

3.3 Багатопозиційні регулятори
Багатопозиційні регулятори застосовують:
для підвищення точності регулювання
· для збільшення реакції системи регулювання і зменшення часу регулювання
· для поліпшення показників якості регулювання.
3.3.1 Призначення. Принцип роботи
Багатопозиційні регулятори забезпечують хорошу якість регулювання для інерційних об'єктів з малим запізнюванням.
Даний тип регуляторів використовується для управління елементами перемикачів -діськретнимі виконавчими пристроями: електромеханічними реле, контакторами, транзисторними ключами, симісторнимі або пристроями тиристорів, твердотільними реле і ін., а також триходовими клапанами, кранами, змішувачами, реверсивними електродвигунами, сервоприводами.
Багатопозиційні регулятори можуть управляти одночасно декількома навантаженнями, наприклад, група Тенов, вентилятори, заслінки і ін.
Багатопозиційний регулятор працює як багатопозиційний перемикач.
Наприклад, температура в камері регулюється двома ТЕНом - одним великої потужності для швидкого виходу на температурний режим камери, іншим - менш могутнім - для підтримки температури в камері, а для пониження температури (охолоджування) використовується вентилятор.
Приклад структурної схеми багатопозиційної системи регулювання приведений на мал. 3.15.

Малюнок 3.15 - Структурна схема багатопозиційної системи регулювання
де: АР - багатопозиційний регулятор, ОУ – об’єкт управління, SP - вузол формування заданої
крапки (завдання), Е - розузгодження регулятора, Pv=x - регульована величина
сигнали Y1 (управління ТЕНом великої потужності), Y2 (управління ТЕНом малої потужності), Y3
(управління вентилятором) - дії, що управляють, Z - збурююча дія.
3.3.2 Алгоритм багатопозиційного регулювання

Алгоритм багатопозиційних регуляторів визначається статичною характеристикою: залежністю вихідних сигналів Yi від вхідного Х. На малюнку 3.16 представлена, як приклад, статична характеристика багатопозиційної системи регулювання.
Логіка роботи багатопозиційного регулятора може бути представлена:
графічно, у вигляді статичної характеристики (наприклад, див. мал. 3.16)
у вигляді таблиці станів (див. таблицю 3.1 для прикладу на рис.3.16).
Таблиця 3.1 - Логіка роботи багатопозиційного регулятора
Область регульованого параметра Х (PV)
|
Вихід Y1
|
Вихід Y2
|
Вихід Y3
|
Примітка
|
X>SP1
|
Відключений
|
Включений
|
Включений
|
|
X<SP1-H1
|
Включений
|
Включений
|
Включений
|
|
X>SP2 |
Відключений |
Відключений |
Включений |
|
X<SP2-H2
|
Відключений
|
Включений
|
Включений
|
|
X>SP3
|
Відключений
|
Відключений
|
Відключений
|
|
X<SP3-H3
|
Відключений
|
Відключений
|
Включений
|
|
Таблиця станів складається з декількох стовпців: Х (PV) - області регульованого параметра Х, стовпців Y1-Y3 - старого і нового стану вихідних сигналів САР.
У таблиці станів, як приклад, вказана логіка роботи двопозиційного регулятора при зворотному типі напряму регулювання. Як логіка роботи вихідних пристроїв може бути використана різна логіка роботи двопозиційних і/або трипозиційних законів регулювання, а також різні напрями регулювання.Найбільший ефект використання таблиці станів досягається при проектуванні і програмуванні дуже складних алгоритмів регулювання.
3.3.3 Зона гістерезису
Ширина зони гістерезису в багатопозиційних регуляторах є програмованим параметром налаштування. Представлення зони гістерезису описується в керівництві по експлуатації на відповідний тип регулятора або систему регулювання.
Докладніший опис представлення зони гістерезису викладено в розділі 3.1.3.
3.3.4 Процеси регулювання з багатопозиційним законом
Процес регулювання (що ідеалізується) з багатопозиційним законом представлений на рис.3.17.
Процес багатопозиційного регулювання, як і всіх позиційних (релейних) законів регулювання, є автоколивальним - регульована величина PV як в перехідному, так і в сталому режимі періодично змінюється щодо заданого значення SP (див. мал. 3.17), тобто регульована величина PV (X) схильна до незгасаючих коливань.
Показниками автоколивального режиму є амплітуда автоколивань Ак і період
автоколивань Тк.

Малюнок 3.17 - Перехідна характеристика багатопозиційного процесу регулювання
В порівнянні з двопозиційними регуляторами, багатопозиційні регулятори мають велику точність регулювання, велику реакцію??????? системи регулювання, менший час регулювання, а також кращі показники якості регулювання.
3.3.5 Параметри налаштування багатопозиційних регуляторів
Уставка спрацьовування вихідного пристрою однієї або декількох зон регулювання.
Ширина зони гістерезису.
Логіка роботи регулятора в кожній зоні окремо. Використовуючи можливість програмування різних параметрів дозволяє створити велику кількість різноманітних багатопозиційних систем регулювання.
3.3.6 Проектування багатопозиційних мікропроцесорних систем управління на базі регуляторов підприємств «ОВЕН», «МІКРОЛ» та ін..:
Переваги багатопозиційних систем управління, реалізованих на двопозиційних і трипозиційних мікропроцесорних регуляторів «ОВЕН», «МІКРОЛ» підприємств представлені в розділі 3.1.6.
3.4 П-, ПІ-, ПД-, ПІД - регулятори
У даному розділі приведені описи алгоритмів роботи і закони регулювання безперервних П-, ПІ-, ПД-, ПІД-регуляторів з різними структурами вихідного сигналу - аналоговим виходом, дискретним (імпульсним) виходом або ШИМ-выходом (широтно імпульсним модульованим сигналом).
Класифікація систем автоматичного регулювання (САР) приведена в таблиці 1.3 разд.1.3.
3.4.1 Типові регулятори і регулювальні характеристики
Для регулювання об'єктами управління, як правило, використовують типові регулятори, назви яких відповідають назвам типових ланок (опис типових ланок представлений в розділі 2.4):
1. П-регулятор, пропорційний регулятор (статичний)
Пропорційними, або статичними, називаються такі регулятори, у яких зміна положення регулюючого органу пропорційна відхиленню регульованого параметра від заданого значення:
х = k∆y
де k — передавальний коефіцієнт регулятора, який є параметром його налаштування.
У пропорційного регулятора швидкість переміщення регулирующего органу пропорційна швидкості зміни регулируемого параметра.
 Величина,
зворотна передавальному коефіцієнту
регулятора l/k, називається статизмом
або коефіцієнтом неравномерности.
Кожному значенню регульованої величини
соответствует цілком певне положення
регулюючого органу. Регулятор, що діє
па такому принципі, називається також
П-регулятором. Рівновага П-регулятора
можлива при различных значеннях
регульованого параметра, внаслідок
чого регульований параметр не
поддерживается на заданому значенні,
а принимает різні сталі значения.
Величина,
зворотна передавальному коефіцієнту
регулятора l/k, називається статизмом
або коефіцієнтом неравномерности.
Кожному значенню регульованої величини
соответствует цілком певне положення
регулюючого органу. Регулятор, що діє
па такому принципі, називається також
П-регулятором. Рівновага П-регулятора
можлива при различных значеннях
регульованого параметра, внаслідок
чого регульований параметр не
поддерживается на заданому значенні,
а принимает різні сталі значения.
Структурна схема П-регулятора є підсилювальною ланкою і може бути представлена у вигляді двох ланок, сполучених послідовно (мал. 6.2, а). Перша ланка з коефіцієнтом підсилення до є усилительным пристроєм, друге — интегрирующим ланкою з передавальною функцією?????
Мал. 3.17.1. Структурна схема і перехідний процесс П-регулятора
а — структурна скема; б — динамічна характеристика
W(P) = 1/(TиР) Для отримання П-закона регулювання ланки регулятора охоплюються жорстким від’ємним зворотним зв'язком з великим коефіцієнтом передачі k0.c. з; тоді W(p)= 1/ k0.c .
Динамічна характеристика П-регулятора має вигляд, зображений на мал. 3.17.1. При зміні вхідної величини х вихідна величина змінюється також стрибкоподібно.
П-регулятори використовуються для управління об'єктами при низькому самовирівнюванні (або без нього), за наявності запізнювання в об'єкті, а також при значних по величині збуреннях. Перевагою П-регулятора є його швидкодія, тобто малий час перехідного процесу, і висока стійкість процесу регулювання. Основним недоліком П-регулятора є наявність залишкового відхилення регульованого параметра, що знижує точність регулювання.
Пропорційно-інтегральні (ізодромні) регулятори. Пропорційно-інтегральні, або ізодромні, регулятори характеризуються тією властивістю, що при відхиленні регулирующей величини від заданого значення регулятор спочатку пере ает регулюючий орган пропорційно зміряному
відхиленню (як статичний регулятор), а потім при підході регульованої величини до заданого значення поволі дово-'iiii її до цього значення (як астатичний регулятор). Таке регулювання виходить достатньо точним і быстродейст-нуютнм.
У світовій практиці форма запису передавального коефіцієнту: WП(s)= K1.
2. І-регулятор, інтегруючий регулятор (астатичний)

