

11.2. Теодолитная съемка
Теодолитной съемкой называют горизонтальную съемку, выполняемую с помощью теодолита и мерных приборов (ленты, рулетки) или дальномера.
Теодолитную съемку выполняют для составления крупномасштабных планов населенных пунктов, внутризаводских территорий, железнодорожных станций, подъездных путей промышленных предприятий.
Съемочной основой теодолитной съемки служат, как правило, теодолитные ходы (замкнутые и разомкнутые). Сгущение съемочной сети может быть выполнено определением координат дополнительных точек засечками полярной, линейной, угловой.
Съемку ситуации выполняют путем измерений, связывающих положение характерных контурных точек объектов с пунктами съемочной основы. Наиболее распространены следующие способы съемки.
Способ прямоугольных координат применяют при съемке объектов с четкими контурами. Так, при съемке здания (см. рис. 11.2, а) из характерной точки его контура на сторону теодолитного хода опускают перпендикуляр и измеряют расстояние по стороне хода до основания перпендикуляра (координата x) и длину перпендикуляра (координата y). Расстояния измеряют рулеткой или лентой. Для контроля выполняют обмер здания.
При построении перпендикуляров длиною более 8 м пользуются экером. Экер (рис. 11.1 а) имеет два зеркала 3 и 4, расположенные под углом = 45°. Луч, падающий на одно из зеркал, после двойного отражения выходит под прямым углом к исходному направлению. Действительно (см. рис. 11.1 б), = 180 ( + ) = 180 [(180 2) + (180 2)] = 180 360 + 2( ) = 180 2[180 ( )] = 180 2. Следовательно, при = 45° имеем = 90.
Экер позволяет находить на стороне теодолитного хода 1 – 2 (рис. 11.2 а) точку, в которой линия хода и направление на съемочный пикет (угол здания) взаимно перпендикулярны. В этой точке в окне экера 2 (рис. 11.1 а) видна веха, установленная на пункте теодолитного хода, а под нею в зеркале – изображение угла здания.

Рис. 11.1. Двухзеркальный экер: а – вид прибора: 1, 2 – окна; 3, 4 – зеркала; б – ход лучей: 2 – пункт съемочной сети; Q – направление перпендикуляра
Способ угловой засечки применяют при съемке удаленных или недоступных объектов. Так, для определения положения центра водонапорной башни (см. рис. 11.2, б) на пунктах съемочной сети 1 и 2 теодолитом измеряют горизонтальные углы 1 и 2. Наилучший угол для засечки 90. Практически угол должен быть в пределах от 30 до 150.
Способ линейной засечки (рис. 11.2, в). Положение точки M определяют, измеряя расстояния d2, d4 до точек, положение которых известно. Способ удобен, когда расстояния не превышают длины применяемого мерного прибора.
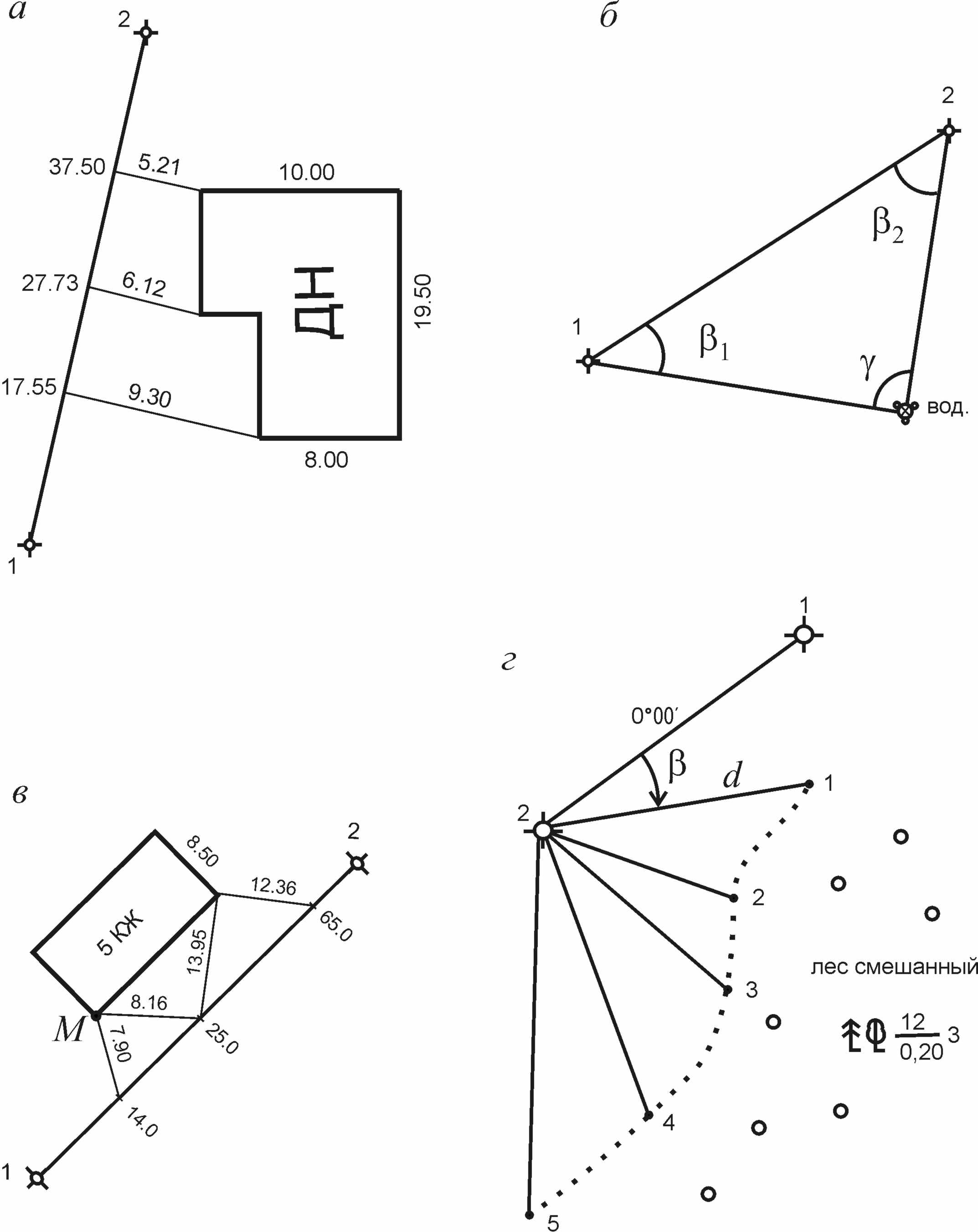
Рис. 11.2. Способы съемки ситуации: а – прямоугольных координат; б – угловой засечки; в – линейной засечки; г – полярных координат
Способ полярных координат (рис. 11.2, г) – для определения положения точки 1 измеряют горизонтальный угол и расстояние d.
Результаты выполненных в ходе съемки измерений записывают в полевой журнал. Одновременно составляют абрис – схематический чертеж, на котором в произвольном масштабе показывают расположение пунктов съемочной сети и снимаемых объектов, характеристики снимаемых объектов и результаты измерений.
Составление плана выполняют в следующем порядке.
Вычисляют координаты пунктов съемочной основы (вершин теодолитных ходов и точек, полученных засечками).
Разбивают на планшете сетку прямоугольных координат и оцифровывают ее.
Наносят на план пункты съемочной сети.
Наносят на план съемочные пикеты и вычерчивают контуры.
Оформляют план в соответствии с руководством “Условные знаки”.