

Порядок выполнения задания
1. Изобразить в выбранном масштабе схему механизма.
2. Определить скорости всех шарнирных точек механизма и угловые скорости звеньев методом построения плана скоростей.
3. Определить скорости всех шарнирных точек механизма угловые скорости звеньев методом мгновенных центров скоростей.
4. Определить ускорения всех шарнирных точек и угловые ускорения звеньев методом построения плана ускорений.
Пример выполнения расчётно-графической работы
Порядок выполнения работы рассмотрим на примере механизма, изображённого на рис.8.
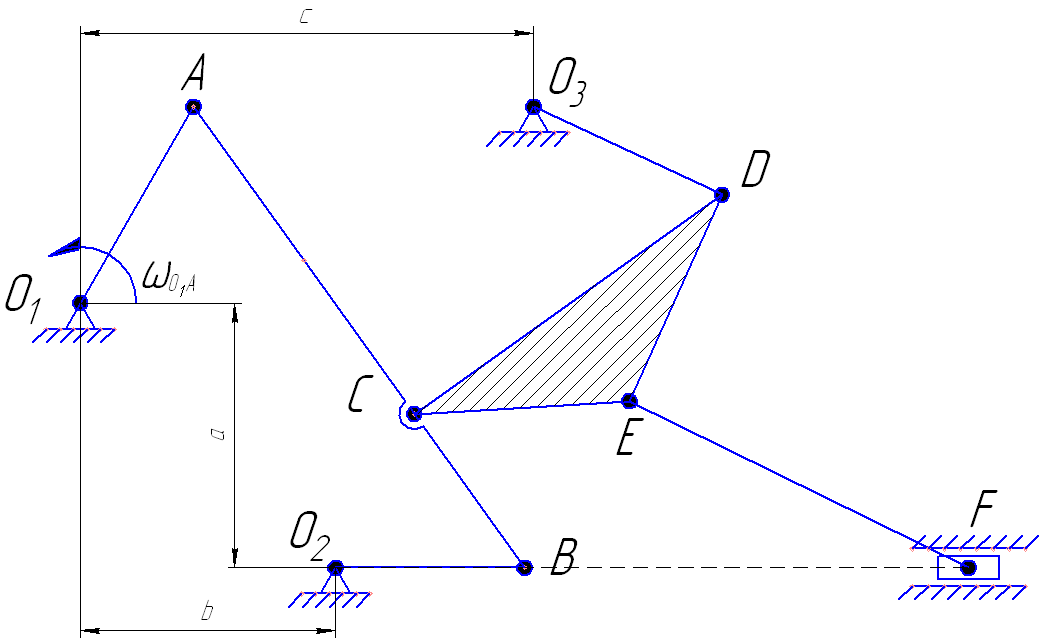
Рис.8
Дано: АО1=60 см, АВ=150 см, АС=100 см, CD=100 cм, СЕ=57 см, DE=60 см, DO3=55 см, EF=130 см, a=70 cм, b=68см, с=120см. Кривошип О1А вращается с постоянной угловой скоростью ωАО= 1 с-1 = const.
Определить для заданного положения механизма:
1) Скорости шарнирных точек механизма и угловые скорости звеньев с помощью плана скоростей;
2) Скорости шарнирных точек механизма и угловые скорости всех его звеньев с помощью МЦС (мгновенных центров скоростей);
3) Ускорения шарнирных точек механизма и угловые ускорения ( ) всех его звеньев с помощью плана ускорений.
Строим схему механизма в соответствии с заданными размерами в выбранном масштабе
![]() ,
,
где
![]() - длина звена
- длина звена
![]() ;
;
![]() - длина отрезка
=
25 мм
на плане механизма.
- длина отрезка
=
25 мм
на плане механизма.
Определяем модуль скорости точки А начального звена :
![]() ,
,
Вектор перпендикулярен звену и направлен в сторону вращения кривошипа .
Метод мцс
Так
как точка В принадлежит звену
![]() ,
совершающему вращательное движение,
то
,
совершающему вращательное движение,
то
![]() .
.
Зная
направление скоростей
и
,
находим МЦС звена АВ -
![]() ,
как точку пересечения перпендикуляров,
проведенных к
и
из точек А и В (рис.9).
,
как точку пересечения перпендикуляров,
проведенных к
и
из точек А и В (рис.9).
Скорость находим из отношения
![]() ,
,
где
![]() и
и
![]() - расстояния до МЦС, измеренные по схеме
механизма и переведенные с учетом
масштаба в натуральную величину.
- расстояния до МЦС, измеренные по схеме
механизма и переведенные с учетом
масштаба в натуральную величину.
Откуда
![]() .
.
Угловая скорость звена АВ
![]() .
.
Направление угловой скорости звена определяется по направлению скорости вокруг МЦС – в нашем случае против хода часовой стрелки.
Угловая
скорость
![]() равна:
равна:
![]() .
.
Так как точка С принадлежит звену АВ, то ее скорость определяется из отношения:
![]()
Вектор
![]() направляем перпендикулярно отрезку
направляем перпендикулярно отрезку
![]() в сторону вращения звена АВ. Затем
находим МЦС звена CDE -
в сторону вращения звена АВ. Затем
находим МЦС звена CDE -
![]() и аналогично определяем скорости
и аналогично определяем скорости
![]() и угловые скорости
и угловые скорости
![]() ,
,
![]() и
и![]()

