

2.5. Структура цуПа
2.5.1. Комплекс технических средств цуПа
Центральный управляющий пункт является центром, куда поступает различная информация о функционировании комплекса технических средств, параметрах транспортных потоков со всего района управления АСУД.
ЦУП состоит из нескольких ПЭВМ, объединенных средствами локальной сети. Каждая ПЭВМ имеет свое конкретное назначение и выполняет прием и обработку информации, а также выдачу решений по возникающим проблемам.
Структура ЦУП относится к открытому типу, т.е. позволят компоновать и расширять систему устройствами для решения нескольких задач. На рис. 2.9 приведена структурная схема ЦУПа АСУД.

Рис. 2.9. Структурная схема ЦУП АСУД
Комплекс вычислительных средств ЦУПа включает следующие устройства:
-
СЕРВЕР – ПЭВМ, обслуживающая локальные сети №1 и 2 и модемную связь;
-
АРМ ТП – ПЭВМ для сбора и анализа статистических данных о транспортных потоках;
-
АРМ деж. – ПЭВМ для оперативного дежурного ЦУПа (получение справок, ввод данных, поступающих по телефону);
-
АРМ прог. – ПЭВМ программиста системы для изменения файлов привязки и перекомпоновки ПО;
-
ПЭВМ-У – управляющая ПЭВМ на базе КРЦ;
-
ТКП – табло коллективного пользования (диагональ 116 см) на базе ПЭВМ;
-
М – модем для выхода в ГТС;
-
ДПОУ – дисплейный пульт оперативного управления.
Необходимо учитывать, что приведенная структура ЦУПа позволяет проводить расширение района управления АСУД добавлением КРЦ. Такая мера позволяет без изменений и реконструкций увеличивать количество охватываемых перекрестков на 48 с каждым КРЦ.
2.5.2. Контроллер районного центра (крц)
Назначение изделия. КРЦ предназначен для управления дорожными контроллерами, подключаемыми как непосредственно по радиальным каналам связи, так и через контроллеры КЗЦ ТУ 25-1724.002-86.
|
КРЦ используются в автоматизированных системах управления дорожным движением разных поколений, таких как АСС-УД, АСУД «Сигнал», АСУД-С, и рассчитаны на непрерывную круглосуточную работу в стационарных условиях в отапливаемом помещении при температуре окружающего воздуха от 5 до 40 C и относительной влажности от 5 до 95 %. |
Рис. 2.10. Внешний вид КРЦ |

