

2. Общая структурная схема передающей части мп системы тк
Разработка программного обеспечения МП СТК заключается в создании прикладных подпрограмм передачи и приема информации с информационной программой, реализующей управление и сигнализацию с помощью пульта управления через прикладные программы ввода информации с клавиатуры и вывод информации на светодиодный дисплей ПУ и КПУ.
Использую принципы и прикладные подпрограммы приема-передачи информации возможно изменение основной управляющей программы и приспособление СТК для различных задач, так возможно функции управления и принятие решения по телесигнализации и телеуправления возложить на КПУ.
Возможно включение системы телекоммуникации в АСУ. Связь с ЭВМ высшего ранга локальной системы осуществляется в данном случае через БИС КПУ КР580ВВП, имеющей в составе КПУ, реализующего функции последовательного канала.
При управлении до 24 КП возможно применение свободного кода ввода-вывода для подключения принтера для вывода информации о состоянии объектов управления и принятых решениях системы на печать. Свободная память ОЗУ в данном случае используется для массивов данных, выводивших на печать. В данном случае возможно возложение задачи формирования таких массивов на контролируемые пункты.
Для реализации всех этих функций в реального времени используется программируемый интервальный таймер КР580ВП53 который также имеется в составе КПУ.
Структурная схема системы телекоммуникации, с учетом вышеизложенного приведена на рис.1 .


Рис.2. Блок- схема алгоритма подпрограммы выдачи импульса.
3. Алгоритмы и подпрограммы для организации передачи и приема помехозащитной информации.
а) Подпрограмма выдачи импульса определенной длительности.
Для выдачи импульса определенной длительности на линии связи необходимо установить в «1» линию связи, затем после временной задержки сбросить ее. Программная реализация временной задержки использует метод программных циклов, при котором в некоторый рабочий регистр блока РОН загружается число, которое затем в каждом проходе цикла уменьшается на 1. Так продолжается до тех пор, пока содержимое рабочего регистра не станет равным нулю, что интерпретируется как момент выхода из программного цикла. Время задержки при этом определяется числом, загруженным в рабочий регистр, и времен выполнения команд, образующих программный цикл. Схема алгоритма такой программы показана на рис. 2. Схема алгоритма предполагает, что занесение число в рабочий регистр осуществляется до вызова этой подпрограммы. Таким образом рабочий регистр будет являться входным параметром данной подпрограммы. Программа имеет символическое имя IMP и в случае вызова ее основной управляющей программы по команде СALL IMP должна завершаться командной возврата РЕТ. Текст программы, отображающей структуру алгоритма, показанного на рис.2, имеет следующий вид:
Подпрограмма IMP
IMP: MVI A,8ØH; установка линии связи на вывод
OUT F3H;
(LDA) MVT 212ØH; единица – на линии связи
OUT PORT;
CONT: DCR D; уменьшить на «1» содержимое Д цикл если Д≠0
JNZ COUNT;
(MVI) LDA A, Ø ØH; «нуль» - на линии связи, если Д=0
OUT PORT;
MVI C, 5ØH; установка счетчика
CON: DCR C; счетчик
JNZ CON; цикл, если С≠0
RET; возврат в основную программу, если С=0
Установка линии связи на вывод осуществляется с помощью специального управляющего слова (MODE SELEKTION), которое назначает режим работы каждому каналу порта ввода-вывода информации. Регистр управляющего слова 7-разрядный. Запись в него осуществляется только при передаче в программируемый периферийный адаптер (ППА) управляющего слова с Д7=I (признак слова MS), которое определяет режим работы каждого канала ВВ в соответствии с форматом Рис.3.
При записи нового управляющего слова все буферные регистры портов устанавливают в «0».
Адаптер подтверждает три режима работы портов:
Режим «0»- однонаправленный ВВ без квитирования (применим к любому из трех портов);
Режим «1» - однонаправленный ВВ с квитированием ( применим к портом А и С);
Режим «2»- двухнаправленный ВВ ( допускается только для порта А.)
Таким образом для установки всех портов на вывод необходимо в регистр управляющего слова (д59) ГУС подать 8ØН.
Длительность импульса определяется числом загружаемого в регистр Д. По окончание импульса реализована задержка длительностью определяемой количеством проходов цикла равному 5ØН в целях подготовки принимающего устройства к приему следующего импульса.
|
Управление группой А |
Управления группой В |
РС3 – РСО
1-ввод, 0-вывод










РВ7-РВО
1-ввод, 0-вывод
Выбор режима РВ7-РБО 0- режим 0, 1- режим
1

РС7-РС4
1-ввод, 0-вывод

РА7-РА0
1Х-ввод, 0-вывод

Выбор режима РА7-РА0 00-режим 0, 01-режим
1Х-режим 2

Признак слова
MS (MODE SELECTION)

