

5.3. Характеристика современных автономных необитаемых подводных аппаратов (анпа)
Автономные необитаемые подводные аппараты представляют собой автоматические самоходные носители, способные погружаться в заданном районе океана, двигаться по программной траектории, выполнять необходимые работы исследовательского, осмотрового, картографического и других назначений, по завершению программы возвращаться на судно обеспечения или на базу.
Связь такого аппарата с судном обеспечения, передача команд и информации осуществляется с помощью гидроакустической системы. Исследовательская аппаратура включает в себя измерители параметров водной среды, фото- и видеоаппаратура, обзорные гидролокаторы, магнитометры, акустический профилограф, гравитометр и др.
Автономные подводные аппараты, как и привязные различаются по массе и могут быть "микро" (до 20 кг), "мини" (20…100 кг), малые (100…500 кг), средние (от 500 до 2000 кг), большие (более 2000 кг) [Бочаров].
Аппараты микрокласса (АПМА, "micro" – AUV) составляют 25 % от общего числа автономных необитаемых аппаратов, из них большая часть создается с использованием биологических принципов. Для таких подводных аппаратов характерны необычные для подводной техники, но широко используемые в живой природе подходы к способам перемещения (например, движители в виде рыбьего хвоста и т. п.) и сложным системам управления.
Технические характеристики этого класса аппаратов: дальность плавания 1…2 мили, глубина не более 150 м, скорость хода 1,5…2 уз.
Аппараты миникласса (мини – АМПА) составляют 15…20 % общего количества АМПА. Аппараты этого класса могут иметь дальность плавания от 0,5 мили до нескольких тысяч миль.
Представителями этих аппаратов служат "Slocum Glider I/II" (рис. 7. 555), "Spray Glider" (рис. 7. 556, США, 1989 г.).


Рис. 7. 555. АНПА "Slocum Glider I/II" (США, Канада, 2003 г.)
Идея разработки роботизированного планера возникла в начале 90-х годах прошлого столетия.
АНПА "Slocum Glider I/II" (2003 г.) предназначен для выполнения океанографических исследований и представляет собой самоходный подводный планер длиной 2 м, размахе подводных крыльев 1,22 м. Аппарат скользит по водной поверхности и может погружаться на глубину до 1000 м три раза в день, измеряя различные характеристики океана.

Рис. 7.556. АНПА
"Spray Glider" (США, 2003 г.)

Дальнейшим развитием таких аппаратов стало создание АНПА подводных планеров "Spray Glider", которые стали эксплуатироваться с 2005 года. Они запускаются с судна-носителя в районе Бермудских островов и пересекают Гольфстрим, измеряя состояние океана (температуру, соленость, давление воды). Поднимаясь на поверхность, через спутник передают информацию в центр ее обработки. Дальность действия связи с аппаратом 6000 км (около 3500 миль). Потенциально аппарат может пересечь Атлантический океан и другие океанические бассейны. Оснащен глобальной системой позиционирования, оптическим датчиком для измерения мутности воды (связанной с биологической продуктивностью планктона). Последние модели имеют датчики растворенного в воде кислорода, углекислого газа, щелочности и питательных веществ.
Представителями АНПА малого класса служат "Aqua Explorer 2000" (Япония, 1998 г.), "Odyssey III" (США), "Ocean Explorer" (США), "Sanu II" (США) и др.


Рис. 7.554. АНПА "Aqua Explorer 2000" (Япония, 1998.г.)
АПА для осмотра подводных кабелей на глубинах моря до 2000 м. Масса его 300 кг, габариты 3,0х1,3х0,9 м, автономность до 16 часов.

Рис. 7.553. АНПА "Odyssey III" (США, … г.)
АНПА "Odyssey III" (США) производства фирмы "Robotics Corporation" предназначен для проведения научных исследований морского дна, археологического дистанционного зондирования, мультистатического акустического моделирования, исследования рыбных ресурсов океана и мониторинга океанской среды, с помощью гидролокатора бокового обзора и придонного профилографа.
Он имеет габариты 3,4х0,58х0,58 м, массу 400 кг, автономность до 2 часов, максимальную глубину погружения 3000 м, номинальную скорость хода 1,54 м/с, максимальную скорость хода 2,06 м/с, минимальный радиус зоны действия приборов 10 м.

