2.4. Грузоподъемные механизмы.
Грузоподъемные механизмы (ГПМ) предназначены для подъема, опускания и перемещения различных грузов. К числу грузоподъемных механизмов относятся механизмы стреловых грузовых устройств, грузовые краны, шлюпочные лебедки, средства внутрисудовой механизации. В качестве привода этих механизмов применяются в основном электродвигатели и гидроприводы. Каждый механизм должен быть снабжен тормозом, обеспечивающим торможение с коэффициентом запаса не менее: 1,5 – механизм подъема груза; 2 - механизм изменения вылет стрелы; 1 – механизм поворота и передвижения ГПМ. Тормоза предназначены для обеспечения Надежности при отказе электрической или гидравлической энергии. Они также включаются по сигналу от конечных выключателей при достижении предельного положения при подъеме и опускании стрелы или образовании ослабленных петель при укладке троса на барабан ГПМ.
В настоящее время на судах широкое распространение получили электрогидравлические поворотные краны. По сравнению с другими ГПМ они обладают рядом преимуществ, а именно:
при пользовании ими не нужны подготовительные работы, связанные с постановкой такелажа;
затраты энергии на привод крана меньше, чем на привод лебедок грузовых стрел (топенантной и грузовой), выполняющих ту же операцию,
Устройство электрогидравлического стационарного крана КЭГ 8018, выпускаемого отечественной промышленностью, показано на рисунке ниже.
Рис.19. электрогидравлический стационарный кран КЭГ 8018 |
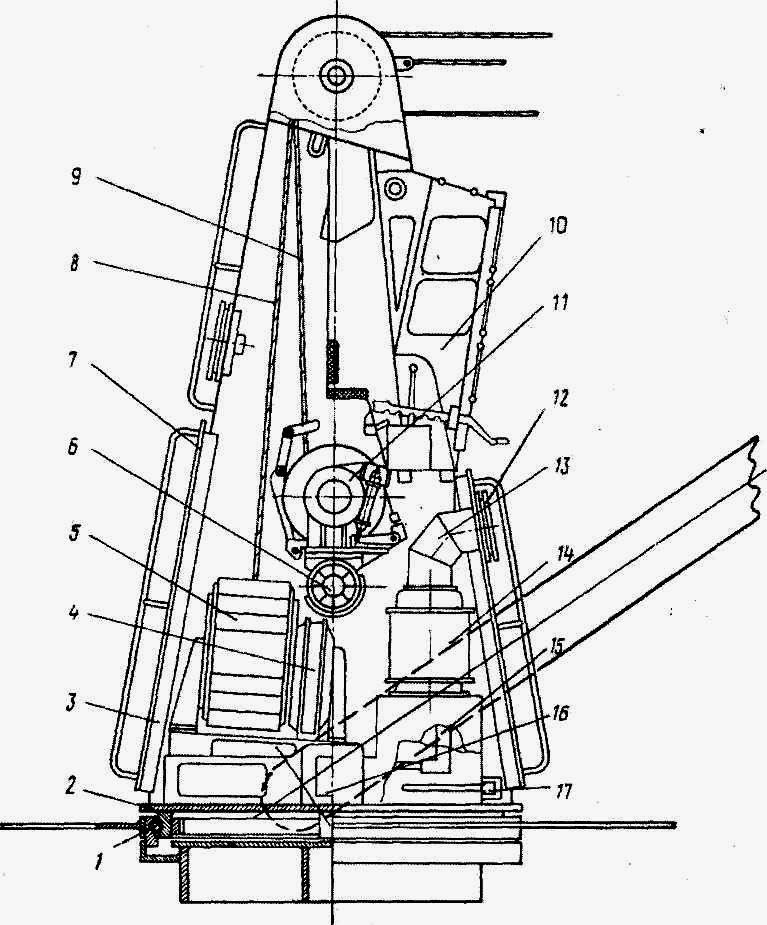 Корпус
крана 3 опирается на плиту 2, и относительно
фундамента вращается в опорном подшипнике
1. Грузовая лебедка 5 для грузового
шкентеля 8 приводится во вращение
гидромотором 4. Аналогичное устройство
имеет лебедка 11 для топенанта 9. Все
гидромоторы, в том числе и механизм
поворота (на рис. не виден) получают
питание от насосной станции 15 с
электродвигателем 14. Для доступа к
механизмам крана с целью монтажа и
обслуживания служит дверь 7. Крановщик
находится в кабине 10. Электропитание к
крану подводится от судовой сети через
токосъемник 16. Охлаждение механизмов
производится через вентиляционное окно
12 и кожух 13. Масло гидросистемы охлаждается
в маслоохладителе 6, а в зимнее время
подогревается в маслоподогревателе
17.