Рис.3. Назначение вывода регистра управляющего слова
б) основные принципы приема и передачи информации через линию связи.
В данной МП СТК принято кодировать передаваемой информации широтно- импульсной модуляцией, т.е. любому сообщения соответствует определенная длительность кодового импульса. Обмен информации осуществляется байтами. Передача осуществляется с информационной обратной связью. Для повышения скорости используется помехоустойчивый код с обнаружением ошибок, в частности, код Хемминга, т.к. это исключает повторную передачу. Для реализации оказанного вводятся следующие сообщения6
1. Начало сообщения (байта);
2. Конец байта;
3. Логическая «1»;
4. Логический «0»;
5. Стирание;
6. Продолжение (подтверждение)
7. Ошибка.
Передачи осуществляется следующим образом:
С пульта управления сначала передаются информационный байт, затем контрольный байт, содержащий контрольные разряды кода Хэмминга. Приемное устройство (контролируемый пункт) принимает эти два байта, производит декодирование кодом Хэмминга. Здесь возможны два случая:
а) Обнаружены две или менее двух, или вообще без ошибок. При обнаружении ошибок происходит их исправление и осуществляется передача принятого байта. Передающее устройство получив эту информацию, сравнивает с переданным байтом. Если сообщения совпадают, то формируется сигнал «подтверждение». Принимающее устройство, получив это сообщение, заканчивает прием байта.
Если сообщения не совпадают, тогда передача повторяется. Прием -передачи информации осуществляется только по инициативе передающей устройства, т.е. в пункте управления в целях исключения встречной передачи.
б) Обнаружены более двух ошибок в переданной информации. В этом случае приемное устройство формирует сообщение «ошибка». Передающее устройство, получив это сообщение, начинает передачу заново.
в) Подпрограмма передачи физического байта.
Каждое сообщение кодируется числом проходов цикла подпрограммы IMP. Присвоим каждому сообщению это число:
Логический «0» - 28Д=ICH
Логические «1» -56Д=38Н
Начало байта -84Д=54Н
Конец байта -112Д=70Н
Подтверждение -140Д=8СН
Стирание -168Д=А8Н
Ошибка передачи -196Д=С4Н
В начало передачи байта передается сообщение «начало байта», затем сам байт, начиная с младшего разряда, после чего передается сообщение «конец байта». При переходе на подпрограмму передачи физического байта необходимо организовать входной параметр- ячейка памяти, содержимое которой определять передаваемый байт. В данном случае входным параметром определено ячейка с адресом 2102Н. Здесь необходимо также организовать цикл, число проходов которого будет определять число не передаваемых разрядов, равное.
8. Для определения передаваемого разряда использован сдвиг вправо с участием признака переноса. При сдвиге вся информация байта начиная с младшего разряда выполняется в признаке и реализуется переход по условию переноса (Carry). Выдача импульса осуществляется с помощью подпрограммы выдачи импульса IMP. С учетом вышеизложенных составим текст подпрограммы:
SAO: MVI
CALL IMP;
MVI B,8H;
LDA 21Ø2;
BEG RAR
JNC SN;
MVI
JMP PROD;
SN MVI
PROD: STA 21Ø3H;
CALL IMP;
LDA 21Ø3H;
DCR B;
JNZ BEG;
MVI D,7ØH;
CALL IMP;
RET ;
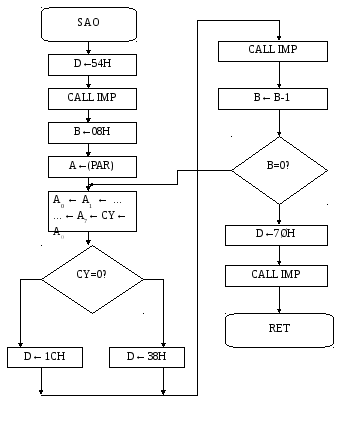
Рис. 4. Блок-схема алгоритма подпрограммы передачи физического байта.
В целом для организации приема и передачи информации (выбор адреса КП, режима ТУ-ТС, посылки команды ТУ) необходимо описать следующие блоки- алгоритмы и подпрограммы:
- подпрограмма передачи информации через линию связи;
- подпрограмма выдачи импульса определенной длительности;
- подпрограммы кодирования информации кодом Хэмминга;
- подпрограммы передачи физического байта;
- подпрограммы передачи байта с информационной обратной связью, помехоустойчивым кодом Хэмминга;
- подпрограммы ввода информации с клавиатуры;
- подпрограммы приема информационного байта;
- подпрограммы декодирования информационного байта;
- подпрограмма приема информационного байта с подтверждением;
- подпрограммы ввода-вывода на порт и с порта.
Согласно этих подпрограмм составляются общие программы (драйвера) передающей и приемной части СТК, которые для конкретных случаев приведены на следующей лабораторной работе.