

Емкостные первичные преобразователи
Емкостной преобразователь представляет собой конденсатор, имеющий два электрода площадью S, разделенных слоем диэлектрика толщиной д с абсолютной диэлектрической проницаемостью Еа.
Заряд конденсатора определяется по формуле q = CU,
где q - заряд на каждой из пластин конденсатора, [q) = Кл~ С = вQ д - емкость конденсатора, [С] = Ф; на = Еео - абсолютная диэлектрическая проницаемость, [eQ) = Ф/м; но = 8,85 ~ 10-'2 Ф/м - электрическая постоянная - абсолютная диэлектрическая проницаемость вакуума; в - относительная диэлектрическая проницаемость диэлектрика, н >_ 1; U - разность потенциалов, или напряжение на конденсаторе, [ U) = В.
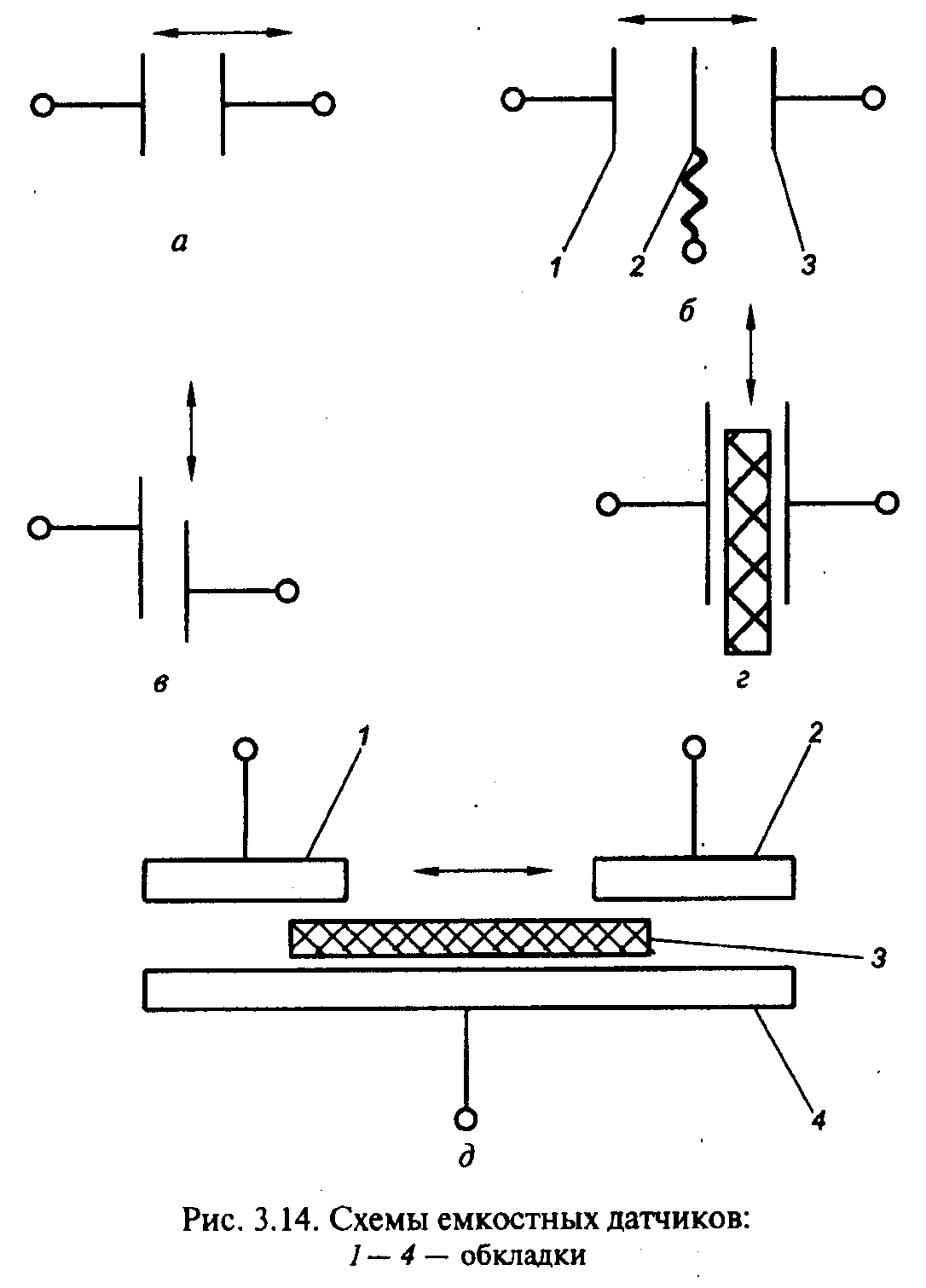
При изменении емкости С за счет изменения расстояния между электродами д, их площади S или средней диэлектрической проницаемости пространства между ними ЕД в цепи конденсатора возникает электрический ток I = Oql~t . На этом основано действие емкостных измерительных преобразователей. Емкость С и реактивное сопротивление Zc = ~ конденсатора в цепи переменного тока с круговой частотой w = 2~f могут изменяться при перемещении щупа и изменении зазора между обкладками (рис. 3.14, а). Это датчики для измерения перемещений 0,001...1 мм. Рис. 3.14, б иллюстрирует работу дифференциального преобразователя, в котором подвижная обкладка 2 перемещается щупом между неподвижными обкладками 1 и 3. Диэлектриком является воздух. При перемещении обкладки 2 влево емкость между обкладками 1 и 2 растет, между 2 и 3 - убывает. Емкостные преобразователи с переменным зазором отличаются высокой чувствительностью (до 500 В/мм), линейной зависимостью сопротивления от зазора, малыми погрешностями и простотой конструкции. Они применяются для измерения малых перемещений. Емкость С и реактивное сопротивление Z~ могут изменяться при перемещении щупа и изменении площади пластин конденсатора вследствие сдвига обкладок относительно друг друга (рис. 3.14, в). Это датчики для измерения перемещений более 1 мм. Достоинством таких преобразователей является возможность соответствующим выбором