Корпус
крана 3 опирается на плиту 2, и относительно
фундамента вращается в опорном подшипнике
1. Грузовая лебедка 5 для грузового
шкентеля 8 приводится во вращение
гидромотором 4. Аналогичное устройство
имеет лебедка 11 для топенанта 9. Все
гидромоторы, в том числе и механизм
поворота (на рис. не виден) получают
питание от насосной станции 15 с
электродвигателем 14. Для доступа к
механизмам крана с целью монтажа и
обслуживания служит дверь 7. Крановщик
находится в кабине 10. Электропитание к
крану подводится от судовой сети через
токосъемник 16. Охлаждение механизмов
производится через вентиляционное окно
12 и кожух 13. Масло гидросистемы охлаждается
в маслоохладителе 6, а в зимнее время
подогревается в маслоподогревателе
17.
На крупнотоннажных судах -контейнеровозах применяются передвижные козловые краны На лихтеровозах для подъема и перемещения по судну плаву-чих контейнеров-лихтеров используются самоходные козловые краны. Специальные устройства судов с вертикальным и горизонтальным способом грузообработки описаны в [2]. К средствам внутрисудовой механизации относятся различные грузоподъемные механизмы МО, грузовые и пассажирские лифты, подъемники и транспортеры производственно-технологических помещений морских промысловых судов и т. п. Все перечисленные механизмы предназначены для механизации трудоемких работ при ремонте главных и вспомогательных двигателей и котельных установок, для внутрисудовой транспортировки людей и грузов .
Простейшим грузоподъемным механизмом МО являются тали, которые могут быть с ручным и электрическим приводом. В зависимости от типа передачи различают ручные тали, червячные и шестеренные. Тали подвешивают к легким четырехколесным тележкам, перемещаемым по монорельсам (в виде двутавровых балок), устанавливаемым над силовыми агрегатами в МО. Тележки могут иметь ручной механизм передвижения и перемещаться вдоль монорельса. Для механизации судовых работ применяют нормализованные ручные лебедки типа ЛР
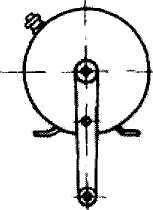
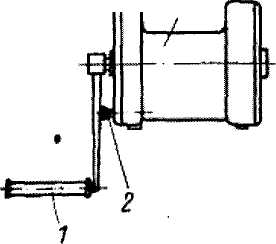
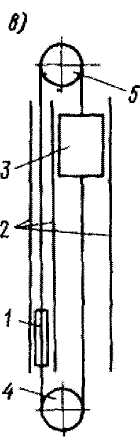
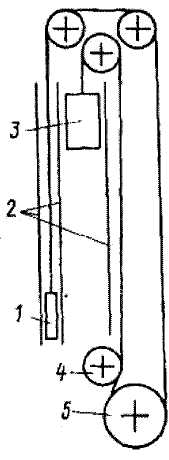
Ручная лебедка (рис. 20) представляет собой барабан 4, закрепленный в стойках закрытого корпуса 3, в котором имеются окна для выхода грузового каната. Барабан приводится во вращение посредством безопасной рукоятки 1через планетарный редуктор, смонтированный частично в стойке корпуса, частично в барабане лебедки. Смазка трущихся деталей осуществляется колпачковой масленкой 2.
