2 Принцип образования механизмов
Механизм состоит из входного звена с одной степенью свободы (рисунок 3а) и присоединяемых к нему и стойке кинематических цепей (структурных групп) с нулевой степенью подвижности относительно тех звеньев, к которым группа присоединяется. Структурную группу с нулевой степенью подвижности называются группой Л.В. Ассура, предложившего метод образования механизмов.
Входное звено, соединенное со стойкой, называют начальным механизмом или механизмом первого класса (рисунок 3а).
Для групп Ассура
![]() .
(5)
.
(5)
Следовательно, присоединение группы Ассура к любому звену не меняет степени свободы всего механизма. В механизме может быть несколько групп Ассура, причем они могут присоединяться непосредственно к начальному звену и стойке, последовательно к предыдущей группе и стойке или последующей группе.
Число
звеньев
и число низших кинематических пар
![]() могут быть только целыми, причем
могут быть только целыми, причем
![]()
![]()
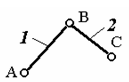
Структурную группу, состоящую из двух подвижных звеньев и трех низших кинематических пар, называют двухповодковой (рисунок 3б) или
г руппой
Ассура второго класса. Класс группы
определяется классом наивысшего по
классу контура, входящего в его состав.
Класс контура определяется количеством
кинематических пар, в которые входят
образующие его звенья (рисунок 3в,г). На
рисунке 3в приведена трехповодковая
или группа Ассура третьего класса. На
рисунке 3г приведена группа Ассура
четвертого класса.
руппой
Ассура второго класса. Класс группы
определяется классом наивысшего по
классу контура, входящего в его состав.
Класс контура определяется количеством
кинематических пар, в которые входят
образующие его звенья (рисунок 3в,г). На
рисунке 3в приведена трехповодковая
или группа Ассура третьего класса. На
рисунке 3г приведена группа Ассура
четвертого класса.
На
рисунке 4
изображена
схема механизма с
![]() ,
состоящего из входного звена с
и двух двухповодковых групп с
,
состоящего из входного звена с
и двух двухповодковых групп с
![]() .
.

Рисунок 4 – Пример образования плоского шестизвенного механизма.
На
рисунке 5
приведена
схема механизма с
,
образованного из входного звена с
и одной группы третьего класса с
![]() .
.
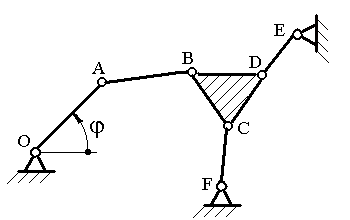
Рисунок 5 – Кинематическая схема механизма третьего класса.
Порядок выполнения работы
1. Изобразить кинематические схемы предложенных механизмов согласно ГОСТ 2.770-68.
2. Рассчитать число степеней свободы механизмов и число избыточных связей по формулам (1), (2) для пространственных механизмов и по формулам (3), (4) для плоских механизмов.
3. Разбить рычажный механизм на входное звено и группы Ассура с нулевой степенью подвижности. Начертить это звено и группы Ассура отдельно. Провести структурный анализ групп Ассура.
4. Классификацию звеньев, кинематических пар и структурных групп исследуемых механизмов привести в виде таблиц 1 – 3.
Таблица 1 – Классификация звеньев механизма
№ пп |
Название |
Условное обозначение |
Движение |
Особенности |
1 |
Стойка |
|
Нет |
|
2 |
Кривошип |
|
Вращательное |
Полный оборот |
3 |
И т.д. |
|
|
|

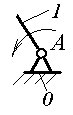
Таблица 2 – Классификация кинематических пар
№ пп |
Название |
Условное обозначение |
Элемент пары (высшая, низшая) |
Класс пары |
Замыкание (геометрическое -Г, силовое - С) |
1 |
Вращательная |
|
Поверхность, низшая |
5 |
Г |
2 |
И т.д. |
|
|
|
|

Таблица 3 – Классификация структурных групп рычажных механизмов
№ пп |
Условное обозначение |
Номера звеньев, образующих группу |
Класс группы |
Порядок |
Вид группы |
1 |
|
1-2 |
2 |
2 |
1 |
И т.д. |
|
|
|
|
|