Тема 4.3 Синхронізація в цсп
Тактовая синхронизация. Выделение тактовой частоты
Принципы построения систем тактовой синхронизации. Устройства тактовой синхронизации УТС обеспечивают синхронную работу ГО приемной и передающей частей ЦСП. Только в этом случае ГО приемной части будет вырабатывать управляющие сигналы, совпадающие по частоте и времени с импульсными последовательностями, поступающими в приемное оборудование ЦСП из линейного тракта, обеспечивая тем самым правильное распределение принимаемых импульсов по канальным интервалам и циклам и соответственно правильное декодирование кодовых комбинаций. Следовательно, основная задача УТС — исключить расхождение частот ГО передачи и приема или, в крайнем случае, обеспечить небольшую величину этого расхождения. Как известно, в аналоговых системах передачи для этих целей применяют, в основном, технические решения, обеспечивающие стабилизацию частоты задающих генераторов приемного и передающего оборудования (например, кварцевую стабилизацию). Рассмотрим, достаточно ли применения принципа стабилизации частоты ЗГ для цифровых систем передачи.
Предположим, что
частота ЗГ первичной ЦСП fзг
= fт
= = 2,048 МГц. Определим максимально
допустимую относительную нестабильность
частоты ЗГ: k =
![]() fзгmax/fзг
н, где fзг
н —
номинальное значение fзг
, а
fзгmах—максимальное
отклонение частоты ЗГ от номинального
значения. Очевидно, что в предельном
случае управляющий распределительный
импульс может не совпадать по
временному положению с регистрируемым
на величину, равную длительности
одного символа, т, е. половину тактового
интервала Т/2 (в этом случае говорят о
несинхронное передающего и приемного
оборудования по символам). В наихудшем
случае при отклонении частот ЗГ в разные
стороны от fзп
н на величину
fзп
mах взаимное
положение регистрируемого и управляющего
импульсов должно отличаться на
t<T/2=
l/(2fTН).
При этом период fт
не должен изменяться больше чем на Т/4.
fзгmax/fзг
н, где fзг
н —
номинальное значение fзг
, а
fзгmах—максимальное
отклонение частоты ЗГ от номинального
значения. Очевидно, что в предельном
случае управляющий распределительный
импульс может не совпадать по
временному положению с регистрируемым
на величину, равную длительности
одного символа, т, е. половину тактового
интервала Т/2 (в этом случае говорят о
несинхронное передающего и приемного
оборудования по символам). В наихудшем
случае при отклонении частот ЗГ в разные
стороны от fзп
н на величину
fзп
mах взаимное
положение регистрируемого и управляющего
импульсов должно отличаться на
t<T/2=
l/(2fTН).
При этом период fт
не должен изменяться больше чем на Т/4.
Предположим, что в момент включения системы частоты ЗГ передающей и приемных частей первичной ЦСП одинаковы и в дальнейшем расходятся. Определим, за какой промежуток времени tпс при относительной нестабильности k частот ЗГ будет достигнуто положение не синхронности по символам. Так как
tпс = T/(4k) = 1/(4fтk), то, следовательно, k= l/(4fTtпc) 1/(8*10-6fпc). Если принять, что система будет выходить из состояния синхронизма каждый час (а это будет очень плохая система, так как выход из состояния синхронизма по символам приводит к прекращению связи), то требуемая в этом случае относительная нестабильность частоты ЗГ составит k= 1/(8*106• 3,6• 103) 3,7*10-11, что недостижимо по техническим и экономическим соображениям.
Вывод, следующий из вышеприведенных расчетов: реализация современных ЦСП без устройств тактовой синхронизации (фазирования по посылкам) невозможна.
В ЦСП к устройствам тактовой синхронизации предъявляются следующие требования:
высокая точность подстройки частоты и фазы управляющего сигнала ЗГ приемной части; малое время вхождения в синхронизм; сохранение состояния синхронизма при кратковременных перерывах связи.
Различают две группы УТС, отличающиеся методом использования синхросигналов. К первой группе относятся устройства с синхронизацией по специальному синхросигналу. Этот метод усложняет построение линейного тракта ЦСП и генераторного оборудования, к тому же точность установки фазы управляющих сигналов в большой степени связана с нелинейными искажениями и неравномерностью частотных характеристик линейного тракта. Ко второй группе относятся методы подстройки фазы управляющих импульсов под основной принимаемый сигнал. Такую подстройку можно осуществить либо по специальным синхроимпульсам, либо по рабочим импульсам (элементам кодовых комбинаций цикла). Применение специальных синхроимпульсов снижает пропускную способность системы, поэтому на практике нашел применение метод тактовой синхронизации по рабочим импульсам. Эту группу УТС можно разделить на две подгруппы, отличающиеся способом выделения тактовой частоты.

