

11.Базис пространства : Разложение вектора по произвольному базису.
Базисом в пространстве называется любая система из n- линейно независимых векторов. Каждый вектор из , не входящих в базис, можно представить в виде линейной комбинации базисных векторов, т.е разложить по базису.
Пусть
B={ ,
,
 ,
, ,
,
 ,…
,… }- базис пространства
.
Тогда найдутся такие числа
}- базис пространства
.
Тогда найдутся такие числа
 ,
что
,
что
B=
Коэффициенты
разложения
 ,
называются координатами вектора b в
базисе. Если задан бвзис, то коэффициенты
вектора определяются однозначно
,
называются координатами вектора b в
базисе. Если задан бвзис, то коэффициенты
вектора определяются однозначно
12. Различные виды уравнения прямой на плоскости. Угол между прямыми.
Определение. Любая прямая на плоскости может быть задана уравнением первого порядка Ах + Ву + С = 0, причем постоянные А, В не равны нулю одновременно, т.е. А2 + В2 не равно 0. Это уравнение первого порядка называют общим уравнением прямой.
В зависимости от значений постоянных А,В и С возможны следующие частные случаи:
• C = 0, А ≠0, В ≠ 0 – прямая проходит через начало координат
• А = 0, В ≠0, С ≠0 { By + C = 0}- прямая параллельна оси Ох
• В = 0, А ≠0, С ≠ 0 { Ax + C = 0} – прямая параллельна оси Оу
• В = С = 0, А ≠0 – прямая совпадает с осью Оу
• А = С = 0, В ≠0 – прямая совпадает с осью Ох
Для решение задач уравнений используют специальный вид уравнения прямой.
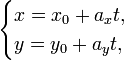
Векторное параметрическое уравнение прямой
Векторное
параметрическое уравнение прямой
задается вектором ![]() конец
которого лежит на прямой, и направляющим
вектором прямой
конец
которого лежит на прямой, и направляющим
вектором прямой ![]() Параметр
Параметр ![]() пробегает
все действительные значения.
пробегает
все действительные значения.
![]()
]Параметрические уравнения прямой
Параметрические уравнения прямой могут быть записаны в виде:
где
—
производный параметр, ![]() —
координаты
—
координаты ![]() и
и ![]() направляющего
вектора прямой. При
этом
направляющего
вектора прямой. При
этом
![]()
Каноническое уравнение прямой
Каноническое уравнение получается из параметрическиx уравнений делением одного уравнения на другое:
![]()
где ![]() —
координаты
и
направляющего
вектора прямой,
—
координаты
и
направляющего
вектора прямой, ![]() и
и ![]() координаты
точки, принадлежащей прямой.
координаты
точки, принадлежащей прямой.
Угол межу прямыми:
Пусть
прямые ![]() и
и ![]() заданы
каноническими уравнениями
заданы
каноническими уравнениями ![]() и
и ![]() Очевидно,
угол между прямыми равен углу между
направляющими векторами этих
прямых:
Очевидно,
угол между прямыми равен углу между
направляющими векторами этих
прямых:  Тогда
Тогда
|
|

Если ![]() то
то ![]()
Если ![]() ,
то
,
то ![]() или
или ![]()
![]() .
.
13. Прямая и плоскость в пространстве.
1. Условия параллельности и перпендикулярности.
Пусть
заданы прямая:

И плоскость: Ах + Ву + С = 0
Прямая параллельная плоскости в том и только в том случае, когда ее направляющий вектор a={l; m; n} перпендикулярен нормальному вектору N= { A; B; C} плоскости. Отсюда получаем условие параллельности прямой и плоскости: Al+Bm+Cn=0
Прямая
перпендикулярна плоскости в том и только
в случае, когда ее направляющий вектор
коллинеарен нормальному вектору
плоскости. Отсюда получаем условие
перпендикулярности прямой и плоскости:

