

Тема № 4.Зан.№ 11 ИНДИКАТОРНАЯ СИСТЕМА РЛС П-18
1. Назначение, состав и основные технические характеристики
Индикаторная система предназначена для визуального наблюдения за воздушной обстановкой в зоне обнаружения станции или в зоне обнаружения сопряженных с ней радиолокационных средств, определения координат и принадлежности целей к своим вооруженным силам, а также для контроля работы отдельных блоков и систем станции.
Индикаторная система включает в себя (рис. 13):
1) индикатор кругового обзора (ИКО) с блоками:
горизонтальной развертки (бл. 7);
вертикальной развертки (бл. 8);
видеоусилителя (бл. 9);
трубки (бл. 10):
эхо-сигналов (бл. 19);
сигналов изображения (бл. 25);
калибратора (бл. 18);
2) выносной индикатор кругового обзора (ВИКО) с блоками:
горизонтальной развертки (бл. 7)
вертикальной развертки (бл. 8)
видеоусилителя (бл. 9);
трубки (бл. 10);
сигналов изображения (бл. 25);
управления - визиром ВИКО (бл. 24);
целеуказания (бл. 26);
3) индикатор контроля (бл. 56).
Основные характеристики индикаторной системы:
- развертка экранов - радиально-круговая – осуществляется магнитным полем, которое вращается при неподвижных отклоняющих катушках;
- индикация целей – яркостная;
- эхо-сигналы наблюдаются на экране РЛС при условии, что на выходе приемника отношение Uс /Uш = 1,2 ÷ 1,5;
- масштаб работы индикаторов: 0 ÷ 90км, 0 ÷ 180 км, 0 ÷ 360 км.
- дальность до цели определяется с помощью масштабных эл. отметок, нанесенных на экран РЛС с дискретностью 10км, 50км, и 100км;
- азимут цели определяется с помощью радиальных отметок азимута нанесенных на экран РЛС с дискретностью 5о , 30о или 10о, 30о .
В отличие от ИКО на ВИКО дополнительно формируется визирная развертка и маркер дальности с помощью которых осуществляется выдача целеуказания по азимуту и дальности.
Индикаторная система может работать в следующих режимах:
- отображение информации станции (режим А);
- отображение информации с сопрягаемых РЛ средств (режим В );
- отображение совмещенной информации станции и сопрягаемого РЛ средства (режим В + А).
Кроме того, предусмотрена возможность использования ИКО для ориентирования станции, для контроля формы и примерной оценки правильности ДНА в горизонтальной плоскости и для определения азимута постановщика помех в режиме «Пеленг».
В ИКО и ВИКО применена ЭЛТ типа З1ЛМ32В с яркостной индикацией, большим временем послесвечения и магнитной системой фокусировки и отклонения луча.
Определение координат и опознавание целей производится визуально по экранам ИКО и ВИКО, используя масштабную сетку отметок дальности 10, 50 и 100 км и азимута - с градацией по яркости 10°, 30° или 5°, 30° . Толщина сфокусированной линии развертки 10-км масштабных колец и 5 и 10 градусных азимутальных линий не более 1,5 мм.
Индикатор контроля обеспечивает контроль работы блоков и систем станции и может использоваться в качестве вспомогательного индикатора дальности с линейной электрической шкалой и амплитудной индикацией целей.
Аппаратура ИКО и ВИКО выполнена на транзисторной элементной базе, что обеспечивает высокую надежность в работе.
ВИКО может устанавливаться за пределами РЛС на удалении до 500 м, а также устанавливаться в аппаратной машине РЛС и подключаться к аппаратуре для увеличения пропускной способности.
2. Работа индикатора кругового обзора по функциональной схеме
ИКО, как правило, позволяют вести обзор в трех режимах работы:
- кругового обзора, когда в определенном масштабе просматривается вся зона обзора РЛС;
- кольцевого обзора, когда просматривается вся зона обзора участками в укрупненном масштабе;
- секторного обзора, когда наблюдение ведется только в определенном секторе.
Для получения режима кольцевого обзора применяется схема задержки развертки дальности, входящая в тракт развертки дальности.
Для получения секторного режима применяется устройство смещения центра развертки.
Тракт формирования развертки азимута обеспечивает синхронное с антенной вращение развертки дальности. По способу получения вращающейся развертки все ИКО принято разделять на две группы:
— с вращающейся отклоняющей системой;
— с неподвижной отклоняющей системой.
Особенность индикаторов первой группы заключается в том, что вращение развертки дальности по азимуту синхронно с антенной осуществляется путем механического вращения отклоняющей системы, в результате чего вращается развертка дальности.
В индикаторах второй группы отклоняющая система закреплена неподвижно на горловине ЭЛТ, а вращение развертки происходит за счет вращающегося магнитного поля отклоняющей системы. В ИКО РЛС П-18 применен именно этот метод вращения развертки.
Итак, для получения радиально-круговой развертки с помощью неподвижной отклоняющей системы необходимо в горловине трубки создать линейно изменяющееся магнитное поле, вращающееся синхронно с вращением антенны.
Сама неподвижная отклоняющая система состоит из двух пар катушек, расположенных взаимно перпендикулярно относительно оси электронной лучевой трубки. Через эти катушки протекает пилообразный ток, промодулированный по закону вращения антенны и сдвинутый по фазе, в этих катушках на 90°. Токи в отклоняющих катушках:
i1 = f(τ)∙sinΩАt,
i2 = f(τ)∙cos Ω Аt
где f (τ) — закон изменения пилообразного тока;
ΩА — угловая скорость вращения антенны;
ΩАt—текущий азимут антенны.