формы подвижной и неподвижной пластин получить заданную функциональную зависимость между изменением емкости и входным перемещением. Еще один вариант конструкции емкостного датчика: емкость С и реактивное сопротивление конденсатора Z~ реагируют на перемещение щупа и изменение средней диэлектрической проницаемости за счет перемещения диэлектрика между обкладками (рис. 3.14, г). Датчики такой конструкции удобны, когда оказывается нежелательным электрическое соединение щупа с подвижной пластиной преобразователя. Рис. 3.14, д иллюстрирует работу дифференциального преобразователя, в котором подвижный элемент 3 из диэлектрика (например, кварца) перемещается щупом между неподвижными обкладками 1, 2 и 4. При перемещении щупа влево подвижный элемент заполняет пространство между обкладками 1 и 4. Так как н диэлектрика больше н воздуха, то средняя вQ и емкость между обкладками I и 4 растут, в то время как емкость между обкладками 2 и 4 падает.
Естественной входной величиной емкостного преобразователя является перемещение, естественной выходной величиной - его непрерывно меняющаяся емкость и реактивное сопротивление, поэтому эти датчики относятся к аналоговым параметрическим. В качестве измерительных цепей используются неравновесные мосты переменного тока в сочетании с дифференциальным преобразователем, емкости которого являются активными плечами моста.
В качестве пассивных плеч используются низкоомные резисторы, полуобмотки трансформатора или индуктивности.
Емкость большинства емкостных преобразователей очень мала и составляет 10...100 пФ, поэтому даже на высоких частотах их реактивное сопротивление велико (103... 107 Ом), ток в измерительной цепи и мощность выходного сигнала малы, что требует использования усилителя, соединенного с преобразователем с помощью экранированного или коаксиального провода. И экранированный, и коаксиальный провод снижают электромагнитные наводки, однако сами они обладают значительной емкостью между жилой и заземленным экраном. Все это усложняет измерительную цепь и снижает чувствительность и быстродействие измерительного прибора.