Інтегральними, або астатичними, називаються такі регулятори, у яких при відхиленні регульованого параметра від заданого значения регулюючий орган переміщатиметься до тих пір, поки регульований параметр не повернеться до заданого значення. У таких регуляторах швидкість переміщення регулюючого органа пропорційна величині відхилення регульованого параметра від заданого значення: dx/dt = Ти ∆у;
проінтегрувавши цей вираз, отримаємо:
![]()
де Ги — постійна часу, або коефіцієнт пропорційності регулятора; Та є часом, за яке регулюючий орган переміститься з одного крайнього положення в інше при максимальному відхиленні регульованого параметра від заданого значення. Величина, зворотна Ти, пропорційна швидкості переміщення регулюючого органу s = 1/Tи. З цього виразу виходить, що регулююча воздія х пропорційна інтегралу відхилення регульованої величини у від її заданого значення. Регулятор, що діє на такому принципі, називається також І-регулятором і представляет собою інтегруючу ланку, передавальна функція якої
W(p)=1/(Tир).
Мал.
3.17.5
Структурна схема і перехідний процес
І-регулятора
а
- структурна схема б -
динамічна характеристика
І-регулятор достатньо точно підтримує задане значення регульованого параметра, процес регулювання протікає порівняно поволі; тому він використовується в об’єктах з великим самовирівнюванням, з незначним запізненням і з малими по величині збуреннями.
У світовій практиці форма запису передавального коефіцієнту: WИ(s)= K0 / s
3.__Д-регулятор, диференцюючий регулятор
Передавальна функція Д-регулятора: WД(s)= K2 · s. Д-регулятор генерує дію, що управляє, тільки при зміні регульованої веричины: Y= K2 · dE/dt.
На практиці прості П, І, Д регулятори комбінуються в регулятори виду ПІ, ПД, ПІД (див. рис.3.18):

Малюнок 3.18 - Види безперервних регуляторів
ПІ-регулятор, пропорційно-інтегральний регулятор

Залежно від вибраного вигляду регулятор може мати пропорційну характеристику (П), пропорційно-інтегральну характеристику (ПІ), пропорційно-диференціальну характеристику (ПД) або пропорційно-інтегральну (ізодромну) характеристику з дією по похідній (ПІД-регулятор).
ПІ-регулятор, пропорційно-інтегральний регулятор (див. рис.3.18.а)
Р
Мал.3.18а
Пристрій ізодромного зворотнього
зв’язку
 Дію
ізодромного зворотного зв'язку легко
пояснити на прикладі роботи ланцюжка
RC, тим більше що ізодромний зворотній
зв'язок в електричних регуляторах
здійснюється за допомогою такого
ланцюга.
На мал. 6.3 показаний спосіб з’єднань
ланцюга з опору R і ємності С, характеризуючий
пристрій гнучкою пружною (мал. 6.3, б) і
інерційною (мал.
6.З,
а) зворотних зв'язків. При стрибкоподібній
зміні вхідних
Мал. 6.3. Пристрій
ізодромного зворотнього зв'язку
напруг
x0.c,
на виході пристрою зворотного зв'язку
на-
а - інерційний зворотній
зв'язок; б —пружній зворотній
пруга
Vо.с
змінюється
так, як показано на кривих мал. 6.3,
зв'язок; в — динамічна характеристика
інерційного
в і г грам; при цьому
крива мал. 6.3, г відповідає схемі на
зворотного зв'язку; г —динамічна
характеристика
мал. 6.3, б. При
відхиленні сигналу регульованої величини
ре
пружного зворотного
зв'язку
гулятор Р, охоплений ізодромним
зворотним зв'язком, разбалан-
совується,
на його виході з'являється напруга,
що змінюється за
допомогою виконавчого механізму
положення регулирующего органу,
щоб відновити регульовану величину.
??????
Дію
ізодромного зворотного зв'язку легко
пояснити на прикладі роботи ланцюжка
RC, тим більше що ізодромний зворотній
зв'язок в електричних регуляторах
здійснюється за допомогою такого
ланцюга.
На мал. 6.3 показаний спосіб з’єднань
ланцюга з опору R і ємності С, характеризуючий
пристрій гнучкою пружною (мал. 6.3, б) і
інерційною (мал.
6.З,
а) зворотних зв'язків. При стрибкоподібній
зміні вхідних
Мал. 6.3. Пристрій
ізодромного зворотнього зв'язку
напруг
x0.c,
на виході пристрою зворотного зв'язку
на-
а - інерційний зворотній
зв'язок; б —пружній зворотній
пруга
Vо.с
змінюється
так, як показано на кривих мал. 6.3,
зв'язок; в — динамічна характеристика
інерційного
в і г грам; при цьому
крива мал. 6.3, г відповідає схемі на
зворотного зв'язку; г —динамічна
характеристика
мал. 6.3, б. При
відхиленні сигналу регульованої величини
ре
пружного зворотного
зв'язку
гулятор Р, охоплений ізодромним
зворотним зв'язком, разбалан-
совується,
на його виході з'являється напруга,
що змінюється за
допомогою виконавчого механізму
положення регулирующего органу,
щоб відновити регульовану величину.
??????
Одночасно на виході регулятора виникає напруга ізодромного зворотнього зв'язку (конденсатор С заряджається), яка передається на вхід регулятора із зворотним знаком і балансує регулятор. Напруга на виході регулятора стає рівною нулю, серводвигун виконавчого механізма зупиняється. Накопичений заряд на конденсаторі С починає розряджатися через опір R, і напруга ізодромного зворотного зв'язку, прикладена до входу регулятора, поступово зменшується. Якщо сигнал від датчика не прийшов до заданого значення, то наступає такий момент, коли розбіжність на вході приведе знов до спрацьовування регулятора, і знову, заряджає, конденсатор С через деякий час збалансує регулятор. Так буде продовжуватись до тих пір, поки регульована величина не досягне заданого значення. Для контура RC крутизна динамічної характеристики залежатиме від постійної часу Ти , яка називаеться часом ізодрома і рівна Ти=RC.
Такий режим регулювання називаеться пульсуючим. Характер пульсацій міняється залежно від значення регульованої величини і параметрів ізодромного зв'язку. При выбраному значенні часу ізодрому Ти відношення між тривалістю роботи і зупинки, а отже, і середня швидкість виконуючого механізму залежать від величини і швидкості відхилення регульованої величини.
Динамічними параметрами налаштування є передаточный коефіцієнт k і час ізодрома Ти. ПІ-регулятор описується рівнянням
![]()
рівняння складається з двох складових — пропорційної і інтегральної; цей вираз можна представити так:
![]()
тобто швидкість переміщення регулюючого органу пропорційна відхиленню і швидкості зміни регульованого параметра.
Мал. 6.4. Структурна схема і перехідний процес ПІ-регулятора
а — структурна схема; б —динамічна характеристика
ПІД-регулятор, пропорційно-інтегрально-диференціальний регулятор.
ПІД-регулятори здійснюють закон регулювання, в якому регулюючий орган переміщається пропорційно відхиленню, інтегралу і швидкості відхилення регульованого параметра:
![]()
Швидкість переміщення регулюючого органу пропорційна відхиленню, швидкості відхилення і прискоренню відхилення регульованого параметра:
![]()
Де k-- коефіцієнт передачі регулятора; Ти — час ізодрома; Тп— час передування?????. Знак «плюс» або «мінус» вказує на те, що передування??? може бути прямим або зворотнім. Таким чином, ПІД-регулятор має три параметри налаштування: k, Ти і Тп
Передавальна функція регулятора
W (p) = k (Ти·Тп·Р2+Ти·Р+1) / (Ти·Р)
Передування може здійснюватися як шляхом підключення на вхід регулюючого приладу чутливих елементів, вимірюючих швидкість зміни регулюємої величини, так і введенням зворотнього зв'язку.
На мал. 6.5, а зображений електричний ланцюг, що складається з опорів R1 і R2, конденсаторів С1 і С2 і що представляє два послідовно включених пристрої інерційного зворотного зв'язку. Така схема має дві залежні друг від друга постійні часу, з яких одну називають часом ізодрома Ті, а другу-—часом передування Тп. Величини цих постійних часу ??????????
Мал. 6.5. Пристрій зворотнього зв'язку з передуванням, а -зворотній зв'язок з передуванням; б - динамічна характеристика зворотнього звязку
Мал. 6.6. Структурна схема і перехідний процес ПІД-регулятора
а -структурная схема; б -динамічна характеристика сигналу на вході пристрою. З графіка видно, що дія такого зворотного зв'язку в перший момент часу сповільнена, тому вона отримала назву зворотного зв'язку, що запізнювався. Регулятор з передуванням також може забезпечити пульсуючий режим.

