

Глава первая. Электропривод как система
1.1 Определение понятия «электропривод». Блок-схема электропривода
В настоящее время в промышленности, на транспорте, в сельскохозяйственном производстве, в коммунальной сфере и быту практически 100% механической энергии для работы машин и механизмов получают из электрической энергии за счёт применения электроприводов.
Электропривод – это электромеханическая система, состоящая в общем случае из взаимодействующих электрических преобразователей, электрических машин, механических передач и систем управления, служащих для приведения в движение рабочих машин, преобразования электрической энергии в механическую энергию (или обратно), и управления преобразованной энергией в соответствии с требованиями технологического процесса. Блок-схема электропривода приведена на рис. 1.1.
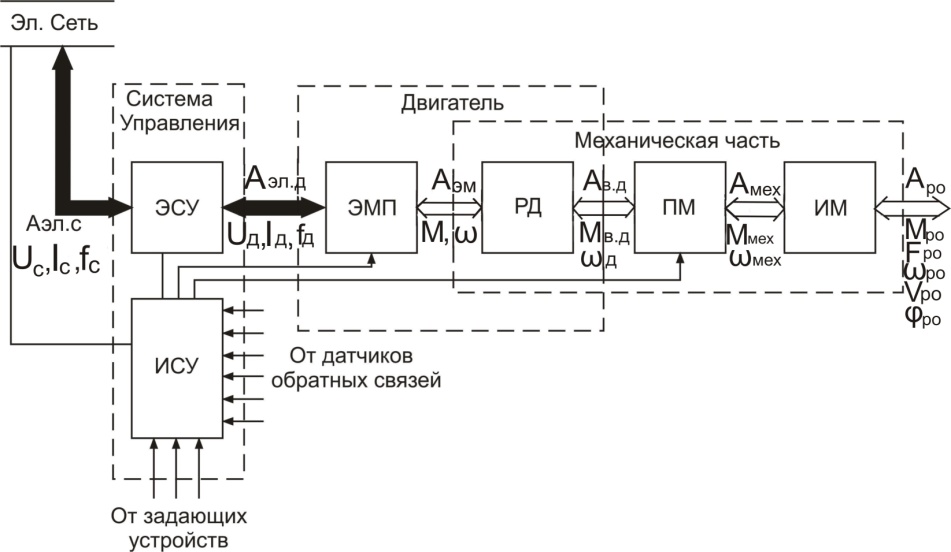
Рис. 1.1. Блок-схема электропривода
Электропривод состоит из двух каналов: силового и информационного.
Силовой
канал в свою очередь представляется
электрическим и механическим каналами.
В электрическую часть силового канала
входит энергетическая часть системы
управления ЭСУ (электромашинные или
статические преобразователи электрической
энергии) и электромеханический
преобразователь ЭМП (электрические
машины). ЭСУ передаёт и преобразовывает
электрическую энергию от источника
питания (шин промышленной электрической
сети, автономного электрического
генератора, аккумуляторной батареи и
т.п.) к ЭМП и обратно. ЭМП представляется
как идеализированный двигатель, в
котором происходит преобразование
электрической энергии ![]() в электромагнитную
в электромагнитную
![]() .
Ей соответствует электромагнитный
момент М, прикладываемый к реальному
ротору двигателя РД с механической
инерцией
.
Ей соответствует электромагнитный
момент М, прикладываемый к реальному
ротору двигателя РД с механической
инерцией
![]() и механическими
потерями.
и механическими
потерями.
Механическая часть силового канала включает в себя все вращающиеся и поступательно движущиеся элементы: ротор двигателя РД, передаточный механизм ПМ (валы, муфты, редукторы, барабаны и т.п.), и исполнительный орган рабочей машины ИМ, в котором полезно реализуется механическая энергия.
Информационная часть системы управления ИСУ, т.е. информационный канал осуществляет управление потоком энергии, а также сбор и обработку сведений о состоянии и функционировании системы, защиту, и диагностику её неисправностей.
Практически все процессы, связанные с механической энергией, движением, осуществляются электроприводом. В относительно небольшом числе промышленных установок используется гидропривод, ещё реже пневмопривод. Столь широкое повсеместное распространение электропривода обусловлено возможностью передачи электрической энергии на любые расстояния, постоянной готовностью к использованию, легкостью преобразования в другие виды энергии.
В настоящее время в приборных системах используются электроприводы, мощность которых составляет единицы микроватт, мощность электроприводов прокатных станов – десятки мегаватт (стан 5000 - привод валков клети потребляет 24 мВт), т.е. диапазон современных электроприводов по мощности превышает 1012. Такого же порядка и диапазон по скорости вращения: от нескольких оборотов в несколько десятков часов в установках вытягивания кристаллов полупроводников при очень жёстких требованиях к равномерности движения, до 150000 об/мин в шлифовальных станках.
С энергетической точки зрения электропривод является главным потребителем электрической энергии, более 60% всей производимой электрической энергии перерабатывается с помощью электропривода.
Электродвигатель является основным обязательным элементом электропривода, осуществляющим электромеханическое преобразование энергии. Электродвигатели различают:
- по роду тока (постоянный, переменный);
- по количеству и схеме соединения обмоток;
- по конструктивному исполнению.
Наиболее распространёнными двигателями являются:
- коллекторные двигатели постоянного тока с независимым (параллельным), последовательным и смешанным возбуждением;
- двигатели переменного тока асинхронные с короткозамкнутым ротором и фазным ротором, синхронные двигатели.
Преобразователи электрической энергии, входящие в ЭСУ, осуществляют преобразование параметров электрической энергии в электрическую же энергию, однако с другими параметрами:
-
энергию переменного тока с параметрами![]() ,
,
![]() ,
,![]() в энергию постоянного тока с параметрами
в энергию постоянного тока с параметрами![]() ,
;
,
;
- энергию переменного тока с параметрами , , в энергию переменного тока с параметрами , .
Преобразователи
электрической энергии необходимы для
создания требуемого управляющего
воздействия на координаты электропривода:
напряжение, напряжение и частота, ток,
момент, скорость, угол поворота вала
двигателя, рабочего органа механизма.
Управление координатами должно
осуществляться в пределах, разрешённых
конструкцией элементов электропривода,
чем обеспечивается надёжность работы
системы. Эти допустимые пределы обычно
связаны с номинальными значениями
координат, назначенными производителями
оборудования и обеспечивающими его
оптимальное использование. В системе
электропривода при управлении координатами
(потоком энергии) должны минимизироваться
потери ![]() во всех элементах
и к рабочему органу должна подводиться
требуемая в данный момент мощность.
во всех элементах
и к рабочему органу должна подводиться
требуемая в данный момент мощность.
Свойства и характеристики различных электроприводов, правильное управление их координатами в установившихся (статических) и переходных (динамических) режимах, оценка энергетических свойств, и, наконец, правильное проектирование силовой части электропривода и является предметом изучения данной дисциплины.