Таким образом, основной проблемой при создании емкостных измерительных приборов является устранение погрешности за счет емкости соединительного провода в сочетании с эффективной защитой слабого полезного сигнала от электромагнитных помех на соединительном проводе. Для уменьшения сопротивления преобразователя частота питающего напряжения составляет обычно 105...10' Гц (не меньше 500 Гц).
Такие датчики являются дискретными, инкрементными, параметрическими.
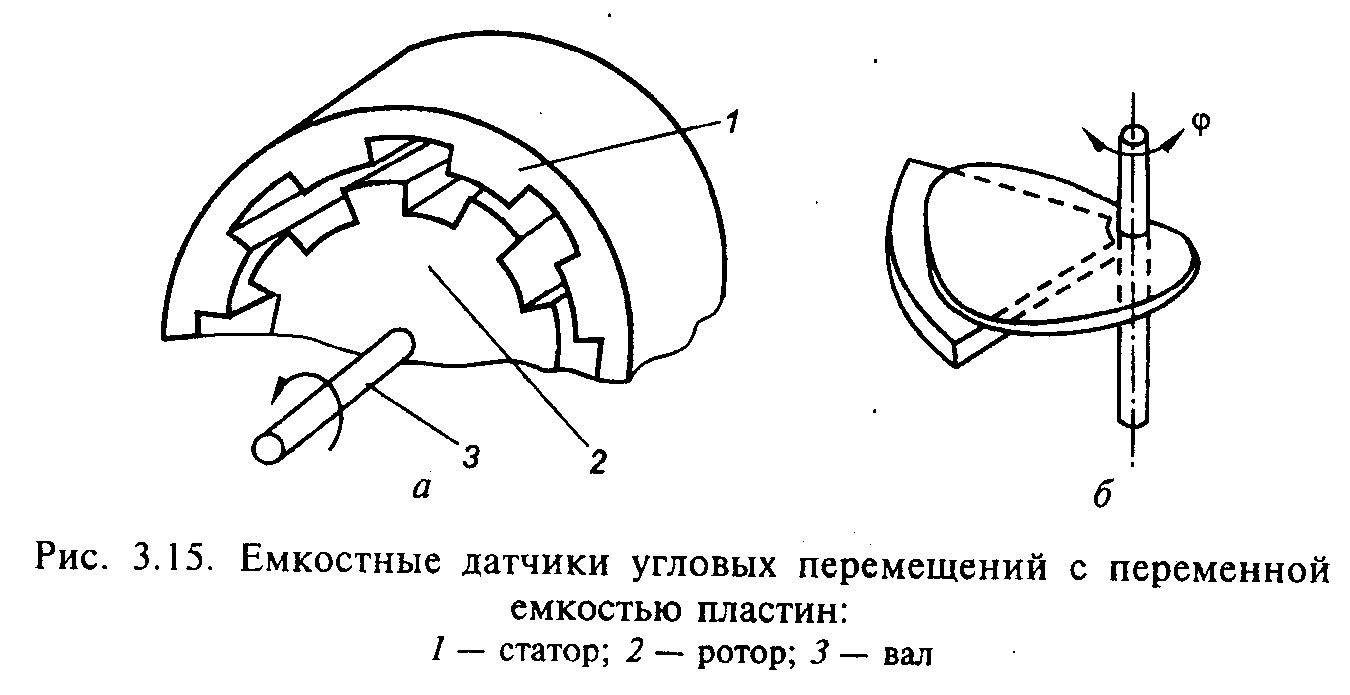
На рис. 3.15, а приведен емкостной инкрементный датчик с переменной площадью пластин, используемый для измерения больших угловых перемещений, например угла поворота валапривода подач станка. Ротор 2, жестко скрепленный с валом 3, перемещается относительно статора 1 так, что длина зазора между ними остается постоянной, а ширина меняется периодически, вызывая периодическое изменение емкости преобразователя. На рис. 3.15, б приведена схема абсолютного датчика для измерения небольших угловых перемещений. Емкостные датчики применяются для измерения уровня токонепроводящих жидкостей и сыпучих тел, толщины различных тел и покрытий в процессе их изготовления, а также линейных и угловых перемещений в широком диапазоне.