

3.1.5.4 Двопозиційне управління і сигналізація з очікуванням події
Двопозиційне регулювання і сигналізація з очікуванням події застосовується у випадках, коли необхідно, наприклад, відключити (включити) включений (вимкнений) вихід, що управляє, для того, щоб здійснити запуск іншого устаткування. Функція очікування деякої події є функцією безумовного відключення (включення) виходу, що управляє.
Умовою очікування події для цього може служити:
зміна заданої точки регулятора
включення дискретного входу регулятора, тобто факт події, що відбулася, від іншого контроллера (регулятора або іншого устаткування) формується дискретним сигналом
із забороною спрацьовування при старті. Наприклад, встановлена логіка роботи вихідного пристрою менше встановленого значення із забороною спрацьовування при старті (включенні живлення). Наприклад, при включенні устаткування вимірювана величина ще не вийшла на режим і менше встановленого значення - це може спричинити включення вихідного пристрою. Але при даній логіці роботи вихідний пристрій не включиться, оскільки вимірювана величина вперше вийшла за встановлені межі. Вихідний пристрій включиться тоді, коли вимірювана величина вийде з цих меж, і потім знову увійде до встановлених меж.
У сучасних мікропроцесорних регуляторах вибір типу умови очікування події і логіка роботи вихідних пристроїв (представлені на мал. 3.5(а-г) в розділі 3.1.5.1) є програмованими параметрами.
Як приклад на ріс.3.7 приведений процес двопозиційного управління з очікуванням події і з логікою роботи в зоні встановлених значень MIN і MAX.

Малюнок 3.7 - Процес двопозиційного управління з очікуванням події
Примітка до малюнка 3.7. «1» - з очікуванням події, «2» - без очікування події. Логіка роботи вихідного пристрою (Don) - поза зоною установок MIN-MAX.
3.1.5.5 Двопозиційне імпульсне управління
Двопозиційний імпульсний регулятор застосовується для управління електродвигунами, насосами і іншим устаткуванням. Даний тип управління використовується в схемах, де елементом, що управляє, є реле (контактор, пускач) з самоблокуванням, тобто з установкою на "самопідхват" – див. рис 3.8.
Якщо з схеми управління буде дана команда ПУСК певній тривалості, замкнуться контакти ПУСК, наприклад на 1-2 секунди, включиться реле К1, замкнуться контакти К1 і реле К1, що управляє, залишиться включеним.
Якщо з схеми управління буде дана команда СТОП певній тривалості, розімкнуться контакти СТОП, наприклад 1-2 секунди, вимкнеться реле К1, що управляє, розімкнуться контакти К1 і схема повернеться в колишній стан.
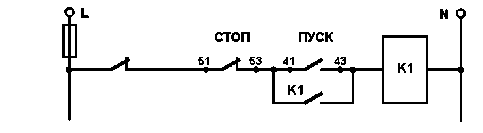
Малюнок 3.8 - Схема управління електродвигуном насоса
Параметрами налаштування двопозиційного імпульсного регулятора є:
логіка роботи вихідного пристрою, яка представлена на мал. 3.5(а-г) в розділі 3.1.5.1, і може бути: менше заданого значення, більше заданого значення, в зоні встановлених значень, поза зоною встановлених значень
тривалість імпульсу, що управляє (наприклад, від 1 до 100 секунд).
Як приклад на рис.3.9 приведений процес двопозиційного імпульсного регулювання з логікою роботи більше заданого значення (MAX) і тривалістю імпульсу, що управляє, 2 секунди.

Малюнок 3.9 - Процес двопозиційного імпульсного регулювання