Основное применение в ЦСП с невысокой скоростью передачи нашли УТС с резонансной системой для выделения тактовой частоты. Достоинства таких систем — простота реализации и, как следствие, улучшение экономических показателей системы, являются определяющими при реализации ЦСП местных и зоновых сетей. Недостатки УТС такого типа: быстрое пропадание тактовой частоты при перерывах связи или при появлении в принимаемом сигнале длинных серий пробелов (нулей); зависимость стабильности выделенной тактовой частоты (а следовательно, и точности фазирования) от длины серии нулей (характера кодовых комбинаций) и стабильности параметров фильтра, выделителя тактовой частоты, а также от скорости передачи.
Более сложным является метод синхронизации с применением устройств автоподстройки частоты генераторов тактовой частоты приемного оборудования, лишенный недостатков первого метода. Иногда эти два метода называют соответственно методами пассивной и активной фильтрации частоты. Устройства тактовой синхронизации с активной фильтрацией получают все большее распространение в ЦСП в связи с их достоинствами и упрощением вопросов реализации на основе более совершенной элементной базы, обеспечиваемой развитием микроэлектроники.
Сущность метода пассивной фильтрации тактовой частоты состоит в том, что из входного цифрового сигнала с помощью полосовых фильтров, резонансных контуров или избирательных усилителей выделяется тактовая частота. Часть УТС, обеспечивающая выполнение этих функций, называется выделителем тактовой частоты. Структурная схема этого устройства приведена на рис. 3.23, а, а структура всего УТС — на рис. 3.23, б.
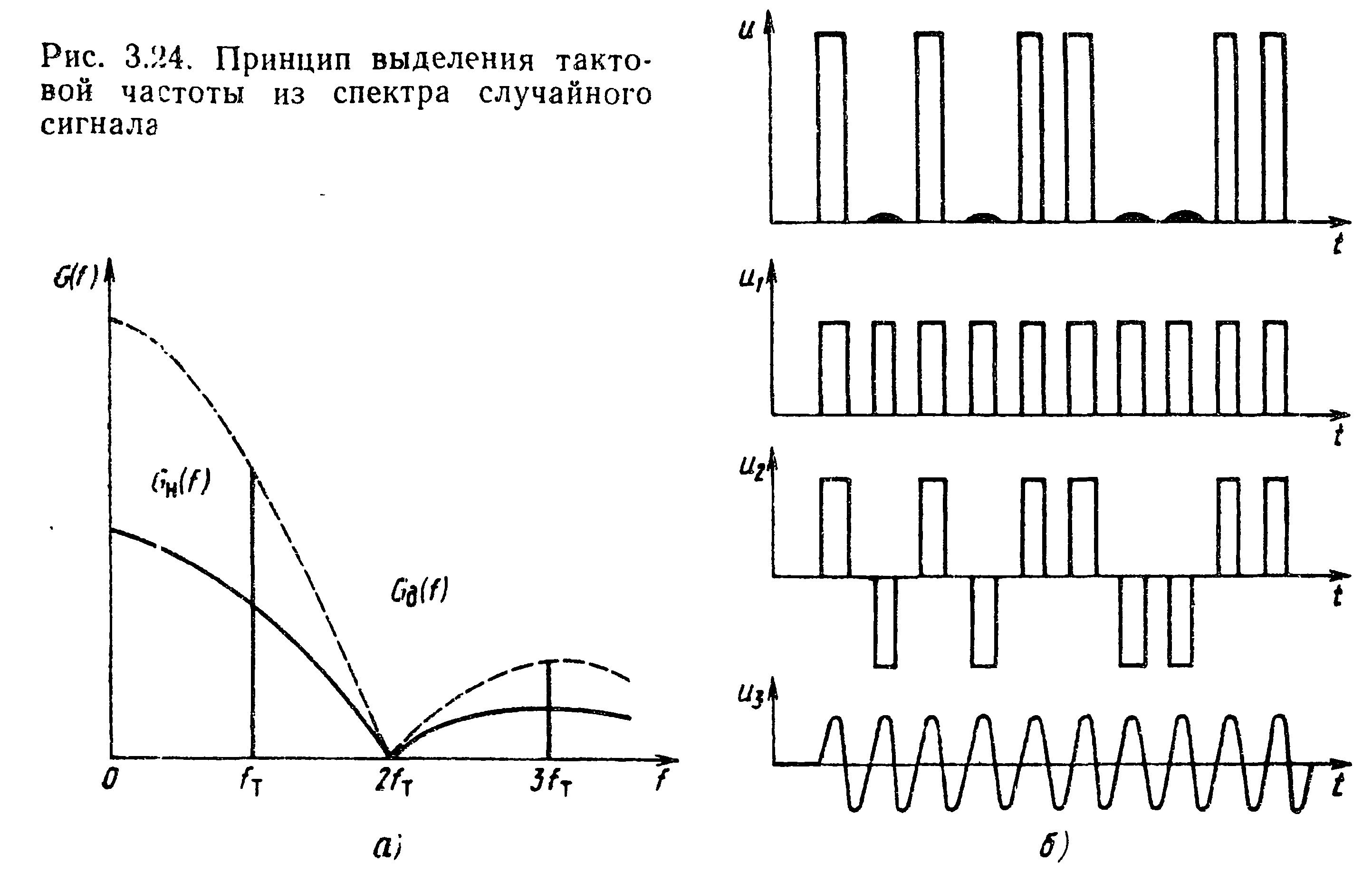
Рассмотрим сущность резонансного метода. Известно, что энергетический спектр случайной последовательности импульсов со скважностью q>1 содержит как непрерывную Gн(f), так и дискретную <Gд(f) составляющую (рис. 3.24, а). Дискретная часть энергетического спектра представляет собой сумму гармоник, кратных тактовой частоте (частоте следования импульсов). Этот вывод можно сделать, не применяя сложных математических выкладок, если представить случайный двоичный сигнал и в виде суммы регулярной однополярной последовательности импульсов и случайной двухполярной последовательности импульсов.