Рис..9. Метод определения скоростей с помощью МЦС
![]()
![]()
![]()
Метод планов скоростей.
Определяем скорость точки А:
![]()
и
из произвольно выбранного полюса
откладываем
отрезок
![]() который в масштабе
который в масштабе
![]() ,
,
представляет скорость (рис 11).
Рис. 10.
Затем переходим к рассмотрению движения звена АВ, совершающего плоское движение. Используем теорему о распределении скоростей
,
где
![]()
![]() .
.
В
соответствии с векторным уравнением,
из точки
проводим линию перпендикулярную АВ, а
из полюса скоростей
- линию перпендикулярную
![]() .
Точка пересечения этих линий определяет
скорость точки В. Измеряя длины отрезков,
с помощью масштабного коэффициента,
находим
.
Точка пересечения этих линий определяет
скорость точки В. Измеряя длины отрезков,
с помощью масштабного коэффициента,
находим
Используя
соотношение
![]() ,
,
находим

Рис.11. План скоростей механизма.
Вектор
на
плане указывает направление скорости
![]() .
.
Далее рассмотрим движение звена CDE. Составляем уравнение для определения скорости точки D
![]()
где
![]()
![]()
и из последующего построения плана скоростей находим
Для
определения
![]() составляем систему уравнений:
составляем систему уравнений:
![]()
в
соответствии, с которым строим план
скоростей для точки
![]() и находим
и находим
![]() .
.
Составляя уравнение
![]()
![]()
завершаем построение плана скоростей механизма, по которому находим
Результаты расчетов сводим в таблицу 1.
Таблица 1
Способ определения |
Скорости точек, см/с |
|||||
VA |
VB |
VC |
VD |
VE |
VF |
|
По плану скоростей |
0,6 |
0,67 |
0,57 |
0,21 |
0,33 |
0,26 |
С помощью МЦС |
0,6 |
0,67 |
0,58 |
0,2 |
0,33 |
0,26 |
Способ определения |
Угловые скорости звеньев, рад/с |
|||||
|
|
|
|
|
|
|
По плану скоростей |
1 |
0,43 |
0,45 |
0,24 |
1,34 |
0,38 |
С помощью МЦС |
1 |
0,43 |
0,45 |
0,24 |
1,34 |
0,37 |
Несущественные расхождения результатов объясняются погрешностью построения.