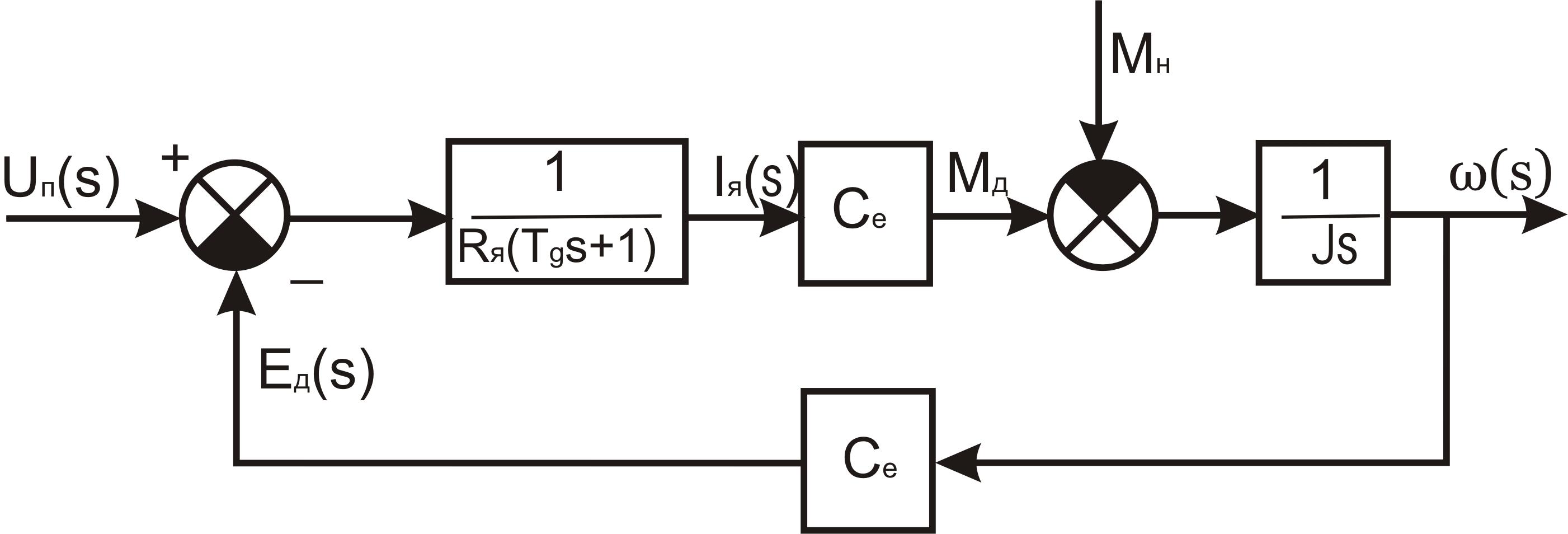
Г) Линеаризованное математическое описание элементов САУ в виде структурных схем и передаточных функции.
