

42.4.5 Further use of Pointers
The use of STMs and their associated SOHs entails a few additional complications beyond those discussed above. An STM may well be generated by a network element which did not have the privilege of also generating the particular VC4 that it is attempting to load. This immediately introduces the possibility of a slight asynchronism between STM and VC4, and, as with the VC12, this problem is also solved by a slip mechanism plus pointer. The pointer bytes occupy defined positions within the SOH and indicate the offset, in bytes, between themselves and the first byte of the VC4 POH. The main difference between this and the VC12 pointer is that when a VC4 slips its phase relative to the STM SOH, it does so by three bytes at a time, rather than the single byte phase change experienced by the VC12.
A second difference between this case, and that of a VC12, is that the combination of a VC4 plus its pointer is known as an Administrative Unit 4 (AU4), rather than a TU4, when the pointer is located in an STM. The AU4 is used in all CEPT countries as the size of traffic block on which networks are planned and operated. There is also an AU3, which is used mainly in North America. This refers to an alternative construction of an STM, whereby the payload consists not of a single VC4, but instead, of a group of three VC3s, together with their associated pointers. A further difference between the STM SOH and a VC POH is that the SOH can be divided into two parts, known as the Multiplexer Section OverHead (MS OH) and the Regenerator Section OverHead (RSOH). (See Figure 42.12.). The reason for this is that on long line transmission systems the regenerators do not need to perform the rather costly, and in this case, unnecessary operation of generating and destroying the complete SOU. Instead, only a subset of a SOH is processed, leading to a reduction in gate count, power consumption etc., but still preserving the ability to detect traffic errors and access some management channels. On the other hand, the line terminal equipments process both the RSOH and MSOH. (See Figure 42.17.)
Finally, as with VCs, STMs come in various sizes. As mentioned earlier, the smallest size is termed an STM-1, and can accommodate a single VC4. However, larger sizes exist whose hit rates are integer multiples of the basic STM-1 rate. CCITT G.707 currently recognises the STM-4 and STM-16, but STM-12 based network elements are also being designed, and it is likely that STM-64 will become a de facto standard in the near future. For all these higher rate STMs, the construction mechanism is the same: The payload is produced by straight byte interleaving of the tributary VC4s, while the SOH is constructed in a more complicated way, particularly in relation to the way the error checking bytes are calculated.
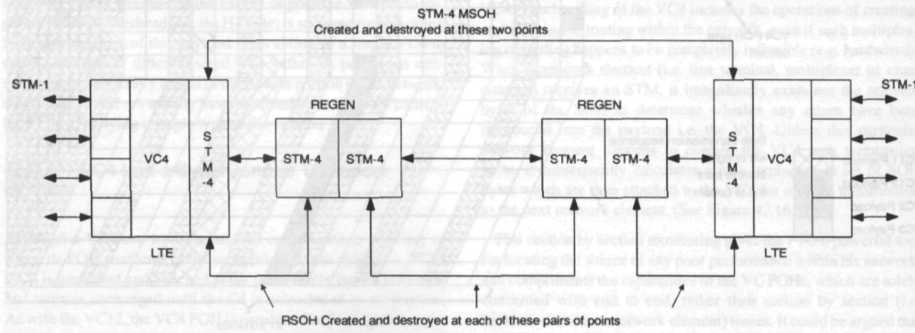
Figure 42.17 Line transmission system showing the multiplexer section overshea (MSOH) operating between LTEs, while only the regenerator section overhead (RSOH) is recalculated between each pair of regenerators
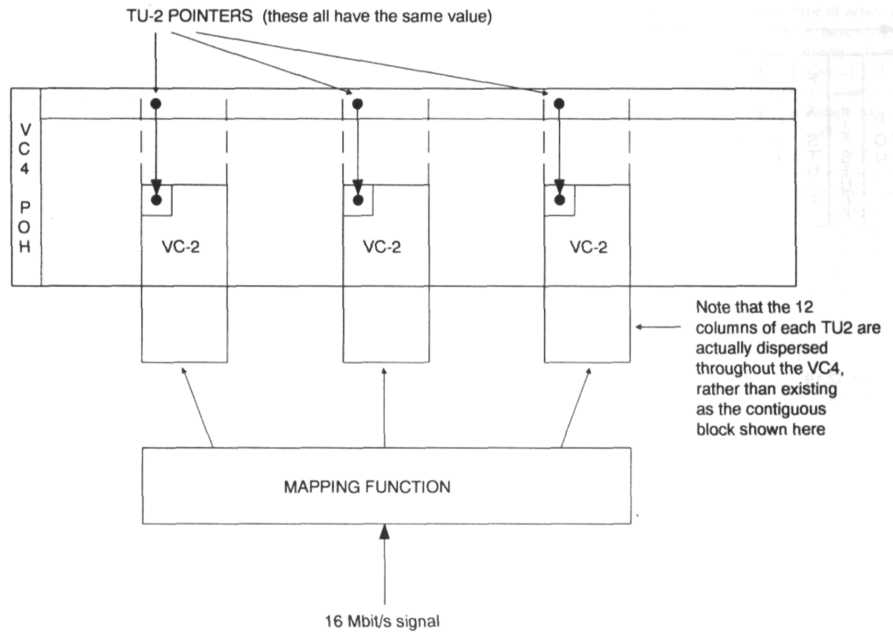
Figure 42.18 Loading of a hypothetical i6Mbit/s signal into 3 concatenated VC-2s (VC2 -3c) within a VC4