Рис. 7.553. АНПА "Ocean Explorer" (США)
АНПА "Ocean Explorer" (США) представляет собой аппарат с цилиндрическим прочным корпусом и легким обтекателем приборного отсека. Его особенностью является модульность конструкции, заключающаяся в том, что он может быть продлен или сокращен путем наращивания или удаления дополнительных модулей (секций) с соответствующей аппаратурой.
Прочный корпус диаметром 690 мм, длиной от 4,5 до 6,0 м, массой от 750 до 1250 кг выполнен из алюминия. Диапазон скоростей от 0,5 до 2,5 м/с, максимальная глубина погружения 30, 1000, 3000 или 5000 м. Дальность 120 км на 1,5 м/с. Грузоподъемность до 240 кг. Аппарат оснащен гидролокаторами бокового обзора, многолучевым эхолотом, инерциальной навигационной системой. Для спутниковой связи он имеет телескопическую мачту высотой 1,1 м с антенной GPS.
, "Sanu II" (США) и др.



Рис. 7.553. АНПА "REMUS 6000" (США) и судовые устройства для его спуска-подъема



Рис. 7.553. АНПА "HUGIN 100/3000" (Норвегия) и судовые устройства для его спуска-подъема
Средние АНПА могут быть представлены такими аппаратами как "ARSS" (Канада), "REMUS 6000" (США), "HUGIN 100/3000" (Норвегия).
Известные представители больших АНПА "Alistar 3000" (Франция, рис. 7. 557), "Autosub" (Великобритания), "Seahorse" (США) и др.


Рис. 7. 557. АНПА "Alistar 3000" (Франция, … г.)