–Структурна схема (математическое описание) электродвигателя:
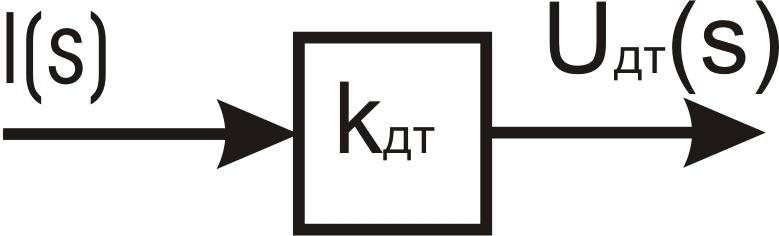
–Структурна схема (математическое описание) датчика тока:
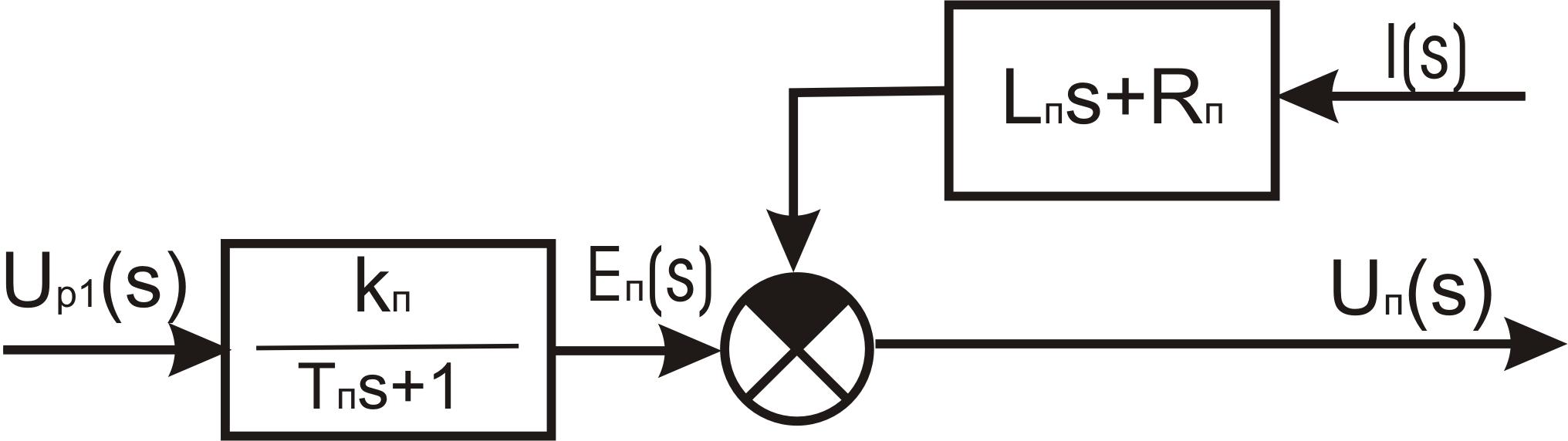
–Структурна схема (математическое описание) управляемого блока питания:
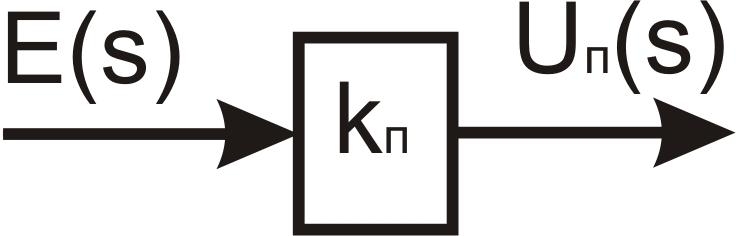
–Структурна схема (математическое описание) П-регулятора:
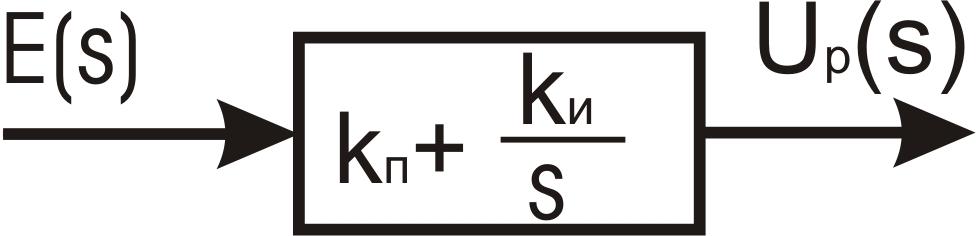
–Структурна схема (математическое описание) ПИ-регулятора:
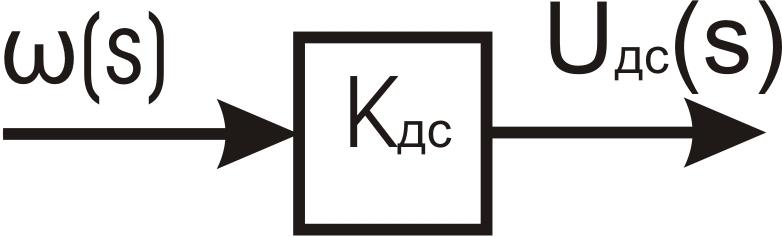
–Структурна схема (математическое описание) датчика скорости:
Д) Учет нелинейностей при описание элементов САУ.
