

Глава 5. Необитаемые подводные аппараты
5.1. Назначение и классификация необитаемых подводных аппаратов
Необитаемые аппараты представляют собой второе большое направление развития подводных аппаратов.
Расположение человека вне погружаемой части в этой разновидности современных технических средств изучения и освоения океана создает ряд преимуществ, среди которых высокая безопасность для обслуживающего персонала, резкое уменьшение габаритов и масс аппаратов в связи с отказом от размещения сложных и связанных с антропометрическими показателями систем жизнеобеспечения, с одной стороны, и взрывообразным развитием миниатюризации исследовательских приборов и устройств, что характерно для современного этапа развития техники, с другой стороны
Необитаемые подводные аппараты сегодня – чрезвычайно многочисленная группа океанотехнических средств. Только одна из разновидностей их – самоходные – в настоящее время имеет свыше 500 различных проектов, а их количество за рубежом в США, Великобритании, Германии, Франции и Японии достигает 5000 единиц [А.Ю. Бочаров. Соврем. Тенденции в развитии миниатюрных ПА и роботов за рубежом].
Необитаемые подводные аппараты (НПА) подразделяются на автономные (АНПА, UUV – Unmanned Underwater Vehicle), неавтономные привязные (ПНПА) и полуавтономные.
Автономные – это такие подводные аппараты, которые функционируют по прямому назначению, не имея связи в виде кабель–троса или каната с обслуживающим судном, неавтономные (привязные) такую связь имеют.
В свою очередь, неавтономные привязные подводные аппараты могут быть буксируемыми и самоходными. Последние подводные аппараты за рубежом получили название Remote Operated Vehicle (ROV).
В привязных подводных аппаратах связь в виде кабель–троса позволяет создать проводной канал энергообеспечения от судна–носителя к аппарату и каналы телеуправления и передачи информации.
Полуавтономными называют такую разновидность необитаемых аппаратов, у которых энергообеспечение автономное, а система управления и связи – проводная (в основном на основе волоконнооптической линии).
Схематически описанная классификация представлена на рис. 5.100.
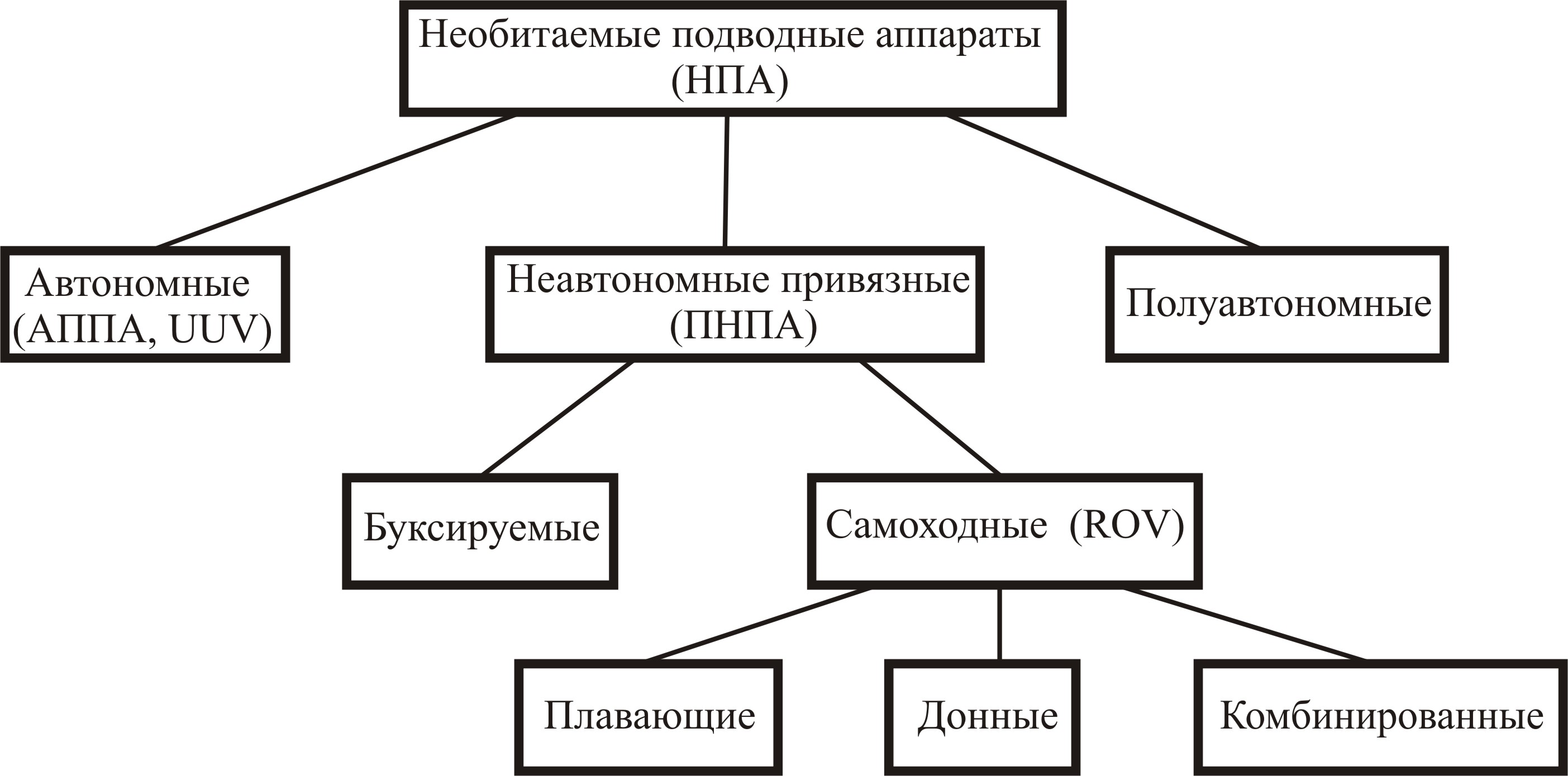
Рис. 5.100 Необитаемые подводные аппараты (НПА)
Дальнейшая классификация неавтономных подводных аппаратов по целевому назначению и особенностям технического обеспечения предложена [Бочаров]:
1. Подводные микроаппараты (ПМА, micro – ROV) оформились относительно недавно, и этот класс охватывает аппараты массой до 5 кг. Они обычно предназначены для обзорно-поисковых работ на глубинах 100…150 м.
2. Подводные малогабаритные аппараты (mini – ROV). Это, как правило, самоходные аппараты массой 5…30 кг.
3. Основной класс, предназначенный для поисковых, инспекционных и осмотровых задач, выполнение легких механических работ в толще воды и определение параметров водной среды. Типичные характеристики этого класса аппаратов: максимальная рабочая глубина до 3000 м (в основном до 1000 м); радиус действия от обеспечивающего судна 100…150 м (редко до 1000 м); скорость подводного хода 1…2,5 уз; масса от 20 до 350 кг.
4. Рабочие аппараты, предназначенные для выполнения широкого спектра подводно-технических работ (поисковых, аварийно-спасательных, инженерно-строительных и ремонтных). Их масса от 30 до 6000 кг. Оснащены эти подводные аппараты достаточно сложным навесным оборудованием.
5. Донные самоходные НПА – аппараты на гусеничном ходу, предназначенные для проведения тяжелых механических работ на морском дне.