

2. 2. Подруливающие устройства.
Для обеспечения маневренности судна на очень малом ходу, когда рулевое устройство становится неэффективным, применяют подруливающие устройства. Их устанавливают в поперечных туннелях (в носу, корме) судна или делают выдвижными. Применяют эти устройства на различных судах, чаще всего на пассажирских, контейнеровозах, танкерах, Ро-Ро.
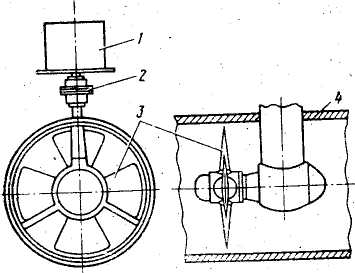
Различные типы подруливающих устройств показаны на рис.16. Они особенно эффективны при швартовках судов: сокращается время швартовных операций и повышается безопасность мореплавания; если условия порта позволяют, то швартовка возможна даже без буксиров, что сокращает портовые расходы.
В подруливающем устройстве (рис. 16) электродвигатель 1 через муфту 2 приводит в действие ВРШ, размещенный в поперечном туннеле 4. Упор винта и направление тяги регулируют поворотом лопастей 3 с помощью специальной системы гидропривода.
|
|
|
|
Рисунок. 16. Схема и конструкции подруливающих устройств.
|
|

Принцип действия типовой гидравлической системы поворота лопастей винта показан на рис. 17 и заключается в следующем. Насос 4 постоянной подачи через фильтр 3 принимает рабочую жидкость из цистерны 1 и подает через невозвратный 5 и запорный 7 клапаны к золотниковому распределителю 24. Управление им осуществляется с помощью исполнительного механизма 22 дистанционной электрической системы.
Предположим,
что управляющий рычаг ОА повернулся из
нулевого положения по часовой стрелке
на угол
![]() и занял положение ОА1.
При этом дифференциальный рычаг ВС
занимает положение ВС1
а золотник 24 перемещается вверх. Рабочая
жидкость из трубопровода
а
поступает в трубопровод б
и далее в полость в
цилиндра
изменения
шага
винта. Цилиндр 31 перемещается вправо
по штоку 34 относительно неподвижного
поршня 33. Это приведет
к
повороту лопастей 32. Масло из противоположной
полости г
выталкивается по трубопроводу д
через золотник 24 в трубопровод ж
и далее на слив через клапан 37 и фильтр
40. Перемещение цилиндра 31 передается
через подвижное соединение
27, рычаги DE
и EF,
угловой
рычаг FGH,
штангу НВ на дифференциальный рычаг
ВС, который, вращаясь относительно точки
А1,
переходит из положения ВС1
в положение В1С.
При этом золотник 24 возвращается в
нулевое положение, запирает гидроцилиндр,
перепускает масло из трубопровода
и занял положение ОА1.
При этом дифференциальный рычаг ВС
занимает положение ВС1
а золотник 24 перемещается вверх. Рабочая
жидкость из трубопровода
а
поступает в трубопровод б
и далее в полость в
цилиндра
изменения
шага
винта. Цилиндр 31 перемещается вправо
по штоку 34 относительно неподвижного
поршня 33. Это приведет
к
повороту лопастей 32. Масло из противоположной
полости г
выталкивается по трубопроводу д
через золотник 24 в трубопровод ж
и далее на слив через клапан 37 и фильтр
40. Перемещение цилиндра 31 передается
через подвижное соединение
27, рычаги DE
и EF,
угловой
рычаг FGH,
штангу НВ на дифференциальный рычаг
ВС, который, вращаясь относительно точки
А1,
переходит из положения ВС1
в положение В1С.
При этом золотник 24 возвращается в
нулевое положение, запирает гидроцилиндр,
перепускает масло из трубопровода
![]() в сливной трубопровод ж.
Поворот лопастей завершен. Фактическое
значение угла
,
соответствующее заданному углу
в сливной трубопровод ж.
Поворот лопастей завершен. Фактическое
значение угла
,
соответствующее заданному углу
![]() ,
передается на мостик с помощью датчика
20.
