

Построение кинематических диаграмм
Разметка траекторий движения точек механизма и планы скоростей и ускорений, построенные для восьми положений механизма, дают возможность судить об изменениях перемещений, скоростей и ускорений точек механизма за один оборот.
Для более наглядного выяснения закономерностей в изменении рассматриваемых кинематических параметров целесообразно результаты выполненного исследования представить в виде графиков, которые носят название кинематических диаграмм или графиков законов движения. В виде примера построим кинематические диаграммы для точки Е механизма, изображенного на рис. 2.
а) Построение графика перемещений (рис. 8)
Выберем
систему координатных осей
![]() —
—![]() ,
в которой по оси ординат будем откладывать
величины перемещений ведомой точки Е
от выбранного начала отсчета на ее
траектории. За начало отсчета можно
принять любую точку на траектории. По
оси абсцисс откладываем в выбранном
масштабе интервалы времени, соответствующие
равным углам поворота кривошипа.
,
в которой по оси ординат будем откладывать
величины перемещений ведомой точки Е
от выбранного начала отсчета на ее
траектории. За начало отсчета можно
принять любую точку на траектории. По
оси абсцисс откладываем в выбранном
масштабе интервалы времени, соответствующие
равным углам поворота кривошипа.
Время одного оборота кривошипа
t
=
![]() ,
(53)
,
(53)
где п — число оборотов кривошипа в минуту.
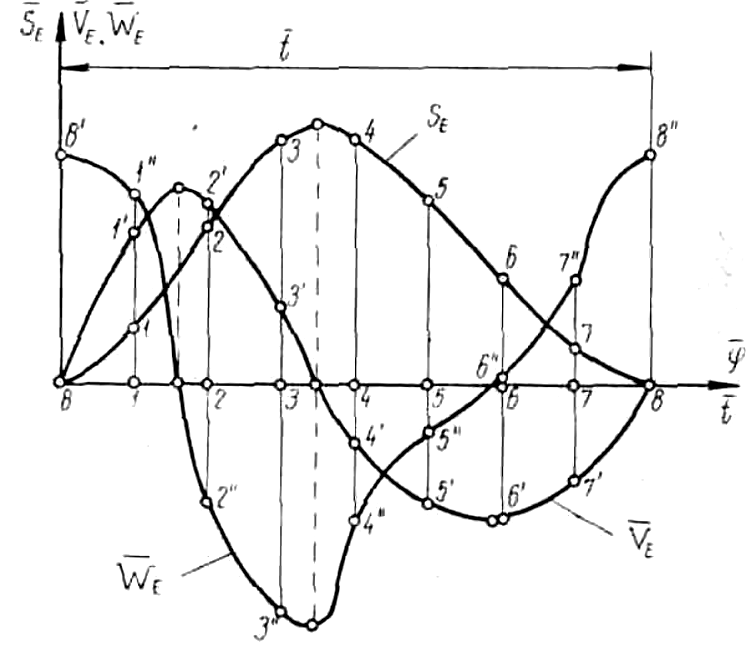
Рис.8. Графики перемещений, скоростей и ускорений ведомой точки E.
Отложим по оси абсцисс время одного оборота в виде отрезка .
Масштаб времени
![]() =
=
![]() .
(54)
.
(54)
Разделим
отрезок t
на восемь равных частей:
![]() ...,
которые будут соответствовать равным
углам поворота кривошипа на плане
положений механизма (рис. 2). Примем за
начало отсчета перемещений точки
Е ее крайнее
правое положение E8.
Этому
положению точки Е
на линии движения х—х
соответствует начало координат графика
перемещений. Через точку 1
оси абсцисс проведем вертикальную линию
и отложим на ней отрезок 1
— 1, равный
перемещению
...,
которые будут соответствовать равным
углам поворота кривошипа на плане
положений механизма (рис. 2). Примем за
начало отсчета перемещений точки
Е ее крайнее
правое положение E8.
