

2.1.2. Поиск по деформируемому многограннику
Практические трудности, возникающие при реализации поиска по правильному симплексу, такие как постоянство величины шага, отсутствие ускорения поиска и трудности при проведении поиска на искривленных поверхностях уровня, привели к необходимости некоторых улучшений метода. Рассмотрим метод поиска, в котором симплекс может изменять свою форму и уже не остается симплексом. Более подходящим для него оказалось название “деформируемый многогранник”.
В методе деформируемого многогранника, как и в предыдущем методе, функция n независимых переменных минимизируется с использованием n+1 вершин многогранника. Вершина, в которой значение функции f(X) максимально, проектируется через центр тяжести оставшихся вершин. Улучшенные значения функции f(X) находятся последовательной заменой точки с максимальным значением f(X) на более “хорошие” точки, пока не будет найден минимум f(X).
Итак, пусть X1, X2,…,Xn+1 – вершины многогранника на некотором этапе поиска. Определим точки Xh и XL, в которых функция имеет соответственно наибольшее и наименьшее значения:
f(Xh)=![]() ,
f(XL)=
,
f(XL)=
![]() .
.
Центр тяжести всех вершин, исключая Xh, определим по формуле
Xn+2= . (2.6)
. (2.6)
Процедура отыскания вершины, в которой f(X) имеет лучшее значение, состоит из четырех операций.
1). Отражение – проектирование точки Xh через центр тяжести Xn+2 в соответствии с соотношением
Xn+3= Xn+2+a×( Xn+2- Xh), (2.7)
где a>0 – коэффициент отражения, Xn+2 – центр тяжести, вычисляемый по формуле (2.6).
2). Растяжение. Если f(Xn+3)£f(XL), то вектор Xn+3- Xn+2 растягивается в соответствии с соотношением
Xn+4= Xn+2+ g×(Xn+3- Xn+2), (2.8)
где g>1 –коэффициент растяжения. Если f(Xn+4)<f(XL), то вершина Xh заменяется на Xn+4 и начинается новый этап поиска снова с операции отражения. В противном случае Xh заменяется на Xn+3 и также осуществляется переход к операции отражения нового этапа.
3). Сжатие. Если f(Xn+3)>f(Xj), "j¹h, то вектор Xh- Xn+2 сжимается в соответствии с формулой
Xn+5= Xn+2+b×( Xh- Xn+2), (2.9)
где bÎ(0;1)- коэффициент сжатия. Вершина Xh заменяется на Xn+5 и выполняется вновь операция отражения на новом этапе поиска.
4). Редукция. Если f(Xn+3)>f(Xh), то все векторы Xj- XL уменьшаютcя, например, в 2 раза с отсчетом от XL в соответствии с формулой
Xj = XL + ( Xj – XL)/2, j=1,...,n+1 (2.10)
Далее возвращаемся к операции отражения для продолжения поиска на новом этапе.
Критерий окончания поиска может быть выбран в виде условия
 , (2.11)
, (2.11)
где e>0– достаточно малое число.
Геометрическая иллюстрация описанных процедур для пространства E2 приведена на рис.2 и 3.
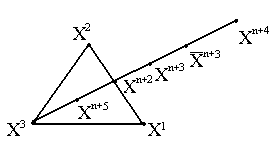
Рис
2. Пробные точки
![]() ,
,
![]() ,
,![]() ,
,![]()
для перехода к новому многограннику.
Так как величина (0;1], то выбор точек и соответствует отражению; (0;1), поэтому выбор точки соответствует сжатию, а 1 и выбор точки приводит к растяжению симплекса.
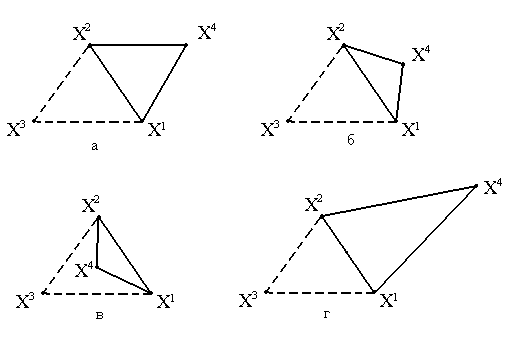
Рис.3. Новые многогранники, полученные в результате процедур отражения
(а,б);
сжатия (в); растяжения (г).
Деформируемый многогранник в отличие от жесткого симплекса адаптируется в процессе поиска к топографии целевой функции, вытягиваясь вдоль длинных наклонных плоскостей, изменяя направление в изогнутых впадинах и сжимаясь в окрестности минимума.