,
передается на мостик с помощью датчика
20.
|
Рис. 17 Принципиальная схема гидропривода подруливающего устройства
|
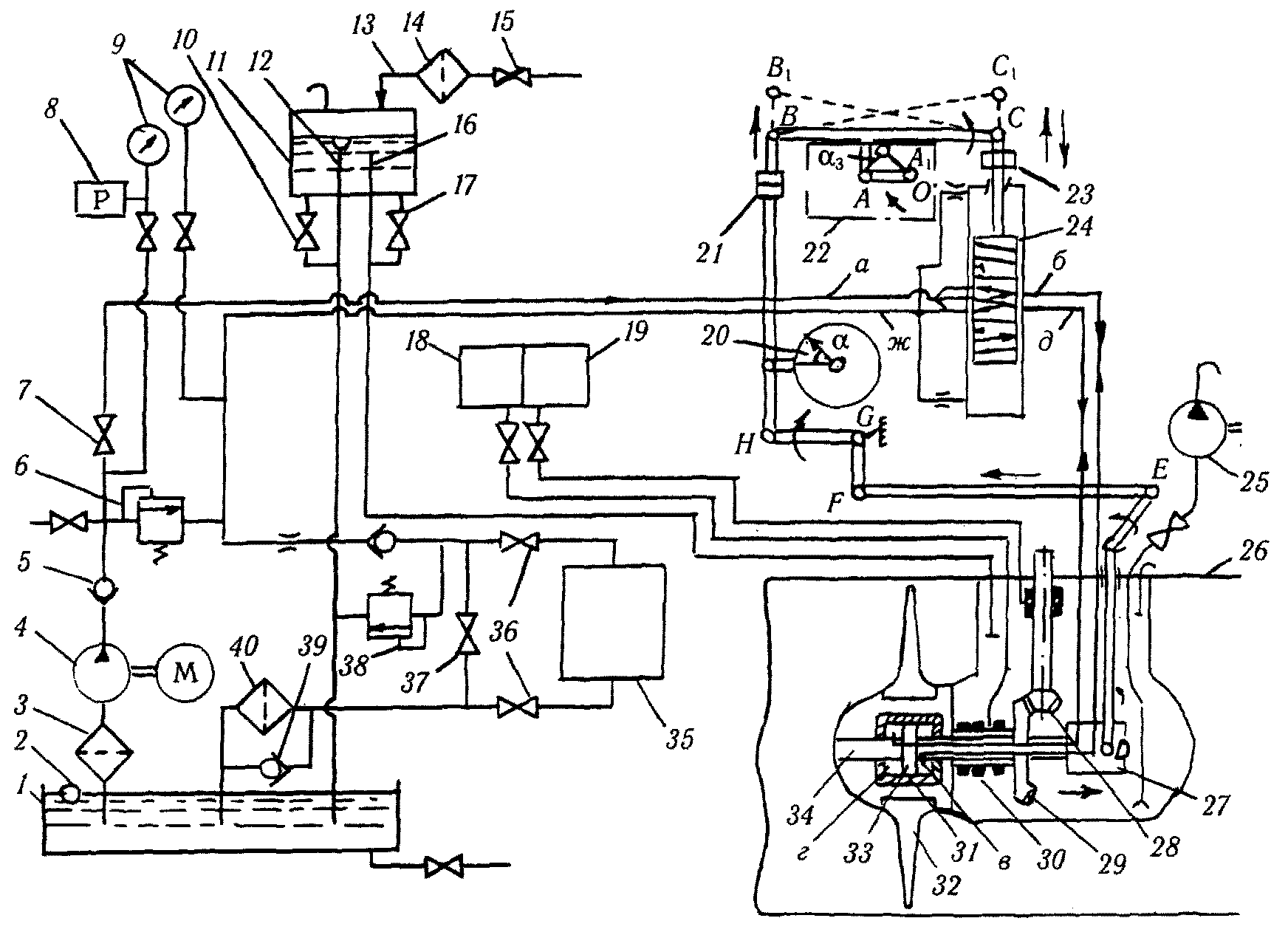
Как
видим, золотниковый распределитель 24,
гидроцилиндр 31 и рычажный механизм
обратной связи представляют следящую
систему. Для изменения угла
необходимо новое задание угла
![]() .
.
Отрицательный управляющий сигнал вызывает поворот рычага ОА против часовой стрелки, и золотник 24 опускается. При этом нагнетательный трубопровод а соединяется с трубопроводом д, а сливной ж с трубопроводом б. Цилиндр 31 перемещается влево и с помощью рычажного механизма вновь возвращает золотник 24 в нулевое положение.
Расходный бак 11 с клапанами 10, 17 и трубопроводами 12, 16 служит для создания подпора в корпусе редуктора (28 + 29) в целях предотвращения протечек забортной воды, а также пополнения редуктора и цистерны 1 рабочей жидкостью. Бачки 18, 19 обеспечивают контроль состояния уплотнений 30 основного вала и уплотнений ведущего вала 28. Маслоохладитель 35 с клапанами 36 используют при необходимости для предотвращения перегрева масла.