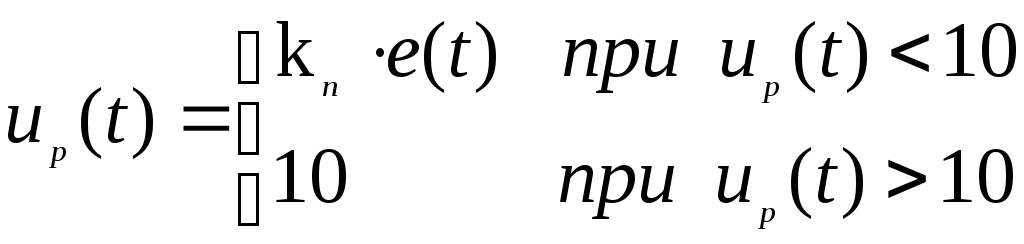
–Математическое описание П-регулятора с учётом насыщения:
–Математическое описание ПИ-регулятора с учётом насыщения:

План задание курсовой работы.
1. Уточнить техническое задание и составить структурную схему САУ Вашего варианта курсовой работы.
2. Для случая линеаризованной САУ выбрать (синтезировать) типы и параметры регуляторов Р1, Р2 обеспечивающих оптимум в системе. Составить полную структурную схему предлагаемой САУ.
3. Построить ЛАЧХ и ЛФЧХ разомкнутой по внешнему контуру предлагаемой САУ и определить запасы устойчивости САУ. При необходимости провести коррекцию регуляторов Р1, Р2 (выбрать более оптимальные настройки регуляторов). Составить полную структурную схему скорректированной САУ.
4. Для скорректированной замкнутой САУ найти основные передаточные функции, а именно:
а)
![]() ; б)
; б)![]() ; в)
; в)![]()
и записать соответствующие дифференциальные уравнения.
5.
Используя передаточные функции или
дифференциальные уравнения п.4 построить
соответствующие переходные функции
![]() замкнутой САУ и прокомментировать
полученные результаты (можно использовать
метод трапециидальных ВЧХ, но лучше и
легче использовать на ПЭВМ инструментыMatLAB
(System
Control
Toolbox)).
замкнутой САУ и прокомментировать
полученные результаты (можно использовать
метод трапециидальных ВЧХ, но лучше и
легче использовать на ПЭВМ инструментыMatLAB
(System
Control
Toolbox)).
6. В инструментах MatLAB (Simulink, System Control Toolbox) составить модель скорректированной САУ для дальнейших всесторонних исследований статических и динамических процессов САУ.
7.
Построить на ПЭВМ переходные процессы
при нулевых начальных условиях и
следующих входных воздействиях
![]() ,
,
![]() и дать сравнительный анализ с п.5.
и дать сравнительный анализ с п.5.
8. Исследовать устойчивость и автоколебания системы с учетом зоны неоднозначности ДТ (параметрами нелинейности задаться самостоятельно).
9.
Найти значение среднеквадратичной
ошибки стабилизации
![]() при наличии помех на входе САУ типа
"белый шум"
при наличии помех на входе САУ типа
"белый шум"
![]() = .
= .
10. Сделать общие выводы сконструированной САУ.
Требования к оформлению курсовой работы.
1. Курсовая работа должна быть выполнена с соблюдением ГОСТов в виде пояснительной записки с проработкой всех пунктов, указанных в задании. Формат записки 203х283мм.
2. Схемы и графики должны быть выполнены четко с соблюдением ГОСТов на миллиметровой бумаге того же формата, что и пояснительная записка.
3. Пояснительная записка должна быть сброшюрована и переплетена в обложку из ватмана.
4. Работа может быть полностью оформлена на ПЭВМ, но автор несет ответственность за представленный материал. Все скопированные или списанные части работы должны иметь ссылки на использованные источники.
5. Работа должна содержать библиографию использованных источников.
P.S. В процессе выполнения курсовой работы исполнителем числовые показатели пунктов задания могут уточняться и изменяться под роспись руководителя проекта.
