


«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Структура программного обеспечения ( ПО).
Программное обеспечение САиУ является такой же неотъемлемой частью современной системы , как и аппаратное обеспечение. От правильности проектирования и использования ПО зависят все основные показатели качества.
•Часть программного обеспечения - системное ПО обычно поставляется фирмой и рассчитано на конкретную вычислительную платформу, используемую в конкретной САиУ.
•Функционально близко к системному программному обеспечению
находятся SCADA системы (System Control And Data Aquisition)- специальное программное обеспечение, предназначеное не для автоматического управления, а для оперативного наблюдения за ходом процессов в системе , ведения архивов , отчётов , наглядного
представления текущих параметров процессов , организации виртуальных измерительных приборов, дисплеев и т . п.. Эти системы обычно не работают в жёстком реальном времени В целях обеспечения независимости от производителя а также в целях повышения надёжности и проблемной ориентированности часто такие системы создают специально.

«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Структура программного обеспечения ( ПО).
•Другая часть программного обеспечения - драйверы устройств должна
быть результатом согласования фирм- разработчиков устройств и фирм-разработчиков системного ПО. Драайвер (англ. driver,) — компьютерное программное обеспечение, с
помощью которого другое программное обеспечение (операционная система) получает доступ к аппаратному обеспечению некоторого устройства.
•Наконец , имеется ещё один тип программного обеспечения, предназначенного для решения либо конкретных вычислительных задач , возникающих в данной САиУ, или для управления специальными ( нестандартными ) устройствами. Это прикладное программное
обеспечение вынужден создавать разработчик конкретной САиУ. При этом часто приходится использовать язык ассемблера , так как требуется высокое быстродействие и предсказуемость поведения программы. Особенно это справедливо при программировании специализированных контроллеров , непосредственно связанных с объектами управления.

«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Структура
программного
обеспечения ( ПО).
Важнейшим свойством программного обеспечения САиУ является его иерархичность . Можно выделить, по крайней мере, три уровня иерархии:
•уровень диспетчерского
управления;
•прикладной уровень управления, на котором происходит решение
сложных вычислительных задач , выработка целей , сложная обработка
( возможно , в реальном времени ) измерительной информации ;
•уровень локальных контроллеров
( локальных САУ).

«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Операционные системы, системное программное обеспечение.
Возможность работы в реальном времени , обеспечение высокого уровня надежности при работе, поддержка стандартов на все виды интерфейсов - все эти требования позволяют выделить промышленные вычислительные системы в отдельный класс.
Основное требование ( помимо надёжности), предъявляемое к вычислительным системам данного класса , - это гарантированное время реакции на произошедшее событие .
Можно выделить отличительные качества промышленных вычислительных систем :
•максимально возможная адаптация вычислительного блока к датчикам и периферийным устройствам;
•использование распространенных и проверенных и отработанных промышленных стандартов (как правило , VME), что позволяет обеспечить совместимость большого разнообразия оборудования и унифицировать протокол взаимодействия с ним ;
•использование операционных систем реального времени (ОСРВ ), гарантирующих выработку сигналов обратной связи за фиксированный промежуток времени .

