

4.3.1 Аппроксимация функций
Определение.
Аппроксимацией
1-го
порядка
или линейной
аппроксимацией
функции
класса
![]() в окрестности некоторой точки
в окрестности некоторой точки
![]() называют линейную функцию
называют линейную функцию
 (2)
(2)
Для
 в малой окрестности
величина
в малой окрестности
величина
 ~
~ .
.
Определение.
Аппроксимацией
2-го порядка
или квадратной
аппроксимацией
функции
класса
 в окрестности некоторой точки
называют функцию
в окрестности некоторой точки
называют функцию
 (3)
функция
(3)
функция
 будет квадратичной функцией по
и справедлива оценка
будет квадратичной функцией по
и справедлива оценка
 ~
~![]() .
.
Эти аппроксимации основаны на разложении в ряд Тейлора функции . В оптимизации могут использоваться и другие виды аппроксимаций: если – периодическая функция или близка к ней, то её можно аппроксимировать кусками рядов Фурье.
Общая схема методов 1-го порядка
На
первой итерации решается задача
 ,
где
,
где
 –
окрестность точки
некоторой формы с размерами
–
окрестность точки
некоторой формы с размерами
 .
.
Решение
этой задачи принимается за
 ,
переходим ко второй итерации и т.д., на
-ой
итерации в методах первого порядка по
известному
,
переходим ко второй итерации и т.д., на
-ой
итерации в методах первого порядка по
известному
 решается задача:
решается задача:
 (4)
(4)
где
 –
некоторая окрестность точки
размерами
,
решение принимается за
–
некоторая окрестность точки
размерами
,
решение принимается за
 и т. д.
и т. д.
Таким образом, методы 1-го порядка для задачи (1) отличаются лишь выбором формы и размером окрестности.
Индекс
у
![]() означает, что на практике на различных
итерациях окрестность может выбираться
по-разному.
означает, что на практике на различных
итерациях окрестность может выбираться
по-разному.
Примеры окрестностей:
1)
 – шар в
с центром в
и радиусом
.
– шар в
с центром в
и радиусом
.
2)
 – куб в
с центром в
размером
– куб в
с центром в
размером
 .
.
Существуют способы задания окрестностей, которые могут учитывать топологию функции .
 .
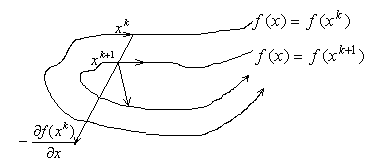
Геометрическая интерпретация.
.
Геометрическая интерпретация.

Дана
функция
,
дана точка
,
тогда задаём окрестность
 ,
в ней функция заменяется касательной
,
в ней функция заменяется касательной
 ,
min
её –
,
затем берём
,
min
её –
,
затем берём
 и т. д.
и т. д.
4.3.3 Выбор направления и шага в методах 1-гопорядка. Градиентные методы
Задачу (4) будем решать в 2 этапа:
I
этап: построение направлений итерации.
Полагаем в задаче (4) по известному
:
 где
где
 ,
в результате приходим к задаче:
,
в результате приходим к задаче:

 (5)
(5)
где
 – некоторая окрестность начала координат
в
размерами
.
В результате решения задачи (5) получаем
некоторый вектор
– некоторая окрестность начала координат
в
размерами
.
В результате решения задачи (5) получаем
некоторый вектор
 .
Он выбирается за направление на
-ой
итерации. При выборе направления его
размеры не важны, поэтому
.
Он выбирается за направление на
-ой
итерации. При выборе направления его
размеры не важны, поэтому
 ,
то есть
,
то есть
 имеет единичную длину.
имеет единичную длину.
Константа
 в (5) также на направление не влияет и её
отбрасывают. Таким образом, для нахождения
решается задача:
в (5) также на направление не влияет и её
отбрасывают. Таким образом, для нахождения
решается задача:

 (5*)
(5*)
Пример. Рассмотрим в (5) случай, когда окрестность есть единичный шар, то есть будем решать задачу:
 (6)
(6)
Решаем
задачу (6) геометрически:
 .
.

 – оптимальный