Задание выдал ________________ /_ ./ 25 сентября 2007 г.
СИНТЕЗ И АНАЛИЗ ДВУХКОНТУРНОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ АНТЕННЫ
0. Введение.
В этой курсовой работе необходимо овладеть методами синтеза и анализа двухконтурной системы стабилизации скорости вращения антенны. А также требуется выбрать типы и параметры регуляторов для достижения технического оптимума в системе и исследовать полученную структурную систему САУ на устойчивость и автоколебания.
I. Уточнение технического задания и структурной схемы сау.
В техническом задании на выполнение курсовой работы по теме “Cинтез и анализ двухконтурной системы стабилизации скорости вращения антенны” вариант №00 даны упрощенная функционально-принципиальная схема САУ, линеаризованное математическое описание элементов этой САУ в виде структурных схем и передаточных функции. Это позволяет нам составить исходную общую структурную схему рассматриваемой линеаризованной САУ при принятых ограничениях рис.1.
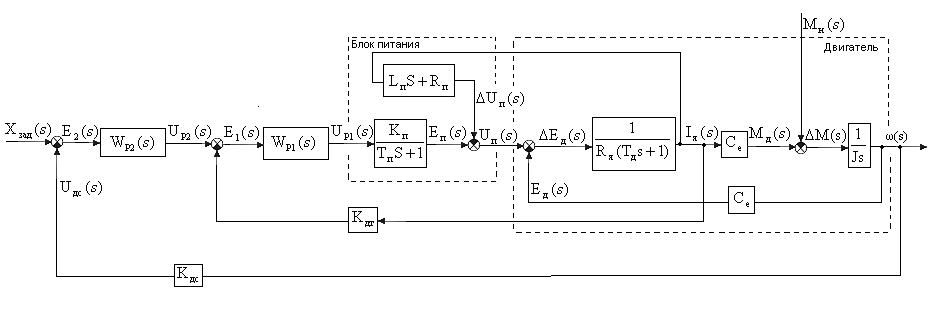
Рис.1 Исходная структурная схема САУ двухконтурной системы стабилизации скорости вращения антенны.
При составлении структурной схемы САУ рис.1 перешел от временных переменных в заданной исходной упрощенной функционально-принципиальной схеме к переменным в Лапласовом пространстве. Соответственно вставил заданные передаточные функции элементов и значения коэффициентов этих передаточных функций согласно варианта задания №00. При выполнении этой работы уточнил понятия принятых переменных в изображениях по Лапласу, а именно:
![]() —
изображение по Лапласу от задающего
сигнала;
—
изображение по Лапласу от задающего
сигнала;
![]() —
изображение по Лапласу от напряжения
датчика скорости;
—
изображение по Лапласу от напряжения
датчика скорости;
![]() —изображение
по Лапласу от рассогласования, поступающего
на второй регулятор;
—изображение
по Лапласу от рассогласования, поступающего
на второй регулятор;
![]() —
изображение по Лапласу от выходного
сигнала второго регулятора;
—
изображение по Лапласу от выходного
сигнала второго регулятора;
![]() —
изображение по Лапласу от напряжения
датчика тока;
—
изображение по Лапласу от напряжения
датчика тока;
![]() —изображение
по Лапласу от рассогласования, поступающего
на первый регулятор;
—изображение
по Лапласу от рассогласования, поступающего
на первый регулятор;
![]() —
изображение по Лапласу от выходного
сигнала первого регулятора;
—
изображение по Лапласу от выходного
сигнала первого регулятора;
![]() —
изображение по Лапласу от ЭДС
преобразователя (блока питании);
—
изображение по Лапласу от ЭДС
преобразователя (блока питании);
![]() —
изображение по Лапласу от падения
напряжения внутри преобразователя;
—
изображение по Лапласу от падения
напряжения внутри преобразователя;
![]() —
изображение по Лапласу от выходного
напряжения преобразователя;
—
изображение по Лапласу от выходного
напряжения преобразователя;
![]() —
изображение по Лапласу от ЭДС
электродвигателя;
—
изображение по Лапласу от ЭДС
электродвигателя;
![]() —
изображение по Лапласу от приращения
ЭДС электродвигателя;
—
изображение по Лапласу от приращения
ЭДС электродвигателя;
![]() —
изображение по Лапласу от тока якоря
электродвигателя;
—
изображение по Лапласу от тока якоря
электродвигателя;
![]() —
изображение по Лапласу от момента
нагрузки на электродвигатель;
—
изображение по Лапласу от момента
нагрузки на электродвигатель;
![]() —
изображение по Лапласу от момента,
развиваемого электродвигателем;
—
изображение по Лапласу от момента,
развиваемого электродвигателем;
![]() —
изображение по Лапласу от избыточного
момента, развиваемого электродвигателем;
—
изображение по Лапласу от избыточного
момента, развиваемого электродвигателем;
![]() —
изображение по Лапласу от скорости,
развиваемой электродвигателем.