Клапан 6 предохраняет насос и регулируется на максимальное давление примерно 5МПа. Клапан 39 перепускает масло при значительном загрязнении фильтра 40. Трубопровод 13 с фильтром 14 и клапаном 15 служит для пополнения бака 11, а ручной насос 25 для откачивания масла из корпуса редуктора. Подруливающее устройство установлено в поперечном туннеле 26. Поплавковое устройство 2 служит для сигнализации о понижении уровня масла в цистерне 1.
Датчик давления 8 и манометры 9 обеспечивают контроль работоспособности гидросистемы. Винтовые соединения 21 и 23 служат для регулирования среднего положения золотника 24 и рычажного механизма обратной связи. Клапан 38 предохраняет маслоохладитель 35 от повышенного давления.
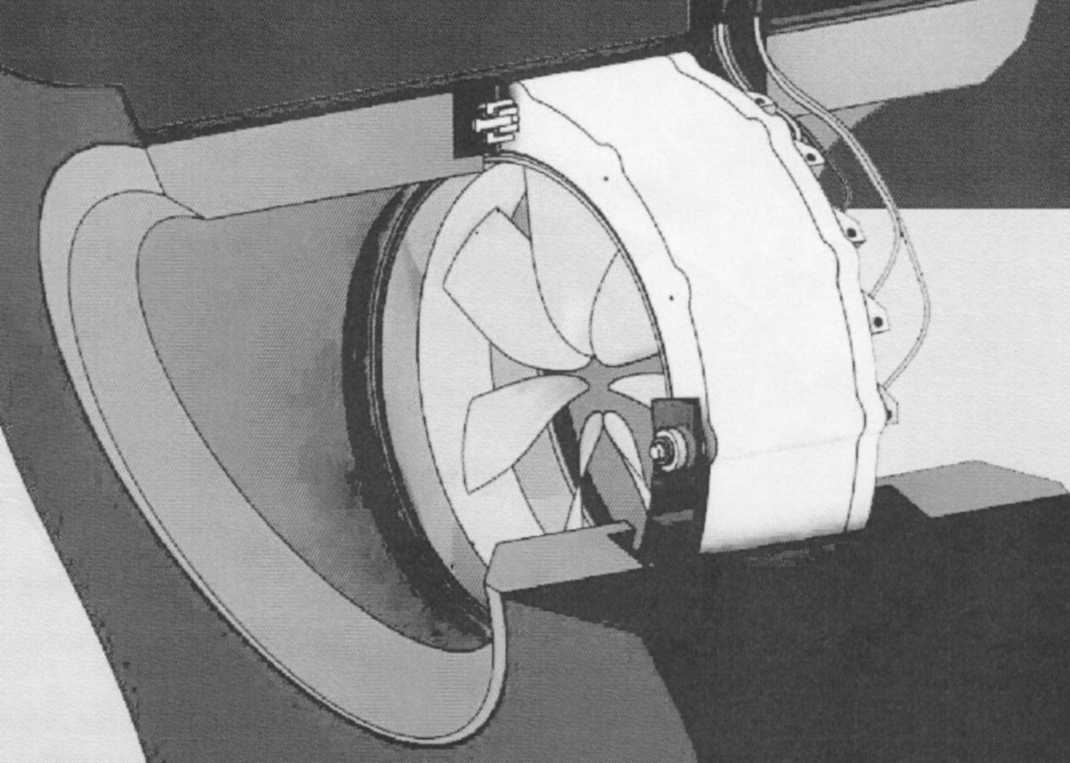
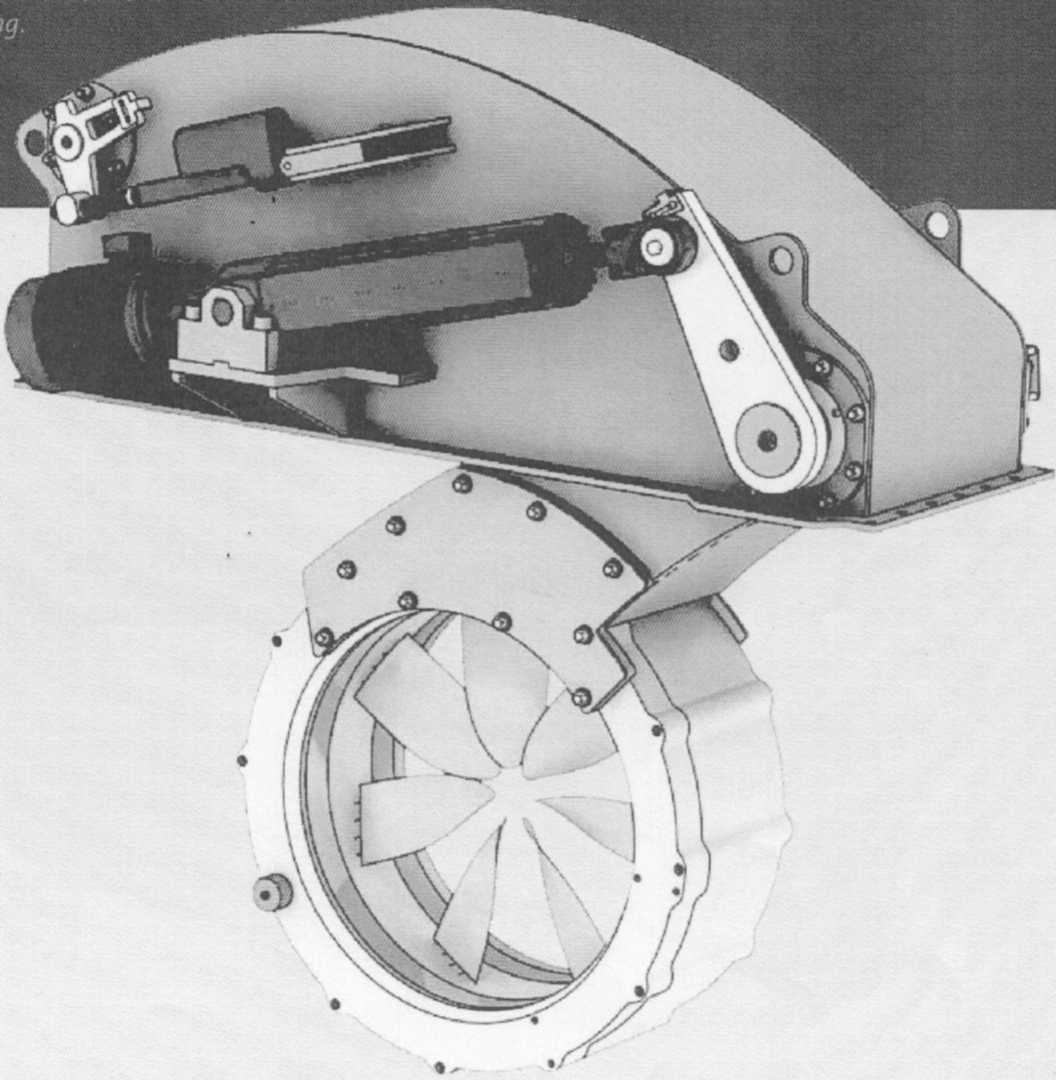
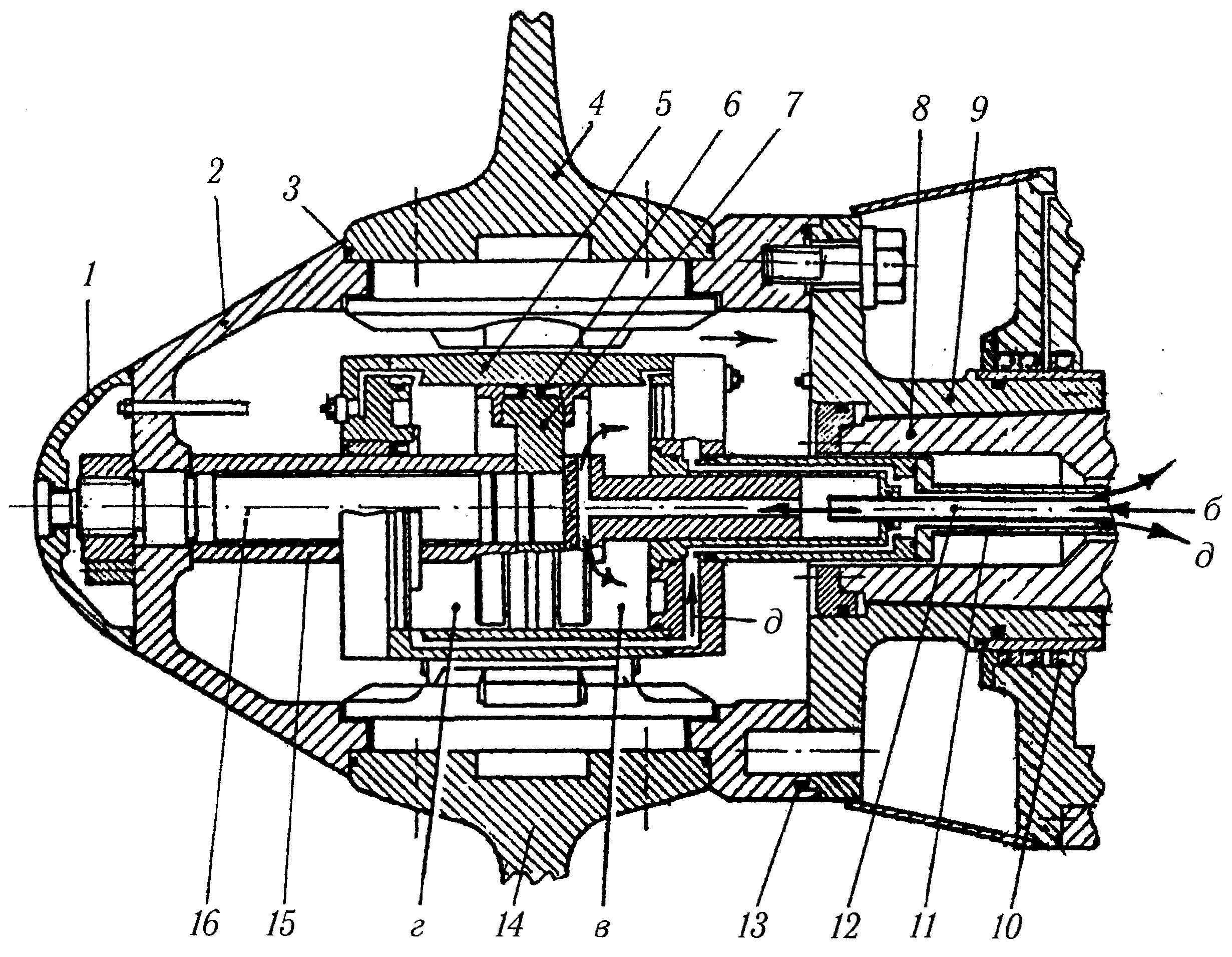
Механизм изменения шага (рис. 18) лопастей подруливающего устройства расположен внутри герметичного корпуса 2, соединенного болтами с конусной муфтой 9, которая насажена на основной вал 8. МИШ состоит из подвижного, цилиндра 5 и неподвижного поршня 7, имеющего уплотнение 6 и соединенного с корпусом 2 с помощью штока 16.