Этому
положению точки Е
на линии движения х—х
соответствует начало координат графика
перемещений. Через точку 1
оси абсцисс проведем вертикальную линию
и отложим на ней отрезок 1
— 1, равный
перемещению
![]() точки Е
за время
точки Е
за время
![]() t,
т. е. за время перемещения точки А
из положения А8
в положение А1.
На вертикали, проходящей через точку 2
оси абсцисс, отложим отрезок 2—2,
отвечающий перемещению
t,
т. е. за время перемещения точки А
из положения А8
в положение А1.
На вертикали, проходящей через точку 2
оси абсцисс, отложим отрезок 2—2,
отвечающий перемещению
![]() и т. д. Соединив найденные точки 8,
1, 2 и т. д.
плавной линией, получим кривую перемещений
точки Е.
и т. д. Соединив найденные точки 8,
1, 2 и т. д.
плавной линией, получим кривую перемещений
точки Е.
Может случиться, что положение E8 точки Е механизма не будет являться на самом деле ее крайним правым положением, а при переходе точки А из положения A7 в положение A8 точка Е, перемещаясь по своей траектории х—х из положения Е7 в положение Е8, займет некоторое положение Е* правее точки E8. Нужно суметь проверить, является ли крайнее положение данной точки на своей траектории, выявленное в результате построения плана положений механизма, действительным крайним положением.
Определение действительных крайних положений точки механизма покажем на примерах.
Возьмем кривошипно-шатунный механизм (рис. 9). Найдем крайние положения точки В механизма, перемещающейся по линии х—х. Точка В займет крайнее правое положение на своей траектории тогда, когда кривошип 01А и шатун АВ расположатся по одной прямой линии. Обозначив 01А=r и АВ == l, засечем линию х—х радиусом R1
из точки О1, где R1 = r + l. Получим точку В*, которая и будет являться крайним правым положением точки В. Соединив точки О1 и В* прямой линией, будем иметь точку пересечения ее с окружностью радиуса 01А-=r. Эта точка пересечения определит положение А* точки А на ее траектории, когда точка В будет находиться в крайнем правом положении.
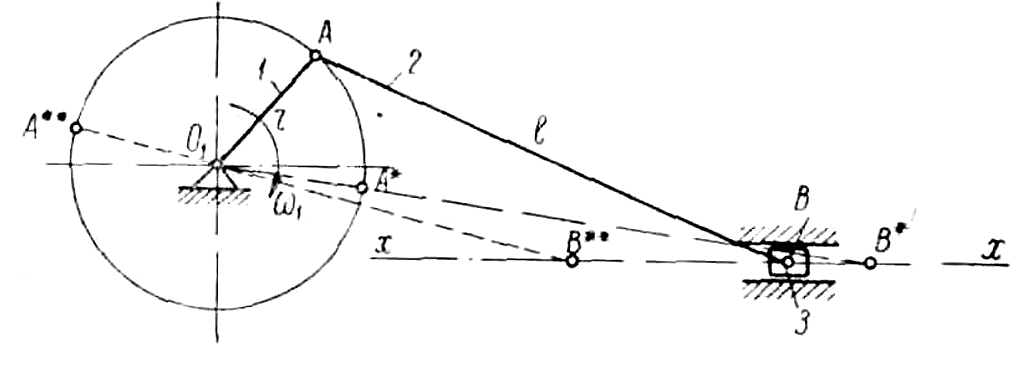
Рис.9. Определение крайних положений точки В кривошипно-шатунного механизма.
Крайнее левое положение точки В найдем, если засечем из точки O1 линию х—х радиусом R2 = l—r. Получим точку В**. Соединив точки В** и O1 прямой и продолжив ее за точку O1 до пересечения с окружностью радиуса r, найдем положение А** точки А, отвечающее крайнему левому положению точки В. В данном случае, как это понятно из чертежа, кривошип O1А и шатун АВ располагаются по одной прямой.