—
изображение по Лапласу от скорости,
развиваемой электродвигателем.
Для конкретизации дальнейшей работы пронумеруем все известные звенья, сумматоры и узлы ветвления рис.1 и получим более определенную структурную схему САУ рис.2.
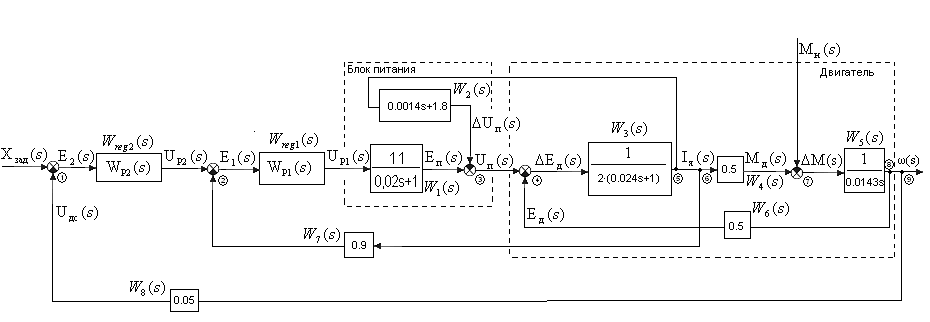
Рис.2 Структурная схема САУ с поименованными звеньями, пронумерованными сумматорами и узлами ветвления.
При выполнении этой работы присвоения имен элементам схемы нельзя одним именем называть разные элементы, что будет приводить к ошибкам, как на уровне ручного счета, так и на уровне машинного моделирования.
Имея структурную схему рис.2 всегда можно четко определить передаточные функции всех звеньев рассматриваемой САУ в принятых обозначениях переменных, а именно:
![]() —
передаточная функция первого регулятора,
как отношение
—
передаточная функция первого регулятора,
как отношение![]() к
к![]() при нулевых начальных условиях.
при нулевых начальных условиях.
В дальнейшем не будем словесно повторять подобные определения для вновь вводимых передаточных функций, а запишем только математические определения:
![]() —
передаточная функция второго регулятора;
—
передаточная функция второго регулятора;
![]() —
передаточная функция идеального
преобразователя;
—
передаточная функция идеального
преобразователя;
![]() — передаточная функция изменения
напряжения преобразователя от тока
якоря (нагрузки);
— передаточная функция изменения
напряжения преобразователя от тока
якоря (нагрузки);
![]() — передаточная функция тока якоря от
изменения ЭДС двигателя;
— передаточная функция тока якоря от
изменения ЭДС двигателя;
![]() —
передаточная функция момента двигателя
от тока якоря;
—
передаточная функция момента двигателя
от тока якоря;
![]() —
передаточная функция скорости двигателя
от изменения момента;
—
передаточная функция скорости двигателя
от изменения момента;
![]() — передаточная функция ЭДС двигателя
от скорости двигателя;
— передаточная функция ЭДС двигателя
от скорости двигателя;
![]() — передаточная функция датчика тока;
— передаточная функция датчика тока;
![]() — передаточная функция датчика скорости.
— передаточная функция датчика скорости.