У світовій практиці форма запису передавального коефіцієнту: WПИД(s)= K1 + K0 / s + K2 s.
Мал.6.5 Мал.6.6
3.4.2 Структурні схеми безперервних регуляторів
У даному розділі приведені структурні схеми безперервних регуляторів з аналоговим виходом -рис.3.19, з імпульсним виходом - рис.3.20 і з ШИМ (широтно імпульсним модульованим) виходом -рис.3.21.
В процесі роботи система автоматичного регулювання АР (регулятор) порівнює поточне значення вимірюваного параметра Х, отриманого від датчика Д, із заданим значенням (завданням SP) і усуває розбіжність регулювання E (Е=sp-pv). Зовнішні збурюючі дії Z також усуваються регулятором. Робота приведених структурних схем відрізняється методом формування вихідного сигналу регулятора, що управляє.
Безперервний регулятор з аналоговим виходом
Структурна схема безперервного регулятора з аналоговим виходом приведена на рис.3.19.
Вихід Y регулятора АР (наприклад, сигнал 0-20мА, 4-20мА, 0-5мА або 0-10В) впливає через електропневматичний перетворювач Е/р сигналів (наприклад, з вихідним сигналом 20-100кПа) або електропневматичний позиційний регулятор на виконавський елемент До (регулюючий орган).

Малюнок 3.19 - Структурна схема регулятора з аналоговим виходом де: АР – безперервний ПІД-регулятор з аналоговим виходом, SP – вузол формування заданої точки, PV=X – регульований технологічний параметр, Е – розбіжність регулятора, Д – датчик, НП – нормуючий перетворювач
(у сучасних регуляторах є вхідним пристроєм) Y – вихідний аналоговий сигнал Е/р, що управляє, - електропневматичний перетворювач, До – клапан регулюючий (регулюючий орган).
Безперервний регулятор з імпульсним виходом
Структурна схема безперервного регулятора з імпульсним виходом приведена на рис.3.20.
Вихідні сигнали регулятора, що управляють, - сигнали Більше і Менше (транзистор, реле, семістор) через контактні або безконтактні пристрої (П), що управляють, впливають на виконавчий елемент П (регулюючий орган).

Малюнок 3.20 - Структурна схема регулятора з імпульсним виходом де: АР – безперервний ПІД-регулятор з імпульсним виходом, SP – вузол формування заданої точки, PV=X – регульований технологічний параметр, Е – розбіжність регулятора, Д – датчик, НП – нормуючий перетворювач
(у сучасних регуляторах є вхідним пристроєм) ІМП - імпульсний модулятор ШИМ, що перетворює вихідний сигнал Y в послідовність
імпульсів з шпаруватістю, пропорційною вихідному сигналу: Q=|Y|/100. Сигнали «Більше» і «Менше» – дії, що управляють, П – пускач контактний або безконтактний, До – клапан регулюючий (регулюючий орган).
Безперервний регулятор з ШИМ (широтно -імпульсним модульованим) виходом
Структурна схема безперервного регулятора з ШИМ (широтно- імпульсним модульованим) виходом приведена на рис.3.21.
Управляючий вихідний сигнал регулятора (транзистор, реле, симістор), через контактні або безконтактні пристрої (П), що управляють, впливають на виконавчий елемент До (регулюючий орган).????????????????????????????????????????????????????????
Безперервні регулятори з ШИМ виходом широко застосовуються в системах регулювання температури, де вихідний керівник симисторный елемент (або твердотільне реле, пускач) впливають на термоелектричний нагрівач ТЕН, або вентилятор.
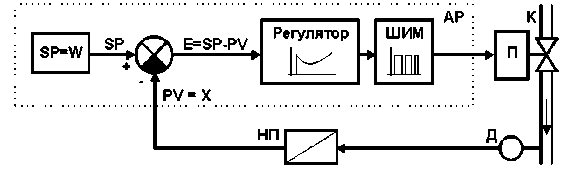
Малюнок 3.21 - Структурна схема регулятора з ШИМ виходом де: АР – безперервний ПІД-регулятор з імпульсним виходом ШИМ, SP – вузол формування заданої точки, PV=X – регульований технологічний параметр, Е – розузгодження регулятора, Д – датчик, НП – нормуючий перетворювач
(у сучасних регуляторах є вхідним пристроєм) ШИМ - імпульсний модулятор ШИМ, що перетворює вихідний сигнал Y в послідовність
імпульсів з шпаруватістю, пропорційною вихідному сигналу: Q=|Y|/100. П – пускач контактний або безконтактний, До – клапан регулюючий (регулюючий орган).
3.4.3 Узгодження вихідних пристроїв безперервних регуляторів
Вихідний сигнал регулятора має бути узгоджений з виконавчим механізмом і виконавчим пристроєм.
Відповідно до виду приводу і виконавчого механізму необхідно використовувати вихідний пристрій безперервного регулятора відповідного типу, див. таблицю 3.1.
Таблиця 3.1 - Узгодження вихідних пристроїв безперервних регуляторів
Вихідний пристрій неперервного регулятора |
Тип вихідного пристрою |
Закон регулювання |
Виконуючий механізм або пристрій |
Вид приводу |
Регулюючий орган |
Аналоговий
|
ЦАП з виходом
|
П-, ПІ-
|
Перетворювачі |
Пневматичні
|
|
вихід
|
0-5мА, 0-20мА
|
ПД-, ПІД-
|
|
Старанні???
|
|
|
4-20мА, 0-10В
|
закон
|
позиційні регулятори электро-пневматичні і гідравличні
|
приводи (із стислим повітрям як допоміжна енергія) і электро-пневматичні перетворювачі сигналів або электро-пневматичні позиційні регулятори, електричні (частотні приводу)
|
|
Імпульсний
|
Транзистор
|
П-, ПІ-
|
Контактні
|
Електричні
|
|
вихід
|
реле, симістор
|
ПД-, ПІД-
|
(реле) і
|
приводи (з
|
|
|
|
закон
|
безконтактні (семісторні) пускачі
|
редуктором), в т.ч. реверсивні
|
|
ШИМ вихід
|
Транзистор
|
П-, ПІ-
|
Контактні
|
|
Термо-
|
|
реле, семістор
|
ПД-, ПІД-
|
(реле) і
|
|
електричний
|
|
|
закон
|
безконтактні (симисторные) пускачі
|
|
нагрівач (ТЕН) і ін.
|
3.4.2 Реакція регулятора на одиничну ступінчасту дію
Однією з динамічних характеристик об’єкта управління є його перехідна характеристика - реакція об’єкта на одиничну ступінчасту дію (див. розділ 2.3), наприклад, зміна заданої точки регулятора.
У даному розділі приведені перехідні процеси системи управління при одиничній ступінчастій зміні заданої точки при використанні регуляторів з різним законом регулювання.
Якщо на вхід регулятора подається стрибкоподібна функція зміни заданої точки - див. мал. 3.19, то на виході регулятора виникає реакція на одиничну ступінчасту дію відповідно до характеристики регулятора у функції часу.