Аналогично находятся крайние положения точки В в кривошипно-коромысловом механизме (рис. 10). Засекая из точки O1 траекторию b—b точки В радиусами R1 = r + l и Р2.=l—r, находим положения В* и В** точки В, являющиеся ее искомыми крайними положениями. И в этом случае кривошип O1А и шатун АВ располагаются по одной прямой в крайних положениях механизма. Соединив точки O1 и В* прямой линией, найдем положение A*. Соединив точки O1 и В** прямой и продолжив ее до пересечения с окружностью радиуса r, найдем положение A** точки А.
Рассмотрим теперь механизм, изображенный на рис. 11. Требуется найти крайние положения точки D на траектории ее движения х—х. Точка D соединена шатуном 4 с точкой С, перемещающейся по траектории g—g в направлении, указанном стрелками. Для определения крайних положений точки D метод засечек радиусами R1 и R2, использованный на рис. 9 и 10, здесь неприемлем. Решению вопроса помогает следующее общее правило.
Если ведомая точка D занимает крайнее положение на своей траектории, то звено, соединяющее ее с ведущей точкой (в данном случае с точкой С), имеет положение нормали к траектории ведущей точки, т. е. соединяющее звено перпендикулярно к касательным I — I и II—II, проведенным к траектории g—g в точках С* и С**,
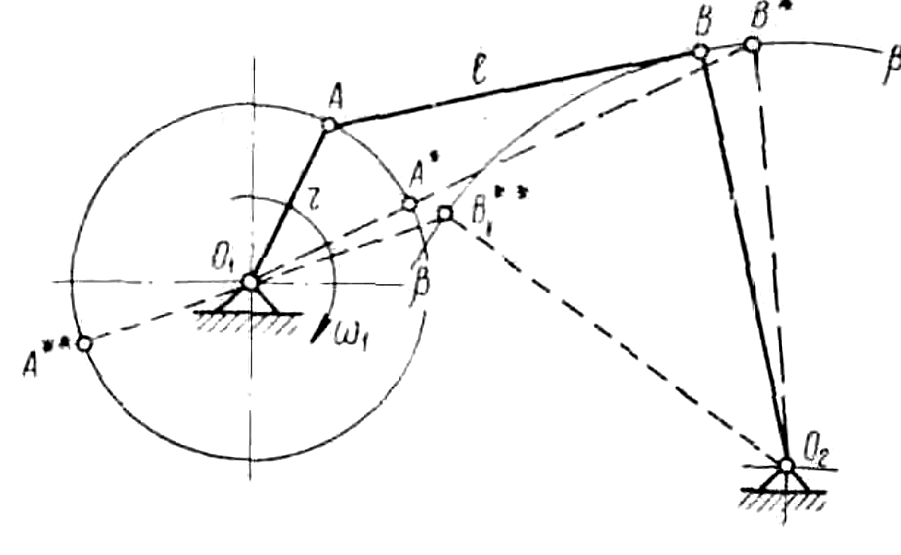
Рис.10. Определение крайних положений точки В кривошипно-коромыслового механизма.
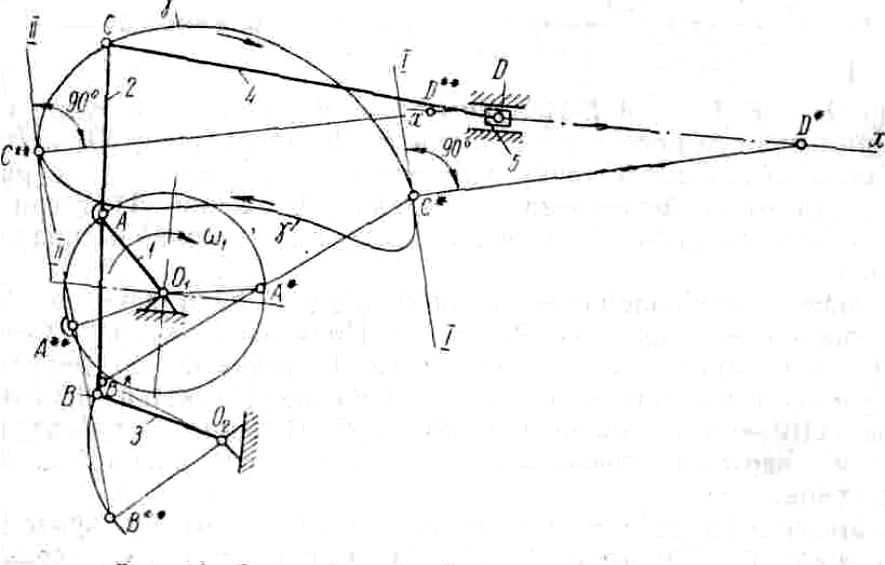
Рис.11. Определение крайних положений точки D шестизвенного плоского шарнирного механизма.