«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Операционные системы, операционная система
реального времени (ОСРВ).
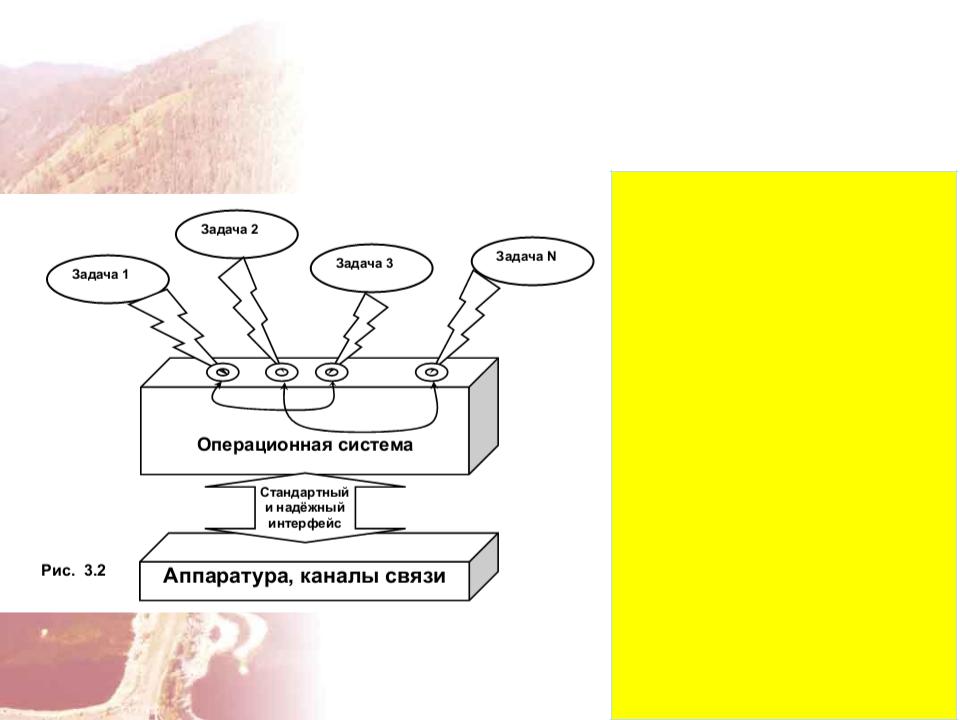
Как и всякая другая операционная система , ОСРВ выполняет следующие основные функции, необходимые при использовании средств вычислительной техники в автоматике :
•обеспечение бесконфликтного взаимодействия множества параллельных задач (процессов) с аппаратурой;
•бесконфликтное разделение общих ресурсов вычислительной системы ( память, диски и т.п.);
•обеспечение безопасной передачи данных между процессами в защищённых адресных пространствах;
•обеспечение стандартных средств доступа к ресурсам, чтобы программисту не надо было писать соответствующие коды;
•обеспечение стандартных телекоммуникаций и сетевой поддержки ;
•поддержание службы времени ( системных и сетевых таймеров);
•создание вычислительной среды повышенной надёжности;
«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Операционные
системы,
операционная система реального времени (ОСРВ).
Но именно ОСРВ эти функции
выполняет за гарантированное и известное время .
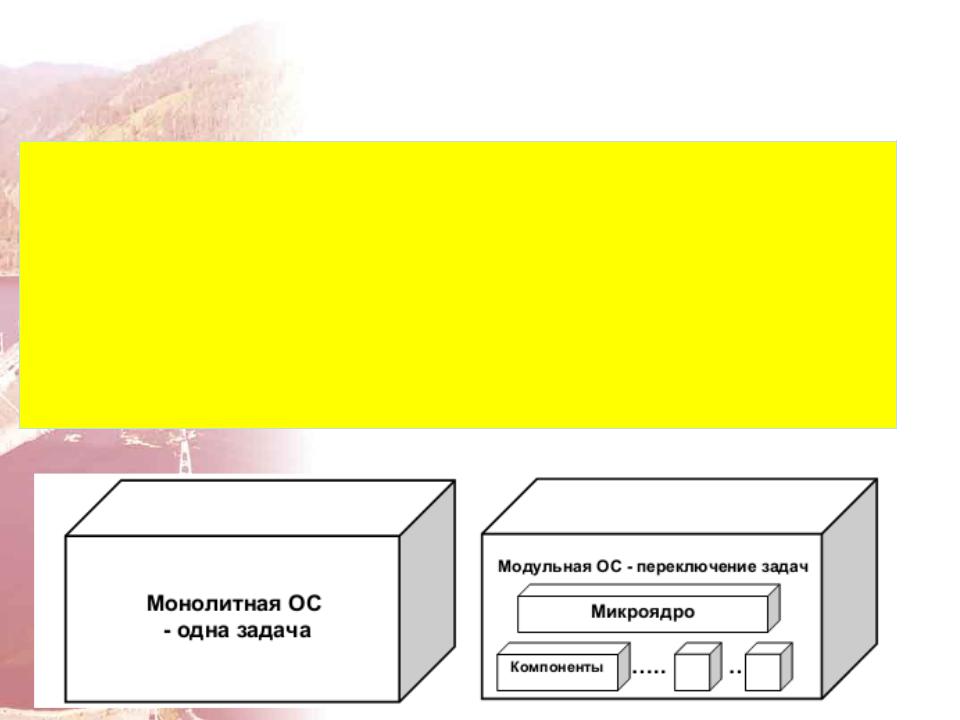
Существуют разные структуры ОСРВ ( монолитные, на основе микроядра, объектно- ориентированные ), но главное заключается в том , что любая ОС отделяет собой аппаратуру от исполняемых задач , гарантируя стандартные надёжные методы доступа к
ней , и обеспечивает взаимодействие между задачами.

