

2.6.3 Визначення динамічних характеристик об’єкта управління без самовирівнювання
по його перехідній характеристиці
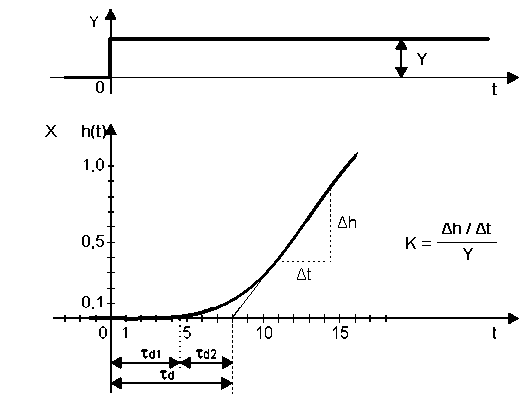
Малюнок 2.6 - Перехідна характеристика (крива розгону) об’єкта без самовирівнювання
Для об’єктів без самовирівнювання стійке функціонування системи без регулятора
неможливо.
Для об'єкту без самовирівнювання
коефіцієнт підсилення визначається як відношення
сталої швидкості зміни вихідної величини Х до величини стрибка вхідного сигналу У:
К = ????????? (2.15)
Величина динамічного запізнювання ?d в об'єкті визначається так, як показано на мал.2.6.
Для регуляторів з релейним виходом на об'єкт подається 100% потужності. У ряді випадків
тривала дія такої потужності неприпустимо. В цьому випадку допускається виключення
нагрівального елементу після визначення ?d і R.
При цьому швидкість зміни температури досить точно можна визначити після досягнення
величиною Х значення Ќ0,3Хуст. Тоді швидкість зміни температури R і постійна часу Т
визначаються по формулах:
R = Дh / Дt (2.16)
Т = Хуст / R (2.17)
2.7 Типові процеси регулювання
При налаштуванні регуляторів можна отримати достатньо велике число перехідних процесів
що задовольняють заданим вимогам. Таким чином, з'являється деяка невизначеність в
виборі конкретних значень параметрів налаштування регулятора. З метою ліквідації цієї невизначеності
і полегшення розрахунку налаштувань вводиться поняття оптимальних типових процесів регулювання.
Для неперервних технологічних процесів промисловості притаманні три оптимальних перехідних процесу регулювання:
Аперіодичний процес з мінімальним часом регулювання вихідної величини об’єкта управління, якій характеризується відсутністю перерегулювання.
Коливальний процес з 20% перерегулюванням.
Коливальний процес з мінімальною квадратичною площею відхилення; цей процес відрізняється найбільшим перерегулюванням.
Вибір того чи іншого типового процесу регулювання визначається тими чи іншими вимогами технологічного процесу. В одному випадку ці вимоги зводяться до забезпечення мінімального значення динамічної похибки регулювання, в другому – до мінімального значення часу регулювання, в третьому – до мінімальної степені коливальності перехідного процесу...
Як відмічалось вище, закон регулювання, як наслідок і тип автоматичного регулятора вибирається з врахування властивостей об’єкта управління і заданих параметрів, заданих параметрів якості перехідного процесу. Властивості об’єкта характеризуються перехідним процесом і його характеристиками. В свою чергу характер перехідного процесу і якість регулювання визначаються як вибраним типом регулятора так і параметром його настройки. Тому після визначення динамічних властивостей об’єкта і необхідної якості регулювання вибирається закон регулювання і визначається параметри настройки регулятора.