соответствующих крайним положениям точки D (рис. 11). В этом случае ее скорость движения
VD = 0.
Из равенства
![]() .
.
Отсюда
![]()
т. е. скорость VC полюса С и относительная скорость VDC представляют собой два равных параллельных вектора, направленных в противоположные стороны.
Вектор относительной скорости VDC точки D при вращении ее вокруг полюса С всегда перпендикулярен радиусу вращения, т. е. данному положению шатуна CD. Следовательно, и вектор VC абсолютной скорости точки С, направленный всегда по касательной к ее траектории движения g—g, в крайних положениях точки D должен быть перпендикулярен шатуну CD. Таким образом доказано, что шатун CD в крайних положениях точки D всегда должен совпадать с нормалью к траектории движения точки С или, другими словами, касательная /—/ (или //—//) к траектории g—g точки С должна быть одновременно перпендикуляром к шатуну CD в крайних положениях точки D. Отсюда можно рекомендовать следующий порядок определения крайних положений, ведомой точки в подобных случаях. Построив план положений механизма, выявив и разметив траектории движения всех шарнирных точек, глазомерно определить участки на траектории g—g, отвечающие крайним положениям ведомой точки D, и сделав ряд засечек линии х—х радиусом CD из различных точек на этих участках, попытаться найти крайние положения D* и D**. Для проверки правильности определения точек D* и D** следует провести касательные /—/ и //—// в точках С* и С** к траектории g—g. Если проведенные касательные перпендикулярны положениям шатуна C*D* и C**D**, то крайние положения ведомой точки D найдены правильно.
б) Построение графика скорости
В той же системе координат (рис. 8) построим график скорости точки Е. Для этого на ординатах, проходящих через точки 8, 1, 2,... горизонтальной оси, отложим значения скоростей точки Е, взятые с планов скоростей соответствующих положений механизма. При нанесении отрезков с планов скоростей на график необходимо учитывать направление скорости в каждом положении механизма. В нашем примере отрезки , направленные на планах скоростей налево от полюса, считаем положительными, а направо от полюса — отрицательными. На графике скоростей положительные значения скорости отложены вверх от оси времени, а отрицательные — вниз. Соединив полученные точки 8, 1’, 2',... плавной кривой, получим график скорости точки Е, характеризующий изменение ее скорости за время, соответствующее одному обороту кривошипа.
При проведении кривой скорости необходимо следить за тем, чтобы максимальные ординаты ее соответствовали точкам перегиба графика перемещений, а нулевые значения скорости соответствовали бы наименьшим и наибольшим ординатам графика перемещений.
в) Построение графика ускорения
В выбранной ранее системе координат построим и график ускорения точки Е. Для этого на ординатах, проходящих через точки 1, 2, 3,... горизонтальной оси, отложим значения ускорений точки Е, взятые с планов ускорений соответствующих положений механизма.
При нанесении отрезков ускорения на график необходимо так же, как и при построении графика скорости, учитывать направление вектора ускорения в каждом положении механизма. В нашем примере отрезки , направленные на планах ускорений влево от полюса, отложены на графике вверх от оси времени, а направленные на планах ускорений вправо от полюса — вниз от оси времени. Полученные точки 8", 1'', 2",... соединим плавной кривой линией, которая будет характеризовать изменение ускорения точки Е за время одного оборота кривошипа. При проведении кривой ускорения необходимо следить за тем, чтобы максимальные ординаты графика ускорения соответствовали точкам перегиба графика скорости, а нулевые значения ускорения отвечали бы экстремальным значениям скорости.