Втулка 15 является рабочей поверхностью подвижного соединения с цилиндром 5.
Герметичность корпуса 2 обеспечивается уплотнениями 3 лопастей 4 и 14 и уплотнениями 13. Обтекатель 1 также имеет свои уплотнения. Муфта 9 вращается вместе с валом 8, поэтому уплотняется устройством 10. Механизм изменения шага действует следующим образом. Рабочая жидкость от насосного агрегата подается, например, по трубе 12 в направлении стрелки б и поступает в правую полость в цилиндра 5.
Он перемещается вправо. Жидкость из левой полости г отводится в направлении стрелки д по наружной трубе 11 и наоборот (буквенные обозначения соответствуют рис. 17).
На внешней поверхности цилиндра 5 имеются сухари специальной формы, которые входят в пазы, расположенные на торцах лопастей 4 и 14 (всего четыре лопасти). Такое соединение превращает линейное перемещение цилиндра во вращательное движение лопастей.
Рисунок. 18. Механизм изменения шага лопастей подруливающего устройства. |
На судах серии «Инженер Ермошкин» были установлены в носовом и кормовом поперечных туннелях подруливающие устройства марки ПУ 500-ОМ4.1. Их основные технические параметры: масса 14 100 кг, диаметр винта 2 м, четыре лопасти, поворот лопастей ±21°, частота вращения 244 мин-1, направление — правое, ресурс до заводского ремонта 10 тыс. ч, ресурс непрерывной работы 500 ч. Параметры приводного электродвигателя: тип АКМ500-4ВКОМ4, напряжение 380 В, мощность 500 кВт, частота вращения 1475 об/мин. Параметры гидропривода: наибольшее рабочее давление 5 МПа, масло - АУП в количестве 0,15 м3, время реверса лопастей 20 с. Редуктор полностью заполнен маслом Тп 46 в количестве 0,54м3.
Имеется система дистанционного управления ПУ, а также предусмотрено местное управление, которое используется в случае отказа дистанционной системы. Блокировка отключает систему управления, если при пуске ПУ лопасти находятся не в нулевом положении. Система управления отключается также в случае падения давления в гидросистеме (датчик давления 8, см. рис. 17).