1. Learn the following technical words and word-combinations:
42.4.3
1. |
tributary |
второстепенный, подчиненный |
2. |
to serialize |
преобразовывать (из параллельной) в последовательную форму |
3. |
contiguous |
смежный |
4. |
overflow position |
разряд переполнения |
5. |
stuffing |
вставка, подстановка |
6. |
to wander |
отклоняться, смещаться |
42.4.4
7. |
two-dimensional representation |
двумерное представление |
8. |
to traverse |
пересекать, проходить, переходить |
42.4.5
9. |
integer multiples |
целые кратные |
Exercise 2 Read the text 42.4.3- 42.4.5
Exercise 3 Find the Russian equivalents for the following English technical word- combinations:
1. |
to serialize by scanning left to right |
|
2. |
contiguous block of bytes |
|
3. |
overflow byte positions |
|
4. |
VC12 slips phase |
|
5. |
Section Overhead bytes |
|
6. |
Synchronous Transport Module alignment function |
|
7. |
Engineer Oderwire channels |
|
8. |
to entail a few additional complications |
|
9. |
Multiplexer Section Overhead |
|
10. |
Regenerator Section Overhead |
|
11. |
the basic STM-1 rate |
|
12. |
the error checking bytes |
|
13. |
substantial unallocated capacity |
|
14. |
to service future network control requirements |
|
15. |
the payload capacity |
|
16. |
the payload bandwidth of a VC4 |
|
Exercise 4
Find the English equivalents for the following Russian technical word- combinations:
1. двумерный блок битов |
|
2. разрушать данные в другом канале |
|
3. отклоняться по фазе |
|
4. довольно гибкий механизм |
|
5. замена двумерного представления |
|
6. смесь виртуальных контейнеров различных размеров |
|
7. точка окончания тракта |
|
8. ограничения транзитных сетевых элементов |
|
9. синхронизированные каналы сигнализации |
|
10.размер блока трафика |
|
11.обнаружить ошибки трафика |
|
Exercise 5
Answer the following questions:
1.In what way is it helpful to consider the internal structure of the VC4?
2.What is known as a Tributary Unit Group?
3.Is VC 12 the only size of Synchronous Container which has been defined?
4.Do Tributary Unit Groups constitute an extremely flexible mechanism for partitioning the payload bandwidth of a VC4?
5.What is VC 4 POH capable of?
6.How is the combination of the SOH (Section Overhead bytes) plus the VC 4 termed?
7.How can you appreciate the structure of a STM (Synchronous Transport Module)?
8.What is the standard representation of the smallest STM?
9.What is the significance of the STM SOH? What does the handling of the VC 4 include?
10.What happens after a network element receives an STM?
11.What is a powerful tool for locating the source of any poor performance within a network?
12.What can a slight asynchronism between STM and VC 4 introduce? How can this problem be solved?
13.What is the main difference between VC4 POH and VC 12 pointer?
Exercise 6
Make a short report on differences between VC POH and VC 12 pointer (part 42.4.5).
Exercise 7
a) Translate into Russian in writing part 42.4.3 paragraph 1.
b) Translate into Russian in writing part 42.4.3 paragraphs 2,3 (up to “A TUG3 is one third…”).
Part 4(42.4.6-42.4.9)
1. Other sizes of VCs and payloads
2. SONET and SDH
3. NNI Optical Interface standardization
4. SDH network elements