а )
3 б)
)
3 б)
Ь)
Рис. 20 Ручная лебедка типа ЛР:
а — общий вид; б — схема направлений каната
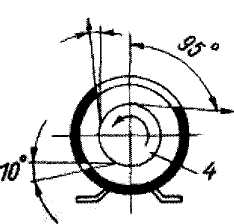
Безопасные рукоятки предотвращают произвольное вращение (разгон) ручных механизмов при спуске груза. У ручных лебедок рукоятка соединена непосредственно с грузоупорным тормозом, а у ручных талей с таким тормозом соединена звездочка тяговой цепи:
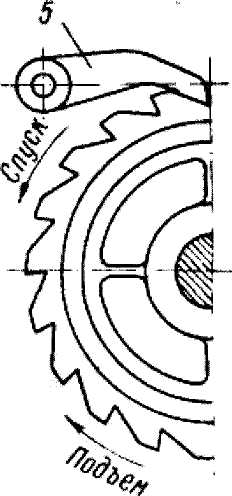
Грузоупорный тормоз представляет собой автоматический тормоз осевого действия, замыкаемый массой поднимаемого груза и снабженный храповым остановом. При подъеме груза замкнутый тормоз автоматически отключается храповым остановом, а при остановке рукоятки или цепной звездочки — автоматически включается и удерживает груз на весу. Груз спускается вращением рукоятки или цепной звездочки, которые либо проворачивают затянутый тормоз, либо производят непрерывное частичное размыкание трущихся поверхностей, достаточное для плавного спуска груза. Это достигается в винтовом грузоупорном тормозе, конструкция которого приведена на рис. 21
Рукоятка или цепная звездочка вращает вал 1, на котором закреплен диск 2 и посажен на резьбе диск 4, являющийся шестерней зубчатой передачи к барабану. При вращении вала 1на подъем диск 4 перемещается влево и сжимает храповик 3, который начинает вращаться, так как этому не препятствует собачка 5
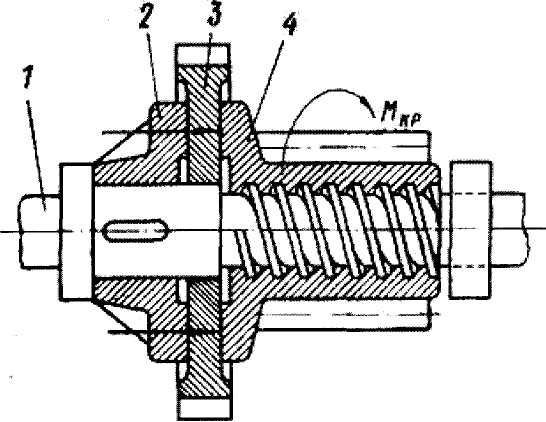
При остановке вала собачка останавливает храповое колесо, и груз остается на весу. При вращении вала в сторону спуска диск передвигается вправо, размыкая тормоз; при этом груз начинает ускоренно опускаться и шестерня-диск 4, обгоняя вал, перемещается опять влево, сжимая неподвижный храповик. Подобные повторяющиеся смещения диска 4 переходят в плавное непрерывное скольжение дисков 2 и 4 по неподвижному храповику 3, и груз опускается со скоростью, отвечающей частоте вращения вала; при этом средняя угловая скорость шестерни 4 равна угловой скорости вала. Для удержания груза необходимо, чтобы тормозной момент между дисками 2,4 и храповиком был больше крутящего момента, развиваемого массой груза на валу.
Недостатками грузоупорных тормозов являются излишняя затрата энергии при спуске, повышенный износ тормоза и медленная остановка груза. Достоинства: компактность и несложная регулировка скорости спуска.
Для обслуживания МО современных крупнотоннажных судов в последнее время начали применять мостовые краны. Управляемые дистанционно, они имеют электрические приводы на механизмах подъема, перемещения моста (вдоль ДП судна) и грузовой тележки (поперек судна). Благодаря такой конструкции мостовые краны полностью механизируют все ремонтно-монтажные работы в МО.
С ростом размерений судов, увеличением числа их палуб, появлением специализированных помещений на судах получили широкое распространение грузовые, камбузные и пассажирские лифты. Наиболее распространенные кинематические схемы судовых лифтов представлены на рис. 22. Общим для всех схем является наличие противовеса у кабины и канатоведущего барабана у лебедки. Лифт представляет собой устройство прерывного действия, предназначенное для подъема и спуска людей и грузов в кабине, которая перемещается по жестким вертикальным направляющим, установленным в шахте.
К средствам внутрисудовой механизации можно отнести также различные конвейеры, ящичные и элеваторные подъемники, а также подъемные платформы судов с горизонтальным способом грузообработки.
