

Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Кузбасский государственный технический университет имени Т.Ф. Горбачева»
Кафедра Электропривода и автоматизации
А.В. Григорьев
Изучение схем управления электроприводами экскаваторов по системе г-д с тиристорным управлением
Рекомендовано для использования в учебном процессе
по курсу «Автоматизированный электропривод типовых
Производственных механизмов и технологических комплексов»
учебно-методической комиссией специальности 140604 «Электропривод
И автоматика промышленных установок и технологических комплексов»
Кемерово 2012
Рецензия
Рецензенты:
Семыкина И.Ю., доцент кафедры электропривода и автоматизации
Завьялов В.М., председатель УМК специальности 140604 «Электропривод и автоматика
промышленных установок и технологических комплексов»
Григорьев Александр Васильевич. Изучение схем управления электроприводами экскаваторов по системе Г-Д с тиристорным управлением: метод указания для лабораторных работ по дисциплине «Теория электропривода» [Электронный ресурс]: для студентов специальности 140604 «Электропривод и автоматика промышленных установок и технологических комплексов» / А.В. Григорьев - Электрон. дан. - Кемерово: КузГТУ, 2011. - 1 электрон. опт. диск (CD-ROM); зв.; цв.; 12 см. - систем. требования: процессор Intel или AMD 500 МГц, ОЗУ 128 Мб; (CD-ROM - дисковод); мышь. - Загл. с экрана.
В данных методических указаниях приводятся типовые структуры автоматизированных электроприводов экскаваторов, рассматриваются типовые узлы систем управления, а также принципиальные электрические схемы электропривода экскаватора ЭКГ-10 с тиристорным регулированием возбуждения, что позволяет студентам получить навыки выбора, расчета и чтения принципиальных электрических схем электроприводов.
Содержание
Цель работы: изучение особенностей работы, типовых схем и типовых узлов автоматизированных электроприводов экскаваторов.
Задачи работы:
Изучить особенности работы автоматизированных электроприводов (АЭП) экскаваторов.
Изучить основные структурные схемы АЭП экскаваторов.
Изучить основные узлы АЭП экскаваторов.
Освоить методы расчета основных узлов АЭП экскаваторов.
Научиться анализировать принципиальные электрические схемы АЭП экскаваторов.
Научиться выбирать и рассчитывать схемы АЭП карьерных экскаваторов.
1. Особенности работы аэп экскаваторов
Выпускаемые экскаваторы можно разделить на два вида: многоковшовые и одноковшовые. Одноковшовые экскаваторы с АЭП выпускаются с оборудованием драглайна или прямой лопаты. Одноковшовые экскаваторы с гидравлическим приводом выпускаются с оборудованием обратной лопаты (в данном УМК не рассматриваются). Экскаваторы с оборудованием прямой лопаты делятся на вскрышные и карьерные. Вскрышные экскаваторы снабжаются длиной и легкой стрелой с соответствующей рукоятью и предназначены для работы в более мягких грунтах. Карьерные экскаваторы снабжаются короткой и прочной стрелой с рукоятью и предназначены для работы в наиболее тяжелых грунтах. Вскрышные и карьерные экскаваторы снабжаются гусеничным механизмом передвижения и называются гусеничными (ЭКГ – экскаватор карьерный гусеничный, ЭВГ – экскаватор вскрышной гусеничный). Экскаваторы с оборудованием драглайна снабжаются шагающим механизмом передвижения, поэтому называются шагающими (ЭШ - экскаватор шагающий). Шагающие экскаваторы предназначены для работы в мягких грунтах и имеют легкую и длинную стрелу, на которой при помощи канатов подвешивается ковш.
Рабочий цикл экскаватора – лопаты состоит из трех основных операций: черпание, поворот на выгрузку и поворот в забой. В черпании участвуют электроприводы подъема и напора. Электропривод подъема создает основное режущее усилие, а электропривод напора внедряет ковш в грунт и регулирует толщину снимаемой стружки. Электропривод поворота осуществляет вращение поворотной платформы. В процессе поворота экскаватора в забой электроприводом напора производится выдвижение стрелы, а электроприводом подъема – опускание ковша. При повороте на выгрузку рукоять втягивается при помощи электропривода напора и поднимается при помощи электропривода подъема. Разгрузка ковша осуществляется при помощи электропривода открывания днища ковша, который является вспомогательным.
Рабочий цикл экскаватора драглайна состоит из тех же основных операций. В операции черпания участвуют электроприводы тяги и подъема, причем глубина снимаемой стружки регулируется электроприводом подъема, а основное режущее усилие создается электроприводом тяги. В процессе снятия стружки электропривод подъема находится в режиме торможения, а электропривод тяги в двигательном режиме. Затем электропривод подъема переводится в двигательный режим и происходит отрыв ковша от грунта; ковш, натянутый на канатах, перемещается вверх вдоль стрелы. При этом электропривод подъема находится в двигательном режиме, а электропривод тяги - в тормозном. Усилие торможения электропривода тяги должно быть таким, чтобы ковш не опрокинулся и не создал на канате чрезмерных усилий. Разгрузка ковша экскаватора-драглайна осуществляется при помощи резкого отпускания электропривода тяги, в результате которого происходит ослабление тяговых канатов. Вращение поворотной платформы производится при помощи электроприводов поворота.