Малюнок 3.19 - Одинична ступінчаста дія стрибкоподібна функція зміни заданої точки регулятора
3.4.2.1 П-регулятор, реакція на одиничну ступінчасту дію
Параметрами П-регулятора є коефіцієнт підсилення Кр і робоча точка Y0.
Робоча точка Y0 визначається як значення вихідного сигналу, при якому розбіжність регульованої величини дорівнює нулю. При впливі збурюючих дій виникає, залежно від Y0, відхилення регулювання.

Малюнок 3.20 - П-регулятор. Реакція на одиничну ступінчасту дію
3.4.2.2 ПІ-регулятор, реакція на одиничну ступінчасту дію
На відміну від П-регулятора у ПІ-регуляторі, завдяки інтегральній складовій, виключається відхилення регулювання.
Параметром інтегральної складової є час інтеграції Tі.

Малюнок 3.21 - ПІ-регулятор. Реакція на одиничну ступінчасту дію
3.4.2.3 ПД-регулятор, реакція на одиничну ступінчасту дію
У ПД-регуляторов пропорційна складова накладається на затухаючу диференціальну складову.
Д-складова визначається через посилення попередження Vд і час диференціювання Tд.

Малюнок 3.22 - ПД-регулятор. Реакція на одиничну ступінчасту дію
3.4.2.4 ПІД-регулятор, реакція на одиничну ступінчасту дію
Завдяки додатковому підключенню Д-складової, ПІД-регулятор досягає поліпшення динамічної якості регулювання. Див. ПІ-регулятор, ПД-регулятор.