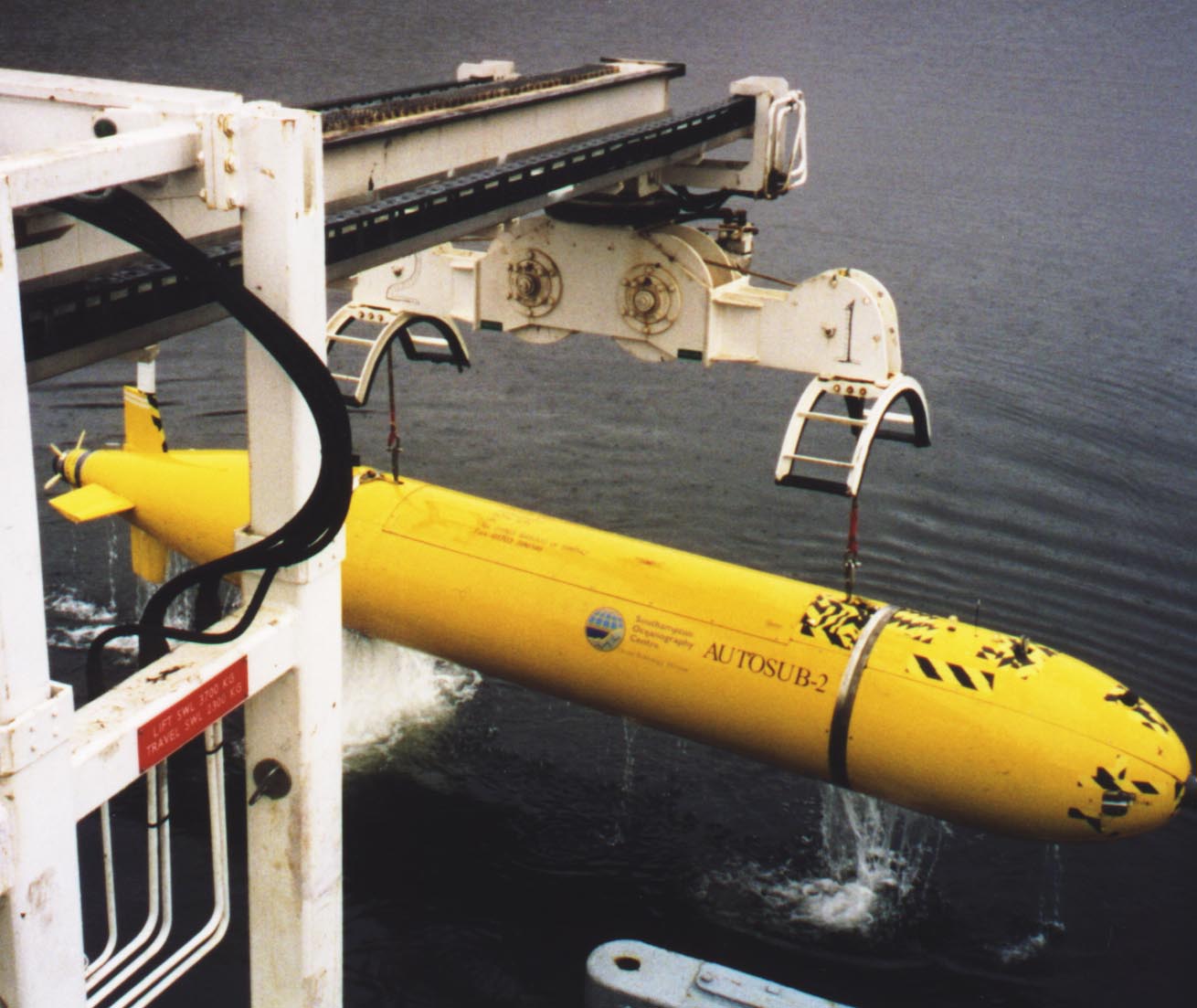

Рис. 7. 557. АНПА "Autosub" (Великобритания, … г.) и судовые устройства его спуска-подъема
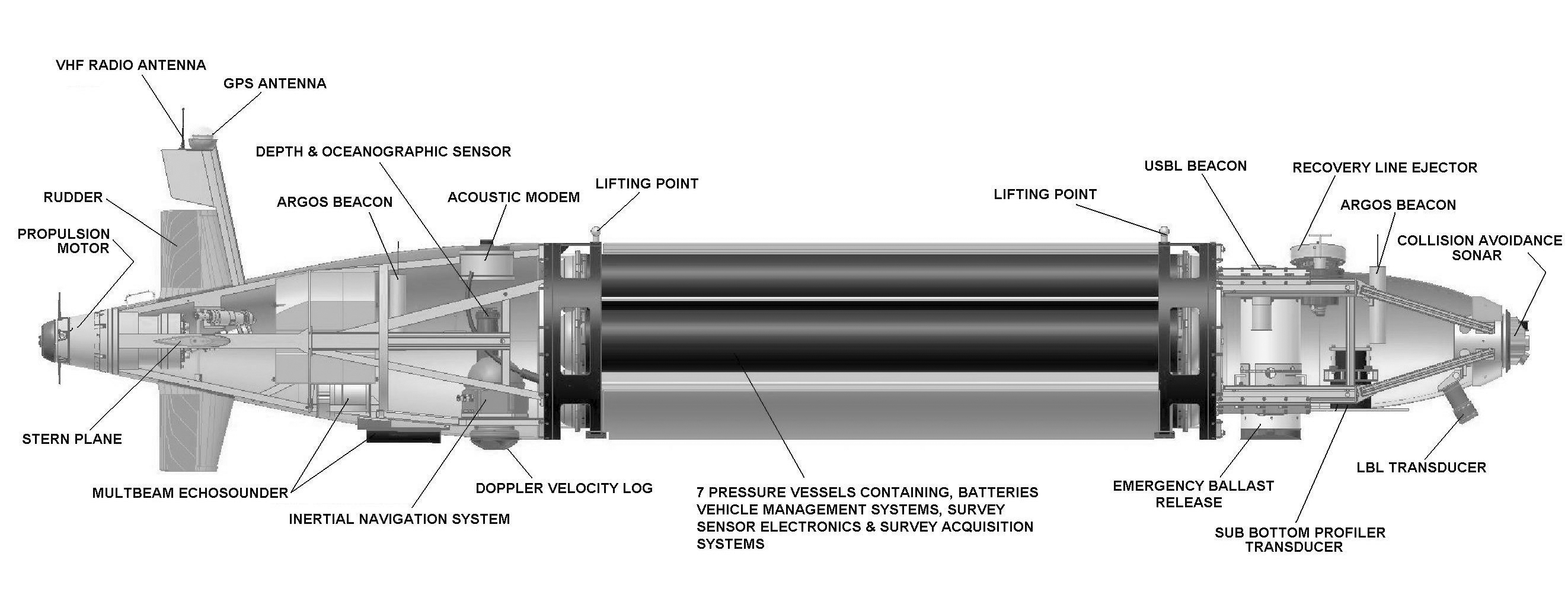
Рис. 7. 558. Конструктивная схема АНПА "Autosub"
АНПА "Autosub" каплевидной (дирижаблевидной) формы массой 2300 кг, имеет габаритные размеры 5х1,68х1,45 м рассчитан на глубину погружения 3000 м и непрерывную работу 24 часов.