На экскаваторах средней и большой мощности устанавливаются индивидуальные электроприводы главных механизмов.
Нагрузочные диаграммы главных электроприводов экскаваторов – лопат показаны на рис. 1.1, где t1 – черпание, t2 – поворот на разгрузку, t3 – разгрузка, t4 – поворот в забой.
Во время черпания электроприводы напора и подъема совершают прямые и обратные перемещения. Во время поворота на разгрузку электроприводы подъема и напора используются для выравнивания ковша относительно места разгрузки, а при повороте в забой с помощью них происходит возврат ковша на исходную точку черпания.
Нагрузочные диаграммы главных электроприводов экскаваторов – драглайнов показаны на рис. 1.2, где t1 – черпание, t2 – поворот на разгрузку, t3 – разгрузка, t4 – поворот в забой.
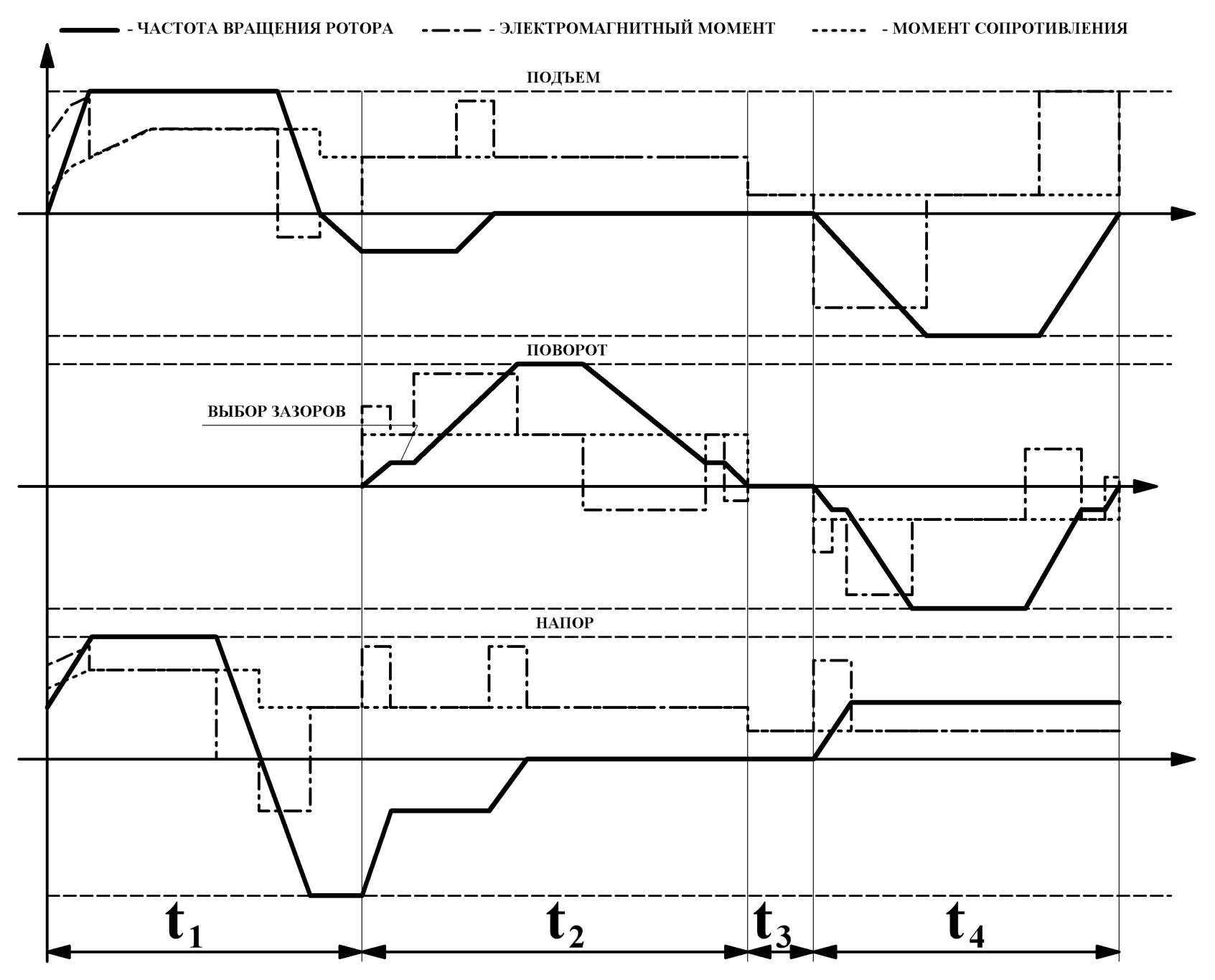
Рис. 1.1. Нагрузочные диаграммы главных электроприводов экскаваторов - лопат
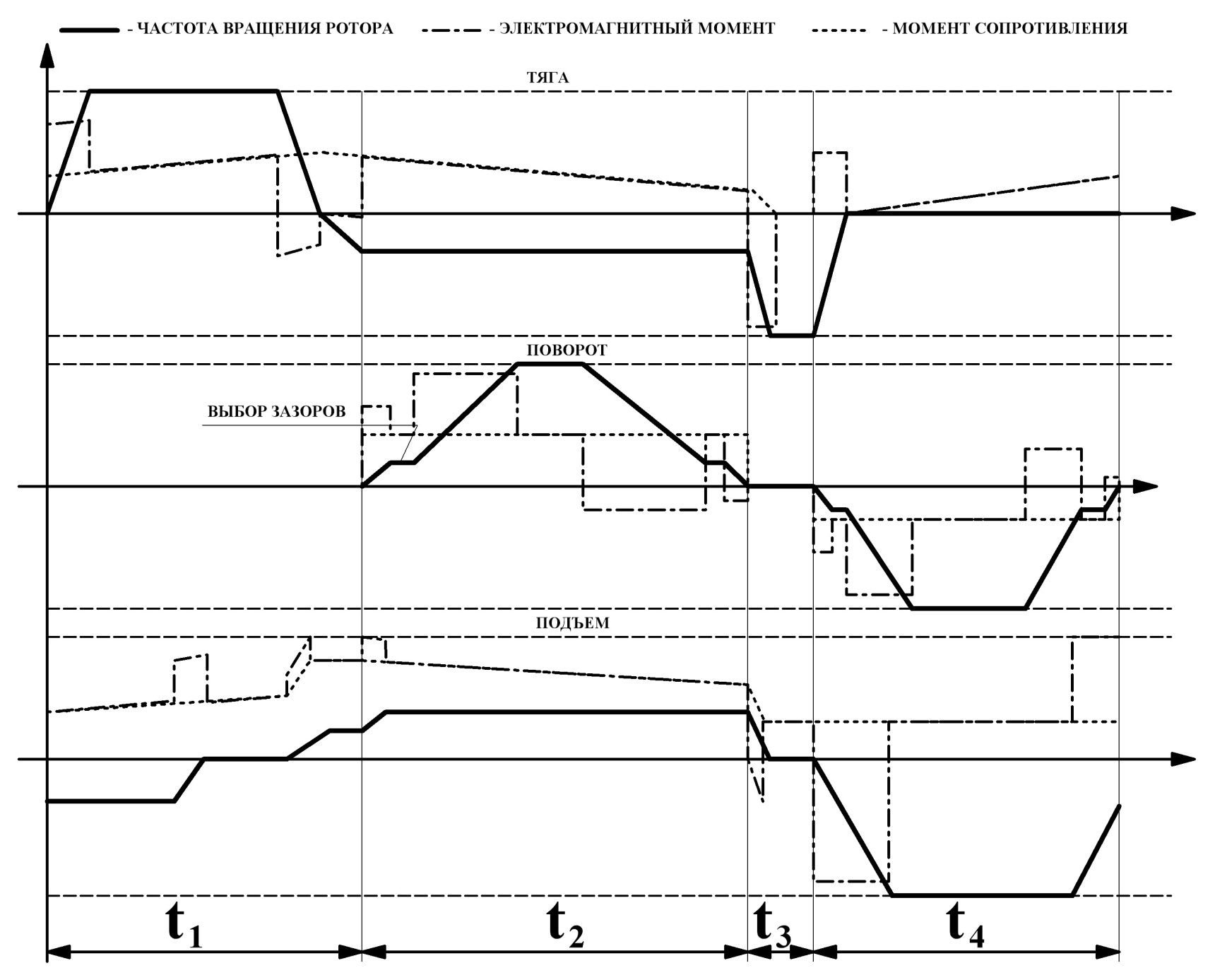
Рис. 1.2. Нагрузочные диаграммы главных электроприводов экскаваторов – драглайнов
АЭП экскаваторов работают в весьма непростых условиях вибрации, ударов, трясок и повышенной запыленности. Электродвигатели работают в повторно – кратковременном режиме с частыми пусками и торможениями. Кроме того, в механических передачах экскаваторов имеются гибкие связи и значительные зазоры.
Основными особенностями АЭП механизмов экскаваторов, участвующих в копании, являются: стохастически – изменяющийся момент сопротивления и частые перегрузки, вызванные стопорениями рабочего органа.