Технические характеристики. Технические характеристики КРЦ различных модификаций приведены в табл. 2.4.
КРЦ модификаций КРЦ-01, КРЦ-02, КРЦ-06, КРЦ-07, КРЦ-08 обеспечивают обмен информацией ТУ-ТС с дорожными контроллерами (ДК).
Таблица 2.4
|
Технические данные |
Модификации |
||||||||
|
КРЦ |
КРЦ-01 |
КРЦ-02 |
КРЦ-03 |
КРЦ-04 |
КРЦ-05 |
КРЦ-06 |
КРЦ-07 |
КРЦ-08 |
|
|
Количество линий связи с ДК |
48 |
32 |
16 |
- |
- |
- |
32 |
16 |
16 |
|
Количество линий связи с КЗЦ |
- |
- |
- |
3 |
2 |
1 |
1 |
1 |
2 |
Параметры линий связи с ДК:
-
тип – выделенная пара в кабеле городской телефонной сети либо специально проложенный кабель;
-
сопротивление линии постоянному току – не более 2850 Ом;
-
емкость линии – не более 0,75 мкФ.
Количество ДК, подключаемых к каждой линии связи, – 2.
КРЦ обеспечивают гальваническую развязку с линиями связи.
Обмен с ДК осуществляется синхронно, в полудуплексном режиме, со скоростью 100 бит/с.
Инициатива обмена принадлежит КРЦ, длительность цикла обмена со всеми ДК – 1 с.
Количество передаваемых в каждую линию связи команд ТУ – 3 байта за цикл.
Количество принимаемых из каждой линии связи сигналов ТИ-ТС – 6 байтов за цикл.
Модификации КРЦ-03, КРЦ-04, КРЦ-05, КРЦ-06, КРЦ-07, КРЦ-08 обеспечивают обмен информацией ТУ-ТС с контроллерами КЗЦ.
Сопряжение с линией связи – по стыку С1-ФЛ ГОСТ 27232.
Принцип обмена информацией – синхронный, режим обмена – полудуплексный, инициатива обмена принадлежит КРЦ, длительность цикла обмена – 1с.
Способ передачи информации в линию связи – последовательный с применением биимпульсного кодирования.
Скорость передачи – 1200 бит/с.
Реализация алгоритмов работы КРЦ – программным путем с использованием ПЭВМ.
При работе КРЦ обеспечивается вывод на монитор различной информации и оперативное воздействие через клавиатуру.
Мощность, потребляемая КРЦ, – не более 50 Вт.
Габаритные размеры КРЦ – не более 190х472х435 мм.
Масса КРЦ – не более 13,5 кг.
Среднее время восстановления – не более 15 мин.
Средний срок службы КРЦ – не менее 10 лет при условии восстановления его составных и механических частей по истечении их ресурсов.
Состав изделия. КРЦ содержит следующие основные составные части:
-
системный блок стандартной ПЭВМ с программным обеспечением АСУД;
-
субблок ДПА – 1 шт.;
-
субблок СС – 1 шт.;
-
субблоки ЛУ16 и МБИ – согласно табл. 2.5;
-
жгуты связи.
Таблица 2.5
|
Субблок |
Модификации |
||||||||
|
КРЦ |
КРЦ-01 |
КРЦ-02 |
КРЦ-03 |
КРЦ-04 |
КРЦ-05 |
КРЦ-06 |
КРЦ-07 |
КРЦ-08 |
|
|
ЛУ16 |
3 |
2 |
1 |
- |
- |
- |
2 |
1 |
1 |
|
МБИ |
- |
- |
- |
3 |
2 |
1 |
1 |
1 |
2 |
Устройство и работа. Конструктивно КРЦ выполнен в корпусе MIDI TOWER системного блока ПЭВМ. В стандартный блок добавляется субблок ДПА, устанавливаемый на свободное место с подключением к шине ISA. В свободных отсеках, отведенных для дисководов, размещаются субблоки ЛУ16, МБИ и СС. Связь субблоков между собой осуществляется с помощью ленточных жгутов.
Системный блок персонального компьютера является покупным изделием и кроме стандартных функций выполняет также функции по обмену информацией с субблоком ДПА в соответствии со специальной программой, занесенной в компьютер.
Субблок ДПА предназначен для ежесекундного обмена информацией и ТУ-ТС с персональным компьютером, а также с субблоками ЛУ16 и субблоками МБИ.
Субблок ЛУ16 осуществляет ежесекундный обмен информацией ТУ-ТС с субблоком ДПА и с 32-мя дорожными контроллерами по 16-ти каналам связи.
Субблок МБИ предназначен для ежесекундного обмена информацией ТУ-ТС с субблоком ДПА и двумя контроллерами КЗЦ.
Субблок СС содержит источник питания, формирующий низковольтные напряжения для субблоков ЛУ16, а также обеспечивает защиту от перегрузок и перенапряжений.
На рис. 2.11 приведено построение модификации КРЦ, содержащей 3 субблока ЛУ16.
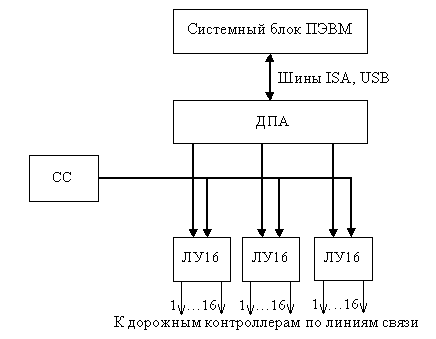
Рис. 2.11. Структурная схема КРЦ
Сетевое напряжение питания подается на вилку XP1 системного блока персонального компьютера А16, с которой оно поступает через жгут А17 «А1-А16» на вилку ХР1 субблока СС. Вырабатываемые СС низковольтные напряжения питания подаются через вилку ХР3 СС на розетку XS1 жгута А2 «ЛУ-ДПА». Розетки XS1-XS5 жгута «ЛУ-ДПА» соединяются между собой, обеспечивая связь между субблоками ЛУ16 и ДПА и подачу на них напряжений питания.
Подключение субблоков ЛУ16 к дорожным контроллерам производится через жгуты «ЛС-ЛУ16».
Подключение субблока ДПА к системному блоку осуществляется через розетку шины ISA.