Рис. 7. 557. АНПА ""Seahorse" (США) и судовые устройства его спуска-подъема
АНПА ""Seahorse" торпедообразной формы (США) массой 4762 кг, габаритными размерами 8,66х0,97х0,97 м, рассчитан на глубину погружения 1000 м, имеет номинальную автономность 125 часов и дополнительно аварийную 72 часов.

Рис. 7.559. "MicroHunter" (США, 2002 г.)
Одними из самых миниатюрных подводных аппаратов признают АПМА серии "MicroHunter", разработанные в 1999–2002 годах компанией "Nekton Technologies Inc." (США). Эти конструктивно масштабируемые подводные аппараты имеют торпедообразную форму корпуса, длину от 5 до 35 см, диаметр около 5 см, глубину погружения до 100 м и развивают скорость хода под водой до 2 уз. Аппараты предназначены для противоминного подводного зондирования, целенаведения и наведения торпедного оружия, мониторинга физических и биологических свойств водной среды (измерение температуры, солености и т. д.), обнаружения и сопровождения гидроакустических маяков на затонувшие объекты, водолазов и контейнеров. Самый миниатюрный аппарат этой серии имеет дальность действия около 30 км, длину 5 см.

Рис. 4.111. Внешний вид подводного робота-рыбы (лаборатория "Draper", США)

Рис. 4.113. Обучение технике плавания подводного миниробота "Щука" ("Pike")

Рис. 7. 666. АПМА бионического типа МТ1 (Великобритания)

Рис. 7.560. АНПА с движителем типа рыбьего хвоста
Интенсивно ведутся научно-исследовательские работы по созданию бионических подводных аппаратов, технически имитирующих биологические объекты (в частности рыб).
В США Центром морских наук ("Marine Science Center") и Бостонским северо-восточным университетом в 90-х годах XX века выполнялась комплексная научная программа "Подводные роботы на биомимикрических принципах" ("Biomimetic Underwater Robot") с целью создания полностью автоматизированных подводных роботов, имитирующих принципы движения морских биологических объектов. Их назначение:
– обнаружение донных (в т. ч. и заиленных) подводных мин на мелководье;
– осмотрово-инспекционные работы;
– сбор информации с автономных донных станций;
– освещение подводной обстановки;
– поддержка аварийно-спасательных и обзорно-поисковых работ;
– осуществление гидроакустической связи с подводными лодками и другими подводными техническими средствами.
Были разработаны макетные образцы миниатюрных подводных роботов "Робот-лобстер" ("Lobster Robot") и "Робот-минога" ("Undulatory Robot").

Рис. 4.00. Внешний вид подводного мини-робота "Лобстер"

Рис. 4.00. Внешний вид подводного мини-робота "Минога"
В лаборатории Дрейпера ("Draper Laboratory", США) создают необитаемые подводные аппараты повышенной маневренности на основе технической имитации технологий движения рыб. Эти подводные аппараты обладают малым радиусом разворота, существенно сокращенным временем разгона и торможения.
Робот-рыба, разработанная в лаборатории Дрейпера имеет массу 130…150 кг, длину 2,4 м и развивает скорость хода под водой до 5 км/ч.
В 1994 году в Массачусетском технологическом институте ("Massachusetts Institute of Technology – MIT") был создан экспериментальный подводный аппарат "Tuna". Разработанный в 200.. году подводный бионический робот "Щука" ("Pike") длиной около 0,7…0,8 м развивает скорость хода под водой до 5…6 м/с.
Бионический робот-рыба МТ1 созданный в Эссекском Университете "Essex University" (Великобритания) обладает нулевой плавучестью. АПМА МТ1 при длине 480 мм (включая два грудных плавника длиной по 80 мм каждый) и высоте 150 мм имеет массу в воздухе около 3,55 кг.