Как известно, регулярная последовательность импульсов с тактовой частотой fт имеет дискретный (линейчатый) спектр GД(f), в составе которого в качестве первой гармоники выступает составляющая с частотой, равной тактовой. Попутно отметим, что случайная двухполярная последовательность импульсов, как видно из рисунка, не может быть в свою очередь получена как сумма случайной и регулярной составляющих и, следовательно, спектр такой последовательности не содержит дискретных составляющих. Очевидно, что превращение двухполярной последовательности в однополярную (например, применением выпрямительных устройств) позволяет восстановить дискретную часть спектра. Следует обратить внимание на то, что если линейный сигнал представляет собой случайную последовательность импульсов с частотой fт и
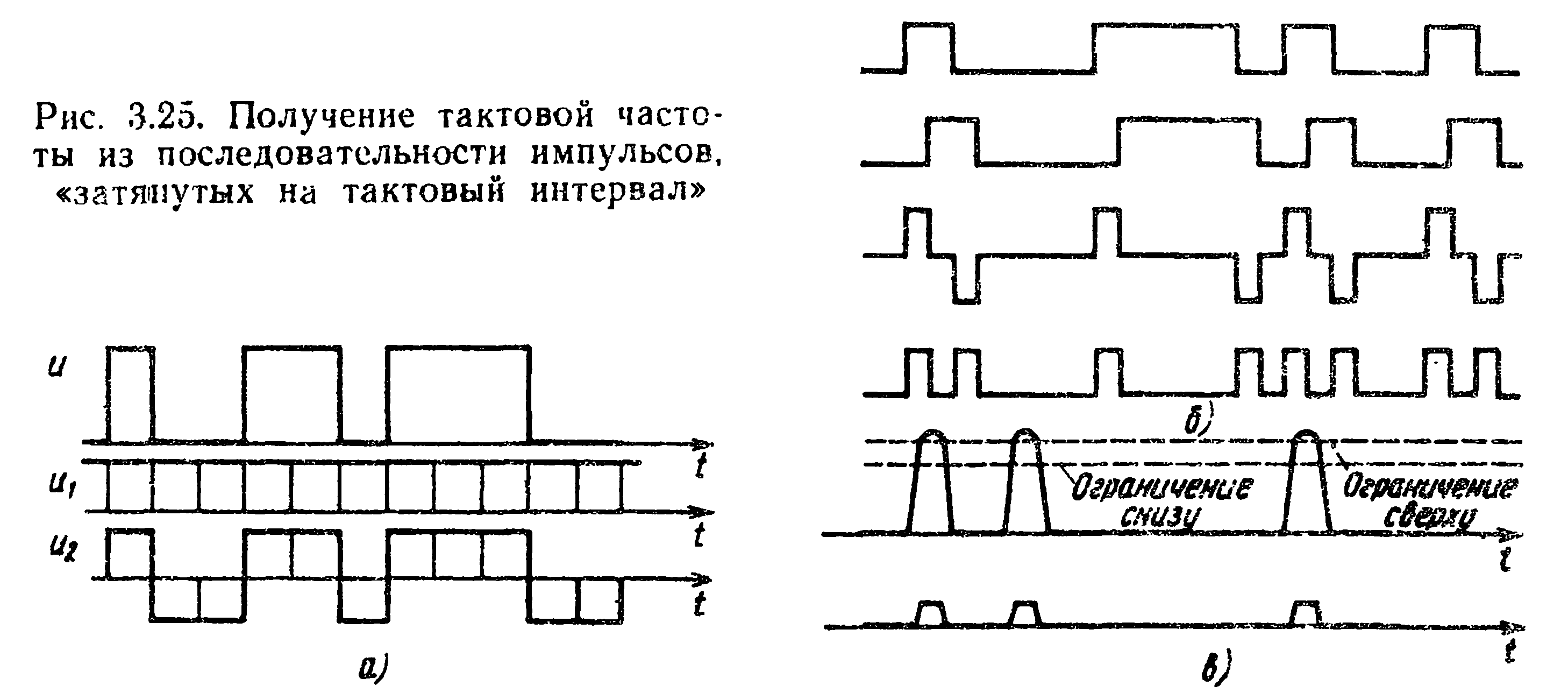
q= 1, то энергетический спектр такого сигнала вообще не содержит дискретной части спектра. Сказанное можно проследить по рис. 3.25, а, на котором показано, что, если q>1, то регулярная последовательность импульсов «сливается» в постоянную составляющую.