2.Угол между прямой и плоскостью:
![]()
14.Основная задача линейного программирования. Геометрический метод решения задачи лп с двумя переменными.
Основная
задача линейного программирования
состоит в следующем. Задана
система
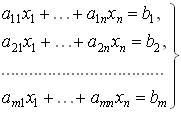 (6.10)
m линейных
алгебраических уравнений
с n неизвестными x1,...,xn и
линейная форма относительно этих же
неизвестных:
F
= c1x1 +
... + cnxn.
(6.11)
Требуется среди всех
неотрицательных решений системы (10)
выбрать такое, при котором форма F принимает
наименьшее значение
(минимизируется).
Определение: Система
(6.10) называется системой ограничений
данной задачи.
Сами
равенства (6.10) называются
ограничениями-равенствами. Отметим,
что кроме ограничений-равенств в основу
задач входят также ограничения-неравенства
x1≥0,...,xn≥0
Определение: Всякое
неотрицательное решение x1(0),...,xn(0)(xi(0)≥0;
i=1,...,n) системы
(6.10) назовем допустимым.
Допустимое решение часто называют планом
задачи линейного
программирования.
Определение: Допустимое
решение системы (6.10), минимизирующее
форму F,
назовем оптимальным.
(6.10)
m линейных
алгебраических уравнений
с n неизвестными x1,...,xn и
линейная форма относительно этих же
неизвестных:
F
= c1x1 +
... + cnxn.
(6.11)
Требуется среди всех
неотрицательных решений системы (10)
выбрать такое, при котором форма F принимает
наименьшее значение
(минимизируется).
Определение: Система
(6.10) называется системой ограничений
данной задачи.
Сами
равенства (6.10) называются
ограничениями-равенствами. Отметим,
что кроме ограничений-равенств в основу
задач входят также ограничения-неравенства
x1≥0,...,xn≥0
Определение: Всякое
неотрицательное решение x1(0),...,xn(0)(xi(0)≥0;
i=1,...,n) системы
(6.10) назовем допустимым.
Допустимое решение часто называют планом
задачи линейного
программирования.
Определение: Допустимое
решение системы (6.10), минимизирующее
форму F,
назовем оптимальным.
Геометрический метод решения задачи ЛП с двумя переменными.
![]() (8)
(8)
является
полуплоскость. Для того, чтобы определить,
какая из двух полуплоскостей соответствует
этому неравенству, нужно привести его
к виду ![]() или
или ![]() .
Тогда искомая полуплоскость в первом
случае расположена выше
прямой a0 + a1x1 + a2x2 =
0, а во втором - ниже нее. Если a2=0,
то неравенство (8) имеет вид
.
Тогда искомая полуплоскость в первом
случае расположена выше
прямой a0 + a1x1 + a2x2 =
0, а во втором - ниже нее. Если a2=0,
то неравенство (8) имеет вид ![]() ;
в этом случае получим либо
;
в этом случае получим либо ![]() -
правую полуплоскость, либо
-
правую полуплоскость, либо ![]() -
левую полуплоскость.
-
левую полуплоскость.
Областью решений системы неравенств является пересечение конечного числа полуплоскостей, описываемых каждым отдельным неравенством. Это пересечение представляет собой многоугольную область G. Она может быть как ограниченной, так и неограниченной и даже пустой (если система неравенств противоречива).

Область решений G обладает важным свойством выпуклости. Область называется выпуклой, если произвольные две ее точки можно соединить отрезком, целиком принадлежащим данной области. На рис. показаны выпуклая область G1 и невыпуклая область G2. В области G1 две ее произвольные точки А1 и В1 можно соединить отрезком, все точки которого принадлежат области G1. В области G2 можно выбрать такие две ее точки А2 и В2, что не все точки отрезка А2В2принадлежат области G2.
Опорной прямой называется прямая, которая имеет с областью по крайней мере одну общую точку, при этом вся область расположена по одну сторону от этой прямой. На рис. показаны две опорные прямые l1 и l2, т. е. в данном случае прямые проходят соответственно через вершину многоугольника и через одну из его сторон.