ю
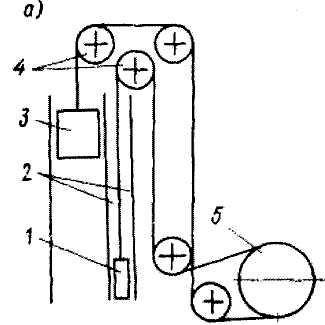
1- противовес; 2 - направляющие; 3 - клеть; 4 - блоки; 5 -канатоведущий шкив
2.5. Расчет мощности привода брашпиля.
По результатам исследования режимов работы якорных механизмов морских судов с неограниченным районом плавания установлено, что натяжение цепи у цепной звездочки якорного механизма в среднем с небольшими отклонениями может быть принято Тзв =3,7 4Gяк, где Gяк –масса якоря.
Наибольший расчетный момент на валу цепной звездочки
Mзв max = Tзв max Rзв ,
где
 расчетный радиус цепной звездочки;
расчетный радиус цепной звездочки;
z- число кулаков цепной звездочки (обычно z =5); t=4d - внутренняя длина (шаг) цепи с распорками, d – калибр цепи.
Момент на валу двигателя при наибольшей расчетной нагрузке определяется как
![]() ,
,
где i– передаточное число якорного механизма
M – механический к.п.д. якорного механизма (с учетом к.п.д. зубчатого или червячного редуктора, который может быть принят равным M=0,7 0,8)
Частота вращения вала электродвигателя, исходя из средней скорости выбирания якорного каната V=9м/мин, определяется как
![]()
Номинальная паспортная мощность электродвигателя :
постоянного тока Мэд ном = Мэд ток ;
переменного тока Мэд ном = Мэд max /2
Эти значения позволяют выбирать тип электродвигателя ( по каталогам).
3. Обеспечение лабораторной работы.
Лабораторная работа выполняется с целью детального изучения конституции, принципа действия основных типов палубных механизмов. Методическое обеспечение включает в себя настоящие методические указания и альбом, содержащий схемы, рисунки и чертежи упомянутых выше палубных механизмов.
При изучении конкретных групп механизмов и узлов требуется использовать знания, полученные в период прохождения плавательной практики, а также учебники и другие учебные пособия и технические описания современного оборудования.
4. Порядок выполнения работы.
Ознакомиться с конструкцией, представленных в альбоме механизмов и узлов.
Уяснить принцип действия каждого из механизмов, последовательность разборки, сборки и передачу движения от привода к выходному звену.
Изучить приближенную методику оценки мощности и частоты вращения привода якорно-швартовного механизма.
Рассчитать требуемые параметры электропривода якорно-швартовного механизма (по заданию преподавателя).
5. Контрольные вопросы.
Какие палубные механизмы используются на судах ?
Какие типы рулевых приводов применяются на судах ?
Какие механизмы используются в якорно-швартовных устройствах судов ?
Для чего предназначены грузовые устройства и какие механизмы обеспечивают их работу ?
Каков принцип действия механизмов, содержащихся в атласе палубных механизмов ?
Какова последовательность определения мощности привода брашпиля ?
Чем отличается автоматическая швартовная лебедка от обычной ?
6. Содержание и оформление отчета.
Отчет должен включать в себя следующее:
Титульный лист.
Четкое изложение цели работы.
Определить мощность и обороты электропривода брашпиля (по индивидуальному заданию).
Письменные ответы на контрольные вопросы.
Литература
1. Завиша В.В., Декин Б.Г. Судовые вспомогательные. М.: Транспорт 1984 г. 358с.
2. Власьев Б.А., Резник Ю.И. Судовые вспомогательные механизмы и системы Л.: Судостроение 1989 г., 239 г.
Лабораторная работа № 4-1
ИЗУЧЕНИЕ КОНСТРУКЦИЙ ТЕПЛООБМЕННЫХ АППАРАТОВ И
ОПРЕДЕЛЕНИЕ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ТРУБНОГО ПУЧКА
1. Цель работы
-изучить конструкции теплообменных аппаратов различного назначения путем их разборки и сборки;
-определить конструктивные параметры трубного пучка и величины, характеризующие теплообменный аппарат.
2.Теоретические сведения
Основным типом теплообменных аппаратов (ТА), используемых на судах являются рекуперативные (поверхностные) аппараты, у которых одна рабочая среда передает тепло другой рабочей среде через разделяющую их поверхность (стенку). Схема типового кожухотрубного теплообменного аппарата показана на рисунке 23.