Малюнок 3.23 - ПІД-регулятор. Реакція на одиничну ступінчасту д
3.5 Адаптивні регулятори
Ряд сучасних мікропроцесорних приладів автоматично розраховують коефіцієнти налаштування регуляторів, такі регулятори називаються адаптивними. Адаптація проводиться:
в процесі виведення стану об'єкту на нову задану точку SP. В цьому випадку говорять про самонастроювання або самооптимізацію;
В процесі стабілізації стану об'єкту. В цьому випадку говорять про адаптивне управління. Адаптивне управління, яке, за самим визначенням цього терміну, повинне забезпечити стеження параметрів налаштування регулятора за властивостями об'єкту управління, що безперервно змінюються. Адаптивні регулятори дозволяють поліпшити якість регулювання температури, наприклад, при зміні завантаження печі і зміні стану нагрівального елементу в процесі експлуатації.
Проте можна відзначити і недоліки адаптивних систем:
• У разі дуже великих збурюючих дій параметри налаштування можуть збитися і система на якийсь час може перейти в коливальний режим із значеннями, що перевищують межі регулюємої величини PV.
• Вбудовані алгоритми адаптації проводять ідентифікацію не всіх типів об’єктів управління. Тому, перш, ніж проектувати систему управління, необхідно в технічній документації (або отримати консультацію у виробника устаткування) уточнити типи об’єктів, які може ідентифікувати та або інша система адаптивного регулювання.
• Методи зміни вихідного сигналу, що управляє, в процесі ідентифікації об’єкта можуть мати необоротні наслідки для технологічного процесу. Наприклад, при самоналаштуванні регулятор може повністю відкрити або повністю закрити клапан (регулюючий орган), або подача вхідних гармонійних (синусоїдальних) сигналів може ввести процес регулювання в автоколивальный режим.
У зв'язку з цим, на етапі проектування системи управління (а не на етапі пуско-налагоджувальних робіт) необхідно уточнити наступні питання сумісності:
-наскільки вірно вибраний метод самонастройки для даного процесу або об’єкта регулювання?
- наскільки може об’єкт управління бути настроєний даним типом алгоритму само настройки?
- наскільки допустимі методи і діапазони зміни вихідного сигналу регулятора в процесі самонастройки?
У будь-якому випадку для установки адаптивних систем (деяких виробників) потрібне хоч би грубе завдання деяких параметрів:
-частоти опитування
-максимального і мінімального значення регульованої величини
-часу регулювання
-заданого значення перерегулювання
-припустимого значення зміни вихідного сигналу
-зони нечутливості і ін.
4. ВИБІР ЗАКОНУ РЕГУЛЮВАННЯ І ТИПУ РЕГУЛЯТОРА
4.1 Завдання вибору закону управління і типу регулятора
Завдання вибору закону управління і типу регулятора полягає в наступному – необхідно вибрати такий тип регулятора, який при мінімальній вартості і максимальній надійності забезпечував би задану якість регулювання. Можуть бути вибрані релейні, безперервні або дискретні (цифрові) типи регуляторів.
Для того, щоб вибрати тип регулятора і визначити його параметри налаштування необхідно знати:
-Статичні і динамічні характеристики об'єкту управління.
-Вимоги до якості процесу регулювання.
-Показники якості регулювання для безперервних регуляторів.
-Характер збурень, що діють на процес регулювання.
Вибір типу регулятора зазвичай починається з простих двопозиційних регуляторів і може закінчуватися самоналагоджувальними мікропроцесорними регуляторами. Необхідно відмітити, що по вимогах технологічного регламенту багато об'єктів не допускають застосування регуляторів релейної дії, так як в цьому випадку регулюючий орган постійно займає крайні положення.
4.2. Визначення динамічних характеристик об'єкту регулювання
Для визначення динамічних характеристик об'єкту регулювання - коефіцієнта посилення (передачі) об'єкту Ко, постійної часу об’єкта Тс і запізнювання ?d на практиці частіше користуються експериментальними методами, оскільки залежність між вхідною і вихідною величинами (перехідна характеристика або крива розгону) легко отримати саме таким способом, див. розділ 2.6.
4.3. Показники якості процесу регулювання для неперервних регуляторів.
Типові процеси регулювання і показники якості безперервних регуляторів представлені в розділах 2.7, 2.10. Як безперервні регулятори передбачається використовувати регулятори, що реалізовують І, П, ПІ, ПД і ПІД - закони управління. Теоретично, з ускладненням закону регулювання якість роботи системи поліпшується.
Відомо, що на динаміку регулювання найбільший вплив робить величина відношення запізнювання до постійної часу об'єкту ?d /Тс, і є ступенем трудності регулювання об'єкту. Ця величина дорівнює перехідному відхиленню регульованого параметра X у відсотках від заданого значення SP, коли величина зовнішньої регулюючої дії Y складає 1 % від діапазону регулювання.
Ефективність компенсації ступінчастого обурення регулятором достатньо точно може характеризуватися величиною динамічного коефіцієнта регулювання Rd, а швидкодія - часом регулювання tр.
4.4 Рекомендації по вибору закону регулювання і типу регулятора
Мінімальний можливий час регулювання tр для різних законів регулювання і типів регуляторів при оптимальному їх налаштуванні визначається таблицею 4.1.
Теоретично, в системі із запізнюванням, мінімальний час регулювання tp min.= 2 ?d.
У таблиці 4.1 приведені рекомендації по вибору закону регулювання і типу регулятора виходячи з величини відношення запізнювання ?d до постійної часу об'єкту Тc.
Якщо ?d /Т < 0,2, то можна вибрати релейний, безперервний або цифровий регулятори.
Якщо 0,2 < ?d /Т < 1, то має бути вибраний безперервний або цифровий, ПІ-, ПД-, ПІД-регулятор.
Якщо ?d /Т > 1, то вибирають спеціальний цифровий регулятор з упредителем, який компенсує запізнювання в контурі управління. Проте цей же регулятор рекомендується застосовувати і при менших стосунках ?d /Т.
Таблиця 4.1 - Вибір закону регулювання і типу регулятора по відношенню τd /Т і tр / τd
Співвідношення τd /Т |
Співвідношення t /τd |
Характеристика об’єкта
|
Закон регулювання і тип регулятора
|
|
по запізнюванню і інерційності
|
по ступеню регулюємости
|
|||
0<τd /Т<0,05 |
|
Без запізнювання
|
Дуже добре регульований
|
Релейний, безперервний П-, ПІ-, ПД-, ПІД-регулятор
|
0,05<τd /Т<0,1 |
|
З великою інерційніс- тю і з малим запізнюванням
|
Дуже добре регульований
|
Релейний, безперервний П-, ПІ-, ПД-, ПІД-регулятор
|
0,1<τd /Т<0,2 |
|
З істотним транспортним запізнюванням
|
Добре регульований
|
Релейний, безперервний П-, ПІ-, ПД-, ПІД-регулятор
|
0,2<τd /Т<0,4 |
|
З істотним транспортним запізнюванням
|
Ще регульований
|
Безперервний або цифровий ПІ-, ПД-, ПІД-регулятор
|
0,4<τd /Т<0,8 |
|
З істотним транспортним запізнюванням
|
Важко регульований
|
Безперервний або цифровий ПІ-, ПД-, ПІД-регулятор
|
0,8<τd /Т<1 |
|
З великим транспортним запізнюванням
|
Дуже важко регульований
|
Безперервний або цифровий ПІ-, ПД-, ПІД-регулятор
|
τd Т>1 |
|
З великим транспортним запізнюванням
|
Дуже важко регульований
|
Цифровий регулятор з упредителем
|
|
t /τd ≥ 6,5 |
|
|
Безперервний або цифровий, П-регулятор
|
|
t /τd ≥ 12 |
|
|
Безперервний або цифровий, ПІ-регулятор
|
|
t /τd ≥ 7 |
|
|
Безперервний або цифровий, ПІД-регулятор
|
Примітки. 1. tр – час регулювання, d – запізнення в об’єкті, Тс – постійна часу об’єкту. 2. Релейний регулятор - двухпозиційний, трьохпозиційний, багатопозиційний регулятор. |
||||
На параметри об'єкту значний вплив робить взаємне розташування виконавчих органів (наприклад, Тена) і первинного перетворювача (датчика).
Наявність запізнювання об'єкту різко погіршує динаміку замкнутої системи. Часто при відношенні d /Т > 0,5 типові закони управління не можуть забезпечити високу точність і швидкодію процесу регулювання. Головною причиною тут є різке зниження критичного коефіцієнта посилення системи при збільшенні запізнювання в об'єкті управління.
У зв'язку з цим підвищити якість управління можна або шляхом зменшення запізнювання в об'єкті, або за рахунок застосування регулятора складнішої структури, а саме оптимального регулятора.
З теорії оптимального управління виходить, що такий регулятор в своїй структурі повинен містити модель об'єкту управління.
Системи управління з моделлю об'єкту володіють можливістю передбачати майбутні зміни стану об'єкту. Вони можуть бути адаптивними чи ні і незамінні для об'єктів з істотним часом запізнювання d /Т > 0,2.
Перераховані в таблиці. 4.1 об'єктів регулювання з відношенням d /Т < 0,2 стійкі і володіють самовирівнюванням.
Існують нестійкі об'єкти без самовирівнювання.
. Наприклад, вентилятор з асинхронним електродвигуном з жорсткою характеристикою. При зміні напруги живлення двигун або знаходиться в загальмованому стані, або розгоняється до номінальних оборотів.
Для кожного об'єкту управління необхідно застосовувати регулятори з відповідним алгоритмом і законом регулювання. Це дозволяє істотно понизити втрати при функціонуванні об'єкту (витрата енергії, втрати продукції і ін.).
4.4.1 П-закон регулювання
Керуючись таблицею 4.1 можна стверджувати, що найбільшу швидкодію забезпечує П-закон управління, - виходячи із співвідношення tр / Тd.
Проте, якщо коефіцієнт підсилення П-регулятора Кр малий (найчастіше це спостерігається в системах із запізнюванням), то такий регулятор не забезпечує високої точності регулювання, оскільки в цьому випадку велика величина статичної помилки.
Якщо Кр ≥ 10, то П-регулятор прийнятний, а якщо якщо Кр < 10, то потрібне введення в закон управління інтегральної складової.
4.4.2 ПІ-закон регулювання
Найбільш поширеним на практиці є ПІ-регулятор, який володіє наступними достоїнствами:
Забезпечує нульову статичну помилку регулювання.
Достатньо простий в налаштуванні, оскільки настроюються тільки два параметри, а саме коефіцієнт посилення Кр і постійна часу інтеграції Ti. У такому регуляторі є можливість оптимізації величини відношення Кр/тi>min, що забезпечує управління з мінімально можливою середньоквадратичною помилкою регулювання.
Мала чутливість до шумів в каналі вимірювання (на відміну від ПІД-регулятора).
4.4.3 ПИД-закон регулювання
Для найбільш відповідальних контурів регулювання можна рекомендувати використання ПІД-регулятора, що забезпечує найбільш високу швидкодію в системі.
Проте слід враховувати, що ця умова виконується тільки при його оптимальних налаштуваннях (настроюються три параметри).
Із збільшенням запізнювання в системі різко зростають негативні фазові зрушення, що знижує ефект дії диференціальної складової регулятора. Тому якість роботи ПІД-регулятора для систем з великим запізнюванням стає порівнянною з якістю роботи ПІ-регулятор.
Окрім цього, наявність шумів в каналі вимірювання в системі з ПІД-регулятором приводить до значних випадкових коливань сигналу регулятора, що управляє, що збільшує дисперсію помилки регулювання і знос виконавчого механізму.
Таким чином, ПІД-регулятор слід вибирати для систем регулювання, з відносно малим рівнем шумів і величиною запізнювання в об'єкті управління. Прикладами таких систем є системи регулювання температури.
ПІД регулятори дозволяють для об'єктів постійною часу об’єкта (інерційністю) Т і з малим транспортним запізнюванням d <0,2T забезпечити хорошу якість регулювання: розбіжність регулювання E < 1% (від заданої точки), достатній малий час виходу на режим і невисоку чутливість до зовнішніх обурень. Іноді (у деяких об’єктах регулювання з істотним транспортним запізнюванням), при ?d>0,2T ПІД регулятор володіє поганою якістю регулювання. В цьому випадку хороші якісні показники забезпечують системи управління з моделлю об'єкту.
Слід мати на увазі, що при неточному завданні коефіцієнтів налаштування ПІД регулятор може мати гірші показники, чим двопозиційний регулятор і навіть перейти в режим автоколивань. Для типових П-, ПІ-, ПІД регуляторів відомі прості аналітичні і табличні методи налаштування (наприклад методики Циглера-никольса).
Питання налаштування П-, ПІ-, ПД-, ПІД-регуляторів розглянуті в розділі 6.
5. НАПРЯМ ДІЇ РЕГУЛЯТОРА, ОБ’ЄКТУ РЕГУЛЮВАННЯ І ВИКОНАВЧОГО МЕХАНІЗМУ
5.1 Основні положення і визначення
5.1.1 Напрям дії об’єкта регулювання:
Об’єкт регулювання може мати пряму або зворотну характеристику. Іншими словами – обьект регулювання може бути прямої (нормального) або зворотної (реверсивного) дії.
Об’єкт управління прямої (нормального) дії:
Збільшення значення вихідного сигналу регулятора (наприклад, аналоговий вихід АТ або спрацьовування ключа БІЛЬШЕ) викликає збільшення (зростання) технологічного параметра. Наприклад, збільшення подачі газу в печі або зростаючий потік пари в теплообмінник викликають зростання температури.
Об’єкт управління зворотної (реверсивного) дії:
Збільшення значення вихідного сигналу регулятора (наприклад, аналоговий вихід АТ або спрацьовування ключа БІЛЬШІ) викликає зменшення технологічного параметра. Наприклад, збільшення подачі рідини, що охолоджує, в холодильник викликають зменшення температури.
5.1.2 Вимірювальні перетворювачі прямої дії:
Збільшення технологічної величини викликає збільшення (зростання) вихідного аналогового сигналу (струму або напруги) вимірювального перетворювача і індикацію технологічного параметра, що згодом збільшується (зростаючу).
5.1.3 Виконавчий механізм (клапан) прямої дії:
Збільшення вихідного аналогового сигналу регулятора або включення виконавчого імпульсу БІЛЬШЕ викликають відкриття регулюючого органу виконавчого механізму. Наприклад, велику подачу газу або більший потік пари. Значення аналогового вихідного сигналу (АТ), що управляє, або значення вихідного аналогового елементу пам'яті імпульсного регулятора в багатьох приладах є параметром, що відображається.
5.1.4 Напрям дії регулятора:
Напрям дії регулятора завжди повинен мати зустрічну характеристику (негативний зворотний зв'язок) об’єкту регулювання (включаючи виконавчий механізм і вимірювальний перетворювач).
Малюнок 5.1 - Напрям характеристики регуляторів
а) характеристика регулятора прямої дії
б) характеристика регулятора зворотної дії.
Регулятор зворотної дії у поєднанні з об’єктом, що має зворотну характеристику, по своїх властивостях аналогічний регулятору прямої дії, який управляє об’єктом з прямою характеристикою.

