5 Исследование динамики грузоподъемного механизма
(1-я часть)
Лабораторная работа № 5
Цель работы: Изучить динамику грузоподъемного механизма.
5.1 Основные теоретические положения
При расчете динамических нагрузок в механизмах грузоподъемных машин принимают движение при пуске равноускоренным и при торможении равнозамедленным. Сила инерции поступательно-движущейся массы
![]() ,
(5.1)
,
(5.1)
где G − вес движущейся массы груза или крана, Н; g − ускорение свободного падения, м∙с2; v − скорость поступательного движения, м/мин; t − время неустановившегося движения, с.
Момент сил инерции вращающейся массы
![]() , (5.2)
, (5.2)
где J − момент инерции массы, кг∙м2, Н; ε − угловое ускорение, с−2; GD2 − маховый момент вращающейся массы относительно оси ее вращения, Н∙м2; ni − частота вращения массы, об/мин.
Маховый момент, приведенный к быстроходному валу с частотой вращения n:
− для поступательно движущейся массы
![]() , (5.3)
, (5.3)
− для вращающейся массы
![]() . (5.4)
. (5.4)
где ni − частота вращения массы на тихоходном валу привода, об/мин; n − частота вращения быстроходного вала привода, об/мин; u − передаточное отношение, между тихоходным и быстроходным валом.
Общий маховый момент вращающихся и поступательно движущихся масс механизма (груза − в механизме подъема, тележки − в механизме передвижения тележки, моста − в механизме передвижения крана, вращающихся масс поворотной части крана), приведенный к валу электродвигателя
![]() ,
(5.5)
,
(5.5)
где
![]() − суммарный маховый момент всех
стандартных деталей привода, располагаемых
сразу после вала электродвигателя до
входного вала редуктора (в него могут
входить:
− суммарный маховый момент всех
стандартных деталей привода, располагаемых
сразу после вала электродвигателя до
входного вала редуктора (в него могут
входить:
![]() − маховый момент ротора электродвигателя,
− маховый момент ротора электродвигателя,
![]() − маховый момент муфт, соединяющих валы
электродвигателя и редуктора;
− маховый момент муфт, соединяющих валы
электродвигателя и редуктора;
![]() − маховый момент редуктора,
− маховый момент редуктора,
![]() − маховый момент тормозного шкива и
т.д.), Н∙м2;
− маховый момент тормозного шкива и
т.д.), Н∙м2;
![]() − маховый момент всех частей располагаемых
после выходного вала редуктора,
приведенный к валу электродвигателя
соответствующего механизма подъема,
передвижения или поворота (в него могут
входить маховый момент от груз, тележки,
моста, поворотной или другой вращающейся
части крана, Н∙м2);
δ
− коэффициент, учитывающий инерцию
вращающихся масс деталей трансмиссии
механизма (валов, зубчатых колес,
барабана, ходовых колес, подшипников и
т.д.), расположенных после вала
электродвигателя и неучтенных расчетом
(рекомендуется принимать в пределах
1,1...1,25).
− маховый момент всех частей располагаемых
после выходного вала редуктора,
приведенный к валу электродвигателя
соответствующего механизма подъема,
передвижения или поворота (в него могут
входить маховый момент от груз, тележки,
моста, поворотной или другой вращающейся
части крана, Н∙м2);
δ
− коэффициент, учитывающий инерцию
вращающихся масс деталей трансмиссии
механизма (валов, зубчатых колес,
барабана, ходовых колес, подшипников и
т.д.), расположенных после вала
электродвигателя и неучтенных расчетом
(рекомендуется принимать в пределах
1,1...1,25).
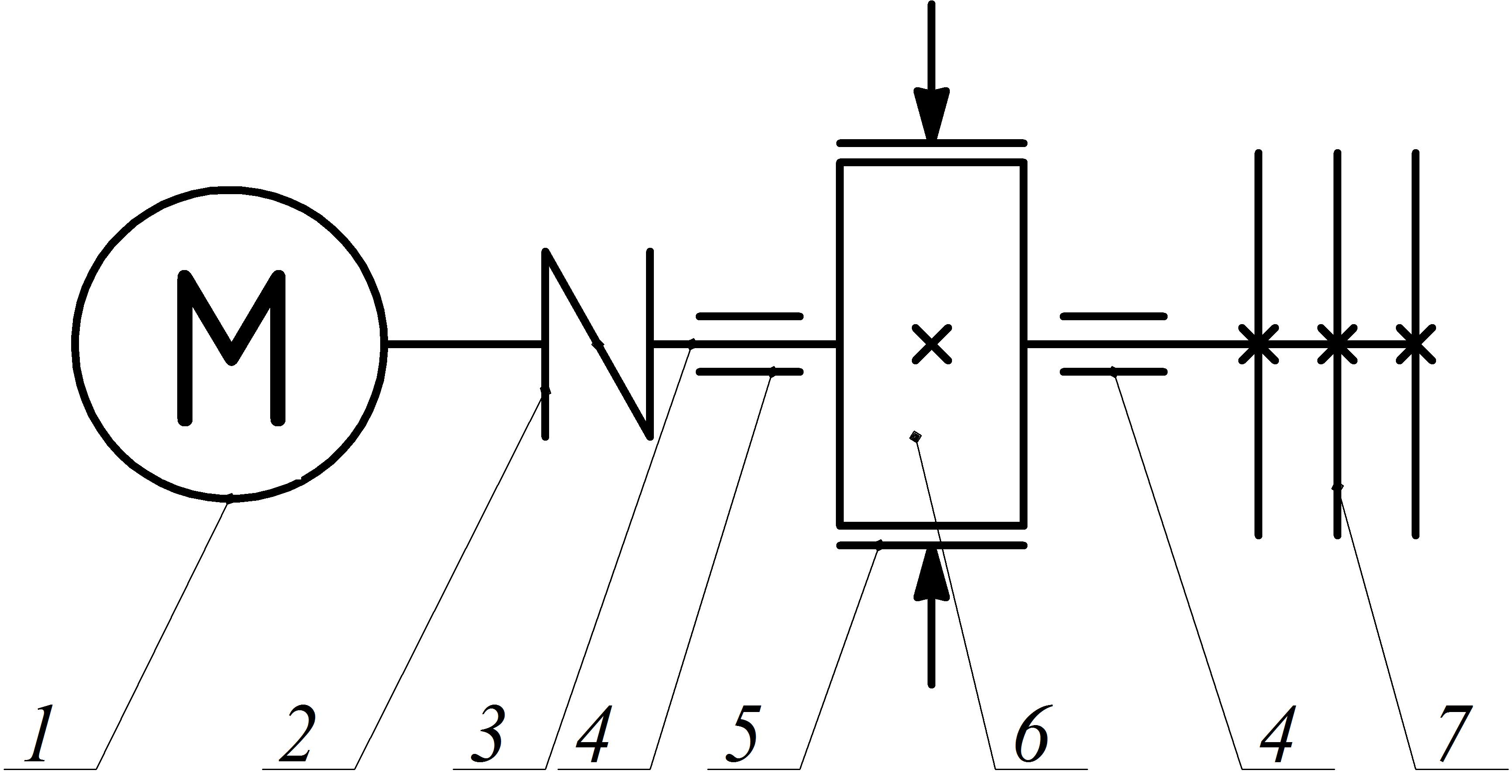
5.2 Установка для исследования динамики грузоподъемного механизма
Установка для исследования динамики механизма (рисунок 5.1) состоит из электродвигателя 1, вал которого соединен упругой муфтой 2 с валом 3, опирающимся на подшипники 4 и несущим тормозной шкив 6 и инерционные диски 7. На тормозном шкиве 6 установлен нормально-замкнутый стопорный короткоходовой двухколодочный тормоз 5 автоматического действия с пружинным замыканием. Необходимые для исследования динамики механизма данные электродвигателя, тормоза и инерционных дисков приведены в технической характеристике установки (таблица 5.1).