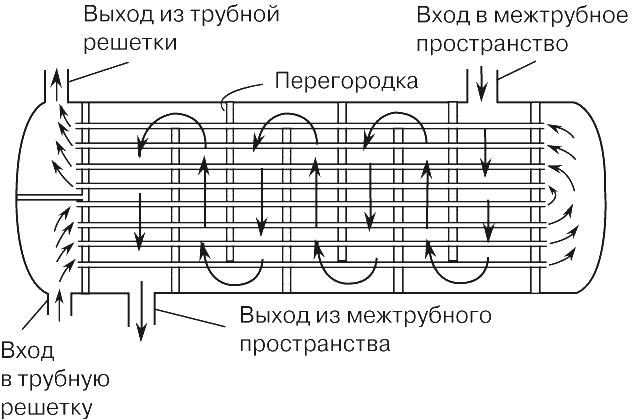
Рисунок 23 Схема типового кожухотрубного теплообменного аппарата |
Теплопередающая поверхность образуется из трубок (пластин) различной конфигурации с целью интенсификации теплообмена при минимальном гидравлическом сопротивлении и массогабаритных показателях ТА.
Если рабочие среды, протекающие по трубкам и циркулирующие в межтрубном пространстве, имеют резкие различия по температуре, то для свободного перемещения составных деталей ТА (в результате температурных расширений) предусматриваются различные способы компенсации без нарушения герметичности аппарата. Такими способами являются:
-V-образные трубки или змеевики;
-линзовые компенсаторы на корпусе;
-плавающие или мембранные трубные доски;
-сальниковые уплотнения трубок;
-трубки Фильде;
-предварительно изогнутые трубки
Каждый из этих способов имеет свои недостатки, соответственно:
-затруднена чистка поверхности в петлях трубок и увеличиваются габариты аппарата;
-ограничено давление рабочей среды в корпусе;
-требуется регулярная подтяжка уплотнения;
-то же для трубок;
-нетехнологично и ненадежно в работе консольное крепление трубок;
-надежность предварительно гнутых сомнительна.
Аппараты пластинчатого типа применяются при давлениях рабочих сред до 0,3МПа, хотя по размерам теплопередающих поверхностей имеют очень широкий диапазон.
Поэтому кожухотрубные ТА с прямыми трубками применяются достаточно широко. Коэффициент теплоотдачи внутри трубок увеличивают путем турбулизации потока рабочей среды, что обеспечивается установкой различного рода интенсифицирующих вставок. Так, например, применяются интенсификаторы – турбулизаторы в виде металлических винтообразных лент с различным шагом закрутки, вставляемых в трубки аппарата. Некоторые зарубежные фирмы применяют ленту, ширина которой равна внутреннему диаметру трубки, с отштампованными наклонными «язычками», отогнутыми в виде «елочки» поочередно в одну и в другую стороны. Эти «язычки» имеют эллиптический профиль и упруго прижимаются к внутренней стенке трубки, обеспечивая плотный контакт. Они способствуют лучшему перемешиванию рабочей среды и соответственно улучшают условия теплопередачи.
Встречаются аппараты змеевикового типа и с поверхностью из витых трубок. В них рабочая среда турбулизирует свой поток за счет перемешивания слоев при непрерывном повороте потока.
Для увеличения скорости рабочей среды в межтрубном пространстве устанавливают различного рода перегородки: не перекрывающие поперечные или продольные; поперечные с проходами в виде секторов, которые не совпадают со смежными; поперечные сплошные в виде винтовой поверхности.
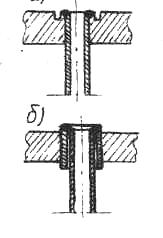
Все большее распространение в последние годы приобретают способы закрепления трубок в трубных досках при помощи сварки (рисунок 24):
Иногда крепят трубки в трубной доске на резьбе с последующей подваркой с торца трубки.
В некоторых случаях, чтобы предотвратить взаимное проникновение рабочих сред, теплообменные аппараты выполняют с двойными трубными досками. Полость между ними чаще всего сообщается с атмосферой.
а)
|
б)
|
Рис. 24. Способы приварки трубок |
|
а) приварка трубок при наличии на трубной доске специальных концентричных колец по толщине, равных толщине привариваемой трубки; б) путем приварки трубки к развальцованной в трубной доске втулке.
|
|