В результате действия токов i1 и i2 возникают магнитные потоки, изменяющиеся по такому же закону;
Ф1 = z∙f (τ)∙sinΩАt,
Ф2 = z∙f (τ )∙cos ΩАt,
где z-—коэффициент, определяющий связь между током в катушке и магнитным потоком.
В горловине трубки действует результирующее поле, которое и отклоняет электронный луч:
Фрез = √ Ф12 + Ф2 2 .= z∙f(τ)
Положение вектора результирующего поля определяется следующим образом:
arc tg(sinΩАt/ cos ΩАt) = ΩАt = β,
т. е. соответствует текущему азимуту. Следовательно, результирующее поле вращается синхронно с вращением антенны. Таким образом, для создания вращающейся развертки необходимо сформировать пилообразное напряжение и промодулировать его по закону синуса и косинуса угла поворота антенны. Пилообразное напряжение формируется генератором в канале развертки дальности. Затем это напряжение расщепляется на две составляющие, сдвинутые одна относительно другой на 90°. Каждая из этих составляющих модулируется по закону вращения антенны.
Для расщепления чаще всего используются синус-косинусные вращающиеся трансформаторы (СКВТ) и синус-косинусные потенциометры, которые механически надежны, могут непосредственно нагружаться отклоняющими катушками. Блок-схема ИКО с неподвижной отклоняющей системой изображена на рис. 1
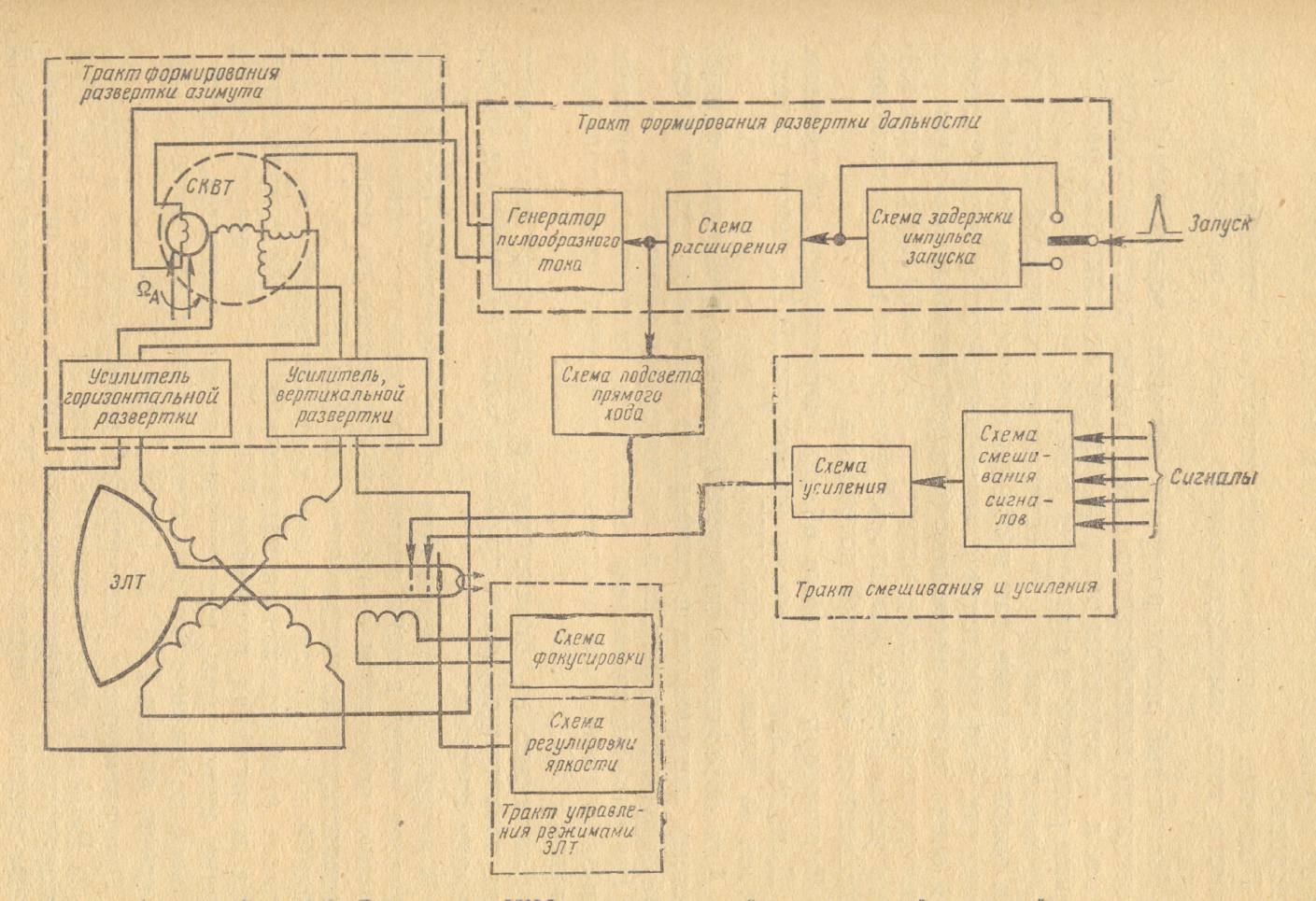
Рис. 1 Блок-схема ИКО с неподвижной отклоняющей системой.