

Лабораторная работа №3. Моделирование характеристик измерительных преобразователей и измерительных каналов иис в статистическом режиме работы в Simulink
Для оценки степени согласованности измерительного канала (ИК) ИИС, влияния погрешности, изменения сигнала на выходах отдельных блоков используется моделирование измерительных каналов ИИС в статистическом режиме работы. Модель ИК ИИС основана на моделях отдельных измерительных преобразователей (ИП) составляемых на основе паспортных или экспериментальных данных. Ниже будут рассмотрены основные модели ИП и методика разработки модели ИК ИИС.
1. Моделирование измерительного преобразователя с линейной и нелинейной функциями преобразования
В простейшем случае модель ИП базируемся на линейной функции преобразования входного сигнала
![]() , (1)
, (1)
где
X,
Y
- входной и выходной сигналы ИП, k
- чувствительность ИП,
![]() ,
Xmax,
Xmin,
Ymax,
Ymin
- диапазоны изменения входного и выходного
сигналов ИП, b
- постоянное смещение,
,
Xmax,
Xmin,
Ymax,
Ymin
- диапазоны изменения входного и выходного
сигналов ИП, b
- постоянное смещение,
![]() .
.
Модель измерительного преобразователя с линейной функцией преобразования приведена на рис. 1, график изменения входного и выходного сигналов на рис. 2. Блок Gain задает операцию умножения входного сигнала X на чувствительность k ИП. Блок Constatnt и последующая сумма добавляют к выходному сигналу величину b. Блок Saturation обеспечивает условие изменения выходного сигнала в пределах от Ymax до Ymin.

Рис. 1. Модель измерительного преобразователя с линейной функцией преобразования

Рис. 2. Выходной и входной сигналы измерительного преобразователя с линейной функцией преобразования
В
случаях когда функция преобразования
ИП нелинейная, или иначе чувствительность
не является постоянной величиной, для
моделирования ИП можно использовать
калибровочную таблицу (блок Lookup
Table
на рис. 2) или в соответствии с зависимостью
выходного и входного сигналов создать
математическую модель (рис. 7). В первом
случае для задания калибровочной таблицы
необходимо по отельным значениям указать
векторы X
(Vector
of
input
values
на рис. 7) и Y
( Table
data
на рис. 7) которые будут использоваться
для аппроксимации функции
![]() .
Также в документации на ИП может быть
задан порог чувствительности, т.е.
изменение входного сигнала при которых
не изменяется выходной сигнал. Обычно
порог чувствительности наблюдается в
области малых значений входного сигнала,
т.е. около нуля по Х.
На рис. 3 приведен пример использования
блока Dead Zone отвечающего за порог
чувствительности, а на рис. 6 диалог его
параметров, где "Start of Dead Zone" и "End
of Dead Zone" начальное и конечное значение
интервала по Х
где нет отклика ИП, т.е. сигнал равен
нулю. На рис. 4 приведен результат
моделирования такого ИП.
.
Также в документации на ИП может быть
задан порог чувствительности, т.е.
изменение входного сигнала при которых
не изменяется выходной сигнал. Обычно
порог чувствительности наблюдается в
области малых значений входного сигнала,
т.е. около нуля по Х.
На рис. 3 приведен пример использования
блока Dead Zone отвечающего за порог
чувствительности, а на рис. 6 диалог его
параметров, где "Start of Dead Zone" и "End
of Dead Zone" начальное и конечное значение
интервала по Х
где нет отклика ИП, т.е. сигнал равен
нулю. На рис. 4 приведен результат
моделирования такого ИП.

Рис. 3. Модель измерительного преобразователя с нелинейной функцией преобразования, ненулевым порогом чувствительности и ограничением выходного сигнала

Рис. 4. Выходной и входной сигналы измерительного преобразователя с нелинейной функцией преобразования, ненулевым порогом чувствительности и ограничением выходного сигнала

Рис. 5. Параметры калибровочной таблицы блока Lookup Table

Рис. 6. Параметры блока порога чувствительности Dead Zone

Рис. 7. Модель измерительного преобразователя с нелинейной функцией преобразования
Ниже приведен пример анализа синусного преобразователя (рис. 8), его модели в Simulink (рис. 9) и результата моделирования (рис. 11).

Рис. 8. Синусный преобразователь с поступательной парой a) и точечным контактом б)
Функция преобразования синусного механизма
![]() ,
,
где S – перемещение толкателя; φ – угол поворота синусного рычага, а - длина синусного рычага.
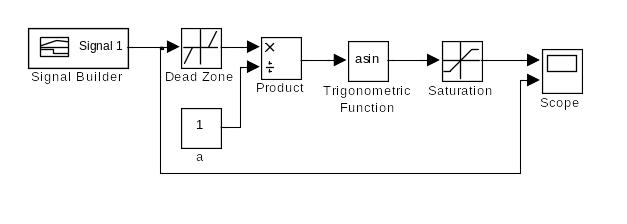
Рис. 9. Модель синусного измерительного преобразователя при а=1 мм.

Рис. 10. Выходной и входной сигналы синусного измерительного преобразователя