5.2 Узгодження напряму дії регулятора з об’єктом регулювання
5.2.1 Напрям дії об’єкта і виконавчого механізму відомий
У даному розділі представлена методика вибору напряму дії аналогового (5.2.1.1 - з аналоговим виходом) або імпульсного (5.2.1.2 - з імпульсним виходом) регулятора при відомому напрямі дії об’єкта регулювання і виконавчого механізму.
5.2.1.1 Вибір напряму дії аналогового регулятора залежно від напряму дії об’єкта і виконавчого механізму:
Таблиця 5.1 - Вибір напряму дії аналогового регулятора
Задані наступні напрями дії об’єкта і виконавчого механізму:
|
При натисненні клавіші ^ (більше), при управління вихідним сигналом у ручному режимі:
|
Регулятор:
|
||||
Напрям дії обєкта регулювання
|
Напрям дії виконуючого механізму
|
Напрям дії об’єкта і виконуючого механізму
|
Вихідний аналоговий сигнал (АО)
|
Виконуючий механізм (клапан)
|
Індикуємий і регулюючий параметр
|
Вибрати необхідний напрямок дії (тип) регулятора
|
Пряме
|
Пряме (НЗ)
|
Пряме
|
Росте
|
Відкривається
|
Росте
|
Зворотний
|
Пряме
|
Зворотне (АЛЕ)
|
Зворотне
|
Росте
|
Закривається
|
Падає
|
Прямій
|
Зворотне
|
Пряме (НЗ)
|
Зворотне
|
Росте
|
Відкривається
|
Падає
|
Прямій
|
Зворотне
|
Зворотне (АЛЕ)
|
Пряме
|
Росте
|
Закривається
|
Росте
|
Зворотний
|
Примітки.
Умовні позначення виконавчого механізму: АЛЕ – нормально відкритий виконавчий механізм, НЗ – нормально закритий виконавчий механізм.
У таблиці відсутні режими, які не мають практичного сенсу: наприклад, об’єкт прямої дії, виконавчий механізм прямої дії і регулятор прямої дії у якого при збільшенні вихідного сигналу регульований параметр збільшується.
5.2.1.2 Вибір напряму дії імпульсного (трипозиційного, ПІД-імпульсного) регулятора залежно від напряму дії об’єкта і виконавчого механізму:
Таблиця 5.2 - Вибір напряму дії імпульсного регулятора
Задані наступні напрями дії об’єкта і виконавчого механізму:
|
При натисненні клавіші ^ (більше), при управління вихідним сигналом у ручному режимі:
|
Регулятор:
|
||||
Напрям дії об’єкта регулювання
|
Напрям дії виконуючого механізму
|
Напрям дії об’єкта і виконуючого механізму
|
Вихідний аналоговий сигнал (АО)
|
Виконуючий механізм (клапан)
|
Індикуємий і регулюючий параметр
|
Вибрати необхідний напрямок дії (тип) регулятора
|
Пряме
|
Пряме 1)
|
Пряме
|
Більше
|
Відкривається
|
Росте
|
Зворотний
|
Зворотне
|
Пряме 1)
|
Зворотне
|
Менше
|
Закривається
|
Падає
|
Прямій
|
Зворотне
|
Пряме 1)
|
Зворотне
|
Більше
|
Відкривається
|
Падає
|
Прямій
|
Примітки.
Спрацьовування ключа «Більше» відкриває виконавчий механізм.
Якщо виконавчий механізм підключається в зворотньому режимі (реверсивно), тобто ключ «Більше» закриває виконавчий механізм, тоді необхідно реверсувати зворотний зв'язок по положенню або змінити напрям дії регулятора.
3. У таблиці відсутні режими, які не мають практичного сенсу: наприклад, об’єкт прямої дії, виконавчий механізм прямої дії і регулятор прямої дії у якого при збільшенні вихідного сигналу регульований параметр збільшується.
5.2.2 Напрям дії об’єкта і виконавчого механізму невідомі
У даному розділі представлена методика визначення напряму дії виконавчого механізму (5.2.2.1) і об’єкта управління (5.2.2.2).
5.2.2.1 Визначення напряму дії виконавчого механізму
1. Перевести регулятор (систему регулювання) в ручний режим.
При відключеному технологічному процесі (по можливості) або поблизу його безпечного положення натиснути клавішу ^ (більше) збільшення дії, що управляє, і спостерігати, відкриється або закриється виконавчий механізм. Відкриття виконавчого механізму означає нормальна дія.
Якщо у імпульсних регуляторів спостерігається закриття, необхідно поміняти місцями з'єднання ключів, що управляють, Більше і Менше.
4. Спостереження за виконавчим механізмом здійснюється відповідно до таблиці 5.3: Таблиця 5.3 - Визначення напряму дії виконавчого механізму
Тип об’єкта управління:
|
Результат спостереження за виконавчим механізмом:
|
Об’єкти прямої дії:
|
Збільшення технологічного параметра Х (PV) означає виконавчий механізм прямої дії
|
Об’єкти зворотної дії:
|
Зменшення технологічного параметра Х (PV) означає виконавчий механізм прямої дії
|
У імпульсних регуляторів при правильно підключеному позиційному квитуванні:????????
|
Збільшення вихідного сигналу У (АТ) - означає виконавчий механізм прямої дії
|
5. Спостереження за виконавчим механізмом може проводитися:
перед установкою на технологічний об’єкт
на місці його установки на технологічному устаткуванні під час пуско-налагоджувальних робіт.
5.2.2.2 Визначення напряму дії об’єкта управління
1. Перевести регулятор (систему регулювання) в ручний режим.
При відключеному технологічному процесі (по можливості) або поблизу його безпечного положення натиснути клавішу ^ (більше) збільшення дії, що управляє, і спостерігати на індикації зміряної величини - збільшується або зменшується регульований технологічний параметр.
Визначення напряму дії об’єкта управління за наслідками спостереження за технологічним параметром (при наявному виконавчому механізмі) представлене в таблиці 5.4:
Результат спостереження за технологічним параметром
|
Є в наявності виконавчий механізм:
|
Визначуваний напрям дії обьекта управління
|
Відбувається збільшення технологічного параметра
|
Прямої дії (НЗ)
|
Об’єкт прямої дії
|
Зворотної дії (АЛЕ)
|
Об’єкт зворотної дії
|
|
Відбувається зменшення технологічного параметра
|
Прямої дії (НЗ)
|
Об’єкт зворотної дії
|
Зворотної дії (АЛЕ)
|
Об’єкт прямої дії
|
Таблиця 5.4 - Визначення напряму дії об’єкта управління
5.3 Вибір напряму дії регулятора
5.3.1 Визначити напрям дії виконавчого механізму згідно методики 5.2.2.1 и направлення дії об’єкта регулювання згідно методики 5.2.2.2.
Використовуючи дані, отримані в 5.3.1 визначити напрям дії регулятора відповідно до таблиць 5.1 або 5.2, залежно від вихідної структури (аналоговий або імпульсний) існуючого типу регулятора.
У сучасних промислових регуляторах є параметр конфігурації званий "Напрям дії регулятора", який може набувати значення: "Прямий" або "Зворотний".
За допомогою даного параметра може інвертуватися величина приросту сигналу управління. Вибір значення цього параметра здійснюється так, щоб забезпечити негативний зворотний зв'язок в системі управління.
6 МЕТОДИ НАЛАШТУВАННЯ РЕГУЛЯТОРІВ
6.1 Визначення оптимальних налаштувань регуляторів
Регулятор, включений в САР, може мати декілька налаштувань, кожна з яких може змінюватися в достатньо широких межах. При цьому при певних значеннях налаштувань система управлятиме об'єктом відповідно до технологічних вимог, при інших може привести до нестійкого стану.
Тому коштує завдання визначити налаштування, відповідні стійкій системі, але і вибрати з них оптимальні.
Оптимальними налаштуваннями регулятора називаються налаштування, які відповідають мінімуму (або максимуму) якого-небудь показника якості. Вимоги до показників якості встановлюються безпосередньо, виходячи з технологічних. Найчастіше накладаються вимоги на час регулювання tP (або мінімальний час регулювання tPMIN) і ступінь загасання (? ? ?зад).
Проте, змінюючи налаштування так, щоб збільшити ступінь загасання, ми можемо прийти до дуже великого часу регулювання, що недоцільно. І навпаки, прагнучи зменшити час регулювання, ми отримуємо більш коливальні процеси з великим значенням ?.
Залежність ступеня загасання ? від часу регулювання tp в загальному випадку має вигляд, зображений на малюнку 6.1.