«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Операционные системы, операционная система
реального времени (ОСРВ).
В свою очередь, сама ОС может быть построена, |
как единый блок программного |
||
обеспечения, а может |
быть модульной . Частным |
случаем модульного построения |
|
является |
архитектура |
микроядра. Главное здесь заключается в том , что в основе |
|
ОС лежит |
компактное , |
быстрое ядро, которое может быть легко размещено в |
|
ПЗУ . Другие дополнительные модули ОС добавляются по мере необходимости ( в частности, могут оперативно заменяться и дорабатываться).
«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Операционные системы, операционная система
реального времени (ОСРВ).
Модульное построение ОС имеет при этом один важный недостаток - при интенсивном использовании функций ( вызовов ) операционной системы скорость её работы является не самой высокой , по крайней мере, ниже, чем системы с монолитной архитектурой . Это происходит из -за того , что дополнительные, не находящиеся в ядре, функции ОС вызываются, как процессы, при этом происходит переключение задач в многозадачном режиме, а на это может потребоваться значительно больше времени .

«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Операционные системы, обзор операционных систем
реального времени (ОСРВ).
1.Многие современные операционные системы , способные обрабатывать "на лету" поступающие запросы (за счет распараллеливания , оптимизации ввода -вывода и оптимального планирования), в какой-то степени можно отнести к операционным системам реального времени .
2. Как правило , такие операционные системы являются клонами ОС UNIX, где основным принципом построения ОС является разделение времени с целью предоставить каждому пользователю свой ресурс . По своей структуре ядро классических систем UNIX не позволяют получать откликов в течение заранее определенного интервала времени .
3.Главный критерий , по которому операционные системы можно разделить на обычные и операционные системы реального времени , - это детерминированная , строго
определенная задержка времени ожидания или прерывания, необходимое процессу , прежде чем он получит управление.
4. В ОСРВ различают два основных элемента - это время отклика и детерминизм. Время отклика определяет, как часто система может "отвечать " в среднем . Детерминизм - это
показатель наибольшей задержки системы ( или , по-другому, предсказуемость времени реакции). Некоторые операционные системы , например DOS, являются недетерминированными и поэтому непригодны для использования в реальном масштабе времени .
«Программное обеспечение АСУТП ГЭС: системное, прикладное и инструментальное ПО.»
Операционные системы, обзор операционных систем реального времени (ОСРВ).
Системы реального времени |
также |
|
делятся на "soft real-time" |
и "hard real-time" - мягкое реальное время |
|
( МРВ) и жёсткое |
|
|
реальное время (ЖРВ). |
|
|
•Для МРВ-систем возможна |
потеря внешнего события |
|
(прерывания) без оказания |
серьезного влияния на систему в целом . |
|
•Потерянное прерывание в ситуации с ЖРВ имеет серьезные последствия. Например, система исключения столкновений на авиалиниях, которая " потеряет " аварийную ситуацию может оказаться слишком " накладной".
•Граница между МРВ и ЖРВ размыта . Можно понимать разницу между ними, как различие в поведении функции штрафа за задержку в обслуживании: в системе МРВ эта функция растёт не очень резко, а в системе ЖРВ функция штрафа может иметь практически разрывный характер , при котором время отклика, превышающее некоторое Т max. является неприемлемым в силу слишком высокого штрафа. Таким образом , принципиального теоретического различия между ЖРВ и МРВ нет , различие скорее количественное .