Малюнок 6.1 - Залежність ступеня загасання ? від часу регулювання tp
Для визначення оптимальних налаштувань розроблений ряд математичних методів, серед яких метод D-разбиения.
Кривою D-разбиения називається крива в плоскості налаштувань регулятора, яка відповідає певному значенню якого-небудь показника якості.
6.2 Установка параметрів регулювання без знання характеристик об’єкта
Параметри регулювання для оптимального регулювання устаткування в цьому випадку ще невідомі. Для утримання регулюючого контура в стабільному стані є наступні установки:
Коефіцієнт пропорційності Кр = 0,1
Час інтеграції Tи = 0 сек (відключено)
Час диференціювання Tд = 0 (відключено).
П - регулятор (сигнал управління Р = high)
Встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль.
Необхідна для розузгодження регулювання нуль робоча крапка в ручному режимі при Yo = AUto
встановлюється автоматично ( установка ). Робоча крапка може бути також задана уручну, для чого
необхідно встановити параметр «-» Yo на бажану робочу крапку.
Перемкнутися на автоматичний режим.
Поволі збільшувати Кр поки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань.
Трохи зменшувати Кр поки коливання не будуть усунені.
ПД - регулятор (сигнал управління Р = high)
Встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль.
Необхідна для розузгодження регулювання нуль робоча крапка в ручному режимі при Yo = AUto
встановлюється автоматично ( установка ). Робоча крапка може бути також задана уручну, для чого
необхідно встановити параметр «-» Yo на бажану робочу крапку.
Перемкнутися на автоматичний режим.
Поволі збільшувати Кр поки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань.
Перемкнути Tv з oFF на 1 сек.
Збільшувати Tv до тих пір, поки коливання не будуть усунені.
Поволі збільшувати Кр до тих пір, поки знову не з'являться коливання.
Повторювати установки відповідно до двох попередніх кроків до тих пір, поки коливання вже не можуть бути усунені.
Трохи зменшувати Tv і Кр поки коливання не будуть усунені.
ПІ - регулятор (сигнал управління Р = Low)
Встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль.
Перемкнутися на автоматичний режим.
Поволі збільшувати Кр поки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань.
Трохи зменшувати Кр поки коливання не будуть усунені.
Зменшувати Tn до тих пір, поки регулюючий контур знову не почне хилитися до коливань
Поволі збільшувати Tn до тих поки ухил до коливань не буде усунений
ПІД - регулятор (сигнал управління Р = Low)
Встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль.
Перемкнутися на автоматичний режим.
Поволі збільшувати Кр поки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань.
Перемкнути Tv з oFF на 1 сек.
Збільшувати Tv до тих пір, поки коливання не будуть усунені.
Поволі збільшувати Кр до тих пір, поки знову не з'являться коливання.
Повторювати установки відповідно до двох попередніх кроків до тих пір, поки коливання вже не можуть бути усунені.
Трохи зменшувати Tv і Кр поки коливання не припиняться.
Зменшувати Tn до тих пір, поки регулюючий контур знову не почне хилитися до коливань
Поволі збільшувати Tn до тих поки ухил до коливань не буде усунений
6.3 Ручна установка параметрів регулювання по перехідній функції
Якщо дана перехідна функція об’єкта регулювання або вона може бути визначена, то параметри регулювання можуть бути встановлені згідно настановним директивам, вказаним в довідниках. Перехідна функція в положенні регулятора «режим» може бути записана через стрибкоподібну зміну дії, що управляє, і характер регульованої величини може реєструватися самописцем. При цьому виходить перехідна функція, приблизно відповідна вказаною на мал. 2.5. Хороші середні величини з настановних параметрів багатьох укладачів дають наступні емпіричні формули:
П - регулятор:
Пропорційний коефіцієнт Kp = T / [τd * K]
ПІ - регулятор:
Пропорційний коефіцієнт Kp = 0,8 * (Tg / [Tu * K])
Час ізодрома Tn = 3 * Tu
ПІД -:
Пропорційний коефіцієнт Kp = 1,2 * (Tg / [Tu * K])
Час ізодрома Tn = Tu
Час передування Tv = 0,4 * Tu
Де:
Tu - час затримки
Tg - час вирівнювання
Ks - передаточний коефіцієнт об’єкта регулювання
Найпростіший спосіб налаштування ПІД-регуляторів:
I=D=0, збільшуємо P до Pкр, поки в системі не почнуться автоколивання.
P=Pкр/2, D=0, збільшуємо I до Iкр, поки в системі не почнуться автоколивання.
P=Pкр/2, I=Iкр/2, збільшуємо D до Dкр, поки в системі не почнуться автоколивання.
P=Pкр/2, I=Iкр/2, D = Dкр/2. Готово.
7 РЕКОМЕНДАЦІЇ ПО ПРОЕКТУВАННЮ І НАЛАШТУВАННЮ СИСТЕМ РЕГУЛЮВАННЯ
Визначити статичні і дин. х-ки
Опред парам перех х-ки
Вибрати з-н рег 2-3-П-ПІ-ПІД
Ісп мет настр опред парам ПІД рег-ра
7.1 Вибір параметра і каналу регулювання
Одним і тим же вихідним параметром об'єкту можна управляти по різних вхідних каналах. Наприклад, температуру в печі можна регулювати двома шляхами - зміною витрати повітря або газу.
Завдання полягає в тому, яким з вхідних параметрів (каналів) слід вибирати. При виборі потрібного каналу управління виходять з наступних міркувань:
1). Зі всіх можливих регулюючих дій вибирають такий потік речовини або енергії, що подається в об'єкт або відводиться з нього, мінімальна зміна якого викликає максимальна зміна регульованої величини, тобто коефіцієнт посилення по вибраному каналу має бути по можливості максимальним. Тоді, по даному каналу, можна забезпечити більш точне регулювання.
2). Діапазон допустимої зміни сигналу, що управляє, має бути достатній для повної компенсації максимально можливих обурень, що виникають в даному технологічному процесі, тобто має бути запас по потужності управління в даному каналі.
3). Вибраний канал повинен мати сприятливі динамічні властивості, тобто запізнювання ?d і відношення ?d /Т, де Т - постійна часу об'єкту, мають бути можливо меншими. Крім того, зміна статичних і динамічних параметрів об'єкту по вибраному каналу при зміні навантаження або в часі мають бути незначними.
4). Вибраний канал регулювання має бути узгоджений з технологічним регламентом ведення процесу.
7.2 Вибір періоду квантування
Для того, щоб ефект квантування за часом мало позначався на динаміку системи цифрового регулювання, рекомендується вибирати період квантування із співвідношення:
де: - це час досягнення вихідним сигналом рівня 95% від сталого значення при подачі на вхід об'єкту ступінчастого сигналу. Якщо об'єкт першого порядку, то .
Інший підхід до вибору величини періоду квантування заснований на рекомендаціях американських учених Зіглера і Никольса, згідно яким , де - період критичних коливань об'єкту управління.
У реальних умовах при управлінні інерційними процесами значення береться від 1 секунди до декількох хвилин (у газоаналізаторах, наприклад, 1 раз на годину). При регулюванні малоінерційних процесів (наприклад, витрати рідини) величина може складати десяті долі секунди. Не можна вибирати великі періоди опиту, особливо для відповідальних процесів, оскільки в цьому випадку аварійні ситуації ліквідовуватимуться дуже поволі. У теж час, при дуже малому періоді опиту підвищуються вимоги до швидкодії ЕОМ і збільшується вплив шумів.
7.3 Регулювання за наявності шумів
Наявність високочастотних шумових складових у вимірювальному сигналі приводить до випадкових коливань виконавчого механізму системи, що, у свою чергу, збільшує дисперсію помилки регулювання, знижує точність регулювання. В деяких випадках сильні шумові складові можуть привести систему до нестійкого режиму роботи (стохастична нестійкість).
У промислових системах у вимірювальних ланцюгах часто присутні шуми, пов'язані з частотою живлячої мережі (мережеві наведення). У зв'язку з цим важливим завданням є правильна фільтрація вимірювального сигналу, а також вибір потрібного алгоритму і параметрів роботи регулятора.
Для фільтрації сигналів використовуються фільтри низької частоти високого порядку (5 - 7-й порядки), що мають велику крутизну спаду. Такі ФНЧ іноді вбудовуються в нормуючі перетворювачі. Окрім цього, для придушення мережевих наведень (50 Гц в Росії, 60 Гц в США) використовують т.з. фільтр-пробку або фільтр, що загороджує. Слід враховувати, що фільтр, що загороджує, рекомендується застосовують тільки для швидкодіючих систем, тобто систем, смуга пропускання яких більше 50 Гц.
Таким чином, головним завданням регулятора є компенсація низькочастотних обурень. При цьому, з метою отримання мінімальної дисперсії помилки регулювання, високочастотні перешкоди мають бути відфільтровані.
Проте, в загальному випадку, це завдання суперечливе, оскільки спектри обурення і шуму можуть накладатися один на одного. Це протиріччя вирішується за допомогою теорії оптимального стохастичного управління, яка дозволяє добитися хорошої швидкодії в системі при мінімально можливій дисперсії помилки регулювання.
Для зменшення впливу перешкод в практичних ситуаціях застосовуються два способи, заснованих на:
зменшенні коефіцієнта посилення регулятора, тобто, фактично, перехід на інтегральний закон регулювання, який малочутливий до шумів;
фільтрації вимірюваного сигналу.
Так, наприклад, в пневматичній системі "СТАРТ" існує спеціальний прилад ПФ 3.1 (прилад функціональний), званий блоком зворотного передування, який, фактично є фільтром низької частоти, що настроюється. Постійна часу приладу ПФ 3.1 змінюється в діапазоні від 3 секунд до 10 хвилин. Передавальна функція такого фільтру має вигляд:
Постійна часу настроюється залежно від спектру перешкод. За даними однієї з работ, применение блоку зворотного передування дозволило збільшити у 6 разів при збереженні колишньої
дисперсії помилки регулювання і збереженні стійкій роботі системи.
У загальному випадку, для багатовимірних систем, завдання оптимальної фільтрації вирішується за допомогою фільтру Кальмана. Цей фільтр, разом з отриманням оцінок вектора стану об'єкту, забезпечує мінімальну дисперсію всіх його компонентів. Проте, для розрахунку параметрів фільтру, необхідне знання статистичних характеристик шумів, що в реальних умовах утруднене. Не дивлячись на це, в сучасних бортових системах управління використовуються спеціальні вимірники статистичних характеристик перешкод, що дозволяє використовувати і безперервно уточнювати параметри фільтру Кальмана.
У загальному випадку, з метою зниження рівня перешкод, необхідно також правильно вибирати місця установки датчиків і застосовувати екранування вимірювальних ліній.
7.4 Способи збільшення точності регулювання двопозиційних регуляторів
Як указувалося в розділах 3.1-3.3 - процес позиційного (релейного) регулювання є коливаннями навколо заданої точки (див. мал. 3.4, 3.13, 3.17). Частота і амплітуда визначаються величинами часу транспортного запізнювання ?d, максимальній швидкості R зміни параметра, постійною часу обьекта Т, зони нечутливості DB.
Для поліпшення процесу позиційного регулювання, тобто для зменшення відхилень регульованого параметра PV від заданої точки SP необхідно зменшувати транспортне запізнювання ?d і інерційність Т системи регулювання. Це можна зробити, змінивши конструкцію об'єкту регулювання або відповідним чином розмістивши датчик, наприклад, поблизу нагрівача.
За інших рівних умов, чим більше PVmax – максимально можливе значення регульованої величини, тим більше коливання в позиційних регуляторах. Це значення слід встановити по можливості рівним верхній межі діапазону регулювання.
Ці ж міркування також відносяться і до нижньої межі діапазону. Тобто встановивши постійний нагрівач і підключивши підігрівач до регулятора можна істотно поліпшити характеристики САР. Якщо, проте, потрібний широкий діапазон регулювання, можна застосувати чотирьохпозиційний регулятор, підключивши до нього два елементи, один з яких в два рази могутніше за інше.
СПИСОК ЛІТЕРАТУРИ
ДСТУ 3626-97. Базові програмно-технічні комплекси локального рівня для розосереджених автоматизованих систем керування технологічними процесами. Загальні вимоги.
ГОСТ 23222-88. Характеристики точності виконання наказаної функції средств автоматизации. Вимоги до нормування. Загальні методи контролю.
Автоматичні прилади, регулятори і машини, що управляють: Довідник /Под ред. Кошарського б.Д. -Изд. 3-і. -Л.: Машинобудування, 1976. -486 с.
Аязян г.К. Розрахунок автоматичних систем з типовими алгоритмами регулювання: Навчань. пособ. -Уфа.: Вид-во УНІ, 1986. -135 с.
Бесекерський в.А., Попов е.П. Теорія систем автоматичного регулювання. - M.: Наука, 1975.
Голубятников в.А., Шувалов в.В. Автоматизація виробничих процесів в хімічній промисловості: Підручник. -М.: Хімія, 1985. -352 с.
Дадаян л.Г. Автоматизація технологічних процесів: Методичні вказівки до курсового і дипломного проектування. -Уфа.: Вид-во УНІ, 1985. - 225 с.
Кліначев Н. В. Теорія систем автоматичного регулювання і управління: Навчально-методичний комплекс. - Offline версія. - http://vissim.nm.ru/tau_lec.html, - Челябінськ, 2003.
Мазуров в.М. Курс лекцій. Кафедра АТМ. Тульський Державний університет.
Полоцкий л.М., Лапшенков г.І. Автоматизація хімічних виробництв. Навчань. пособ. -М.: Хімія, 1982. - 296 с.
Промислові прилади і засоби автоматизації: Довідник / В.Я.Баранов, Т.Х.Безновськая, В.А.Бек і др.; Під общ. Ред. В.В.Черенкова. Л.: Машинобудування. Ленінгр. Отд-ніє.- 847с., мул.
Ротач в.Я. Автоматизація налаштування систем управління. -М.: Енергоїздат, 1984.
Ротач в.Я. Розрахунок налаштування промислових систем регулювання. -М.: Енергоїздат, 1984.
Рубашкин а.С. Методика наладки систем автоматичного регулювання прямоточних казанів.
Збірка завдань по теорії автоматичного регулювання і управления/ Під редакцією В.А.Бесекерского. - M.: Наука, 1978.
Стефані е.П. Основи побудови АСОВІ ТП: Навчань. пособ. -М.: Енергоїздат, 1982. -352 с.
Стефані е.П. Основи розрахунку налаштування регуляторів. -М.: Енергоїздат, 1982.
Теорія автоматичного управління: Підручник. У 2-х частинах / Під ред. А.А.Воронова. -М.: Висш.шк., 1986. -Ч.1. - 367 с. - Ч.2. -504 с.
Шафрановський в.А. Довідник того, що налагоджує автоматики котельних установок.- Сімферополь: Таврія, 1987.- 176с.
Abdul Aziz Ishak, Muhammed Azlan Hussain. “Reformulation of the Tangent Method for PID Controller Tuning”. Department of Chemical Engineering Faculty of Engineering, Universiti Malaya. 50603 Kuala Lumpur, Malaysia. http://aabi.tripod.com
"Basics of Proportional-Integral-Derivative Control”, Control Engineering, March 1998.
“Comparison of PID Control Algorithms”, ExperTune, Inc., http://www.expertune.com/artCE87.html.
John G. Ziegler and Nathaniel B. Nichols, “Optimum Settings for Automatic Controllers”, Trans. ASME, Nov. 1942, pp. 759-768.
John A. Shaw, “PID Algorithms and Tuning Methods. Process Control Solutions”, Rochester, New York. 585-234-5864, http://www.jashaw.com/pid/tutorial/index.html, 2001.
Thomas B. Kinney, “Tuning Process Controllers”, Process Automation Series, Foxboro-McGraw-Hill, Inc., 1985, pp. 19-24.
Vance VanDoren, “Zieglar-Nichols Methods Facilitate Loop Tuning”, Control Engineering Online, Sept. 1998, http://www.controleng.com.
Лист реєстрації змін
Зміна |
Номери листів |
Всього листів в документі |
№ документу |
Вхідний № документу і дата |
Підпис |
Дата |
||
Зміне них |
Замін ених |
Нових |
||||||
|
|
|
|
|
|
|
|
|
Сторінка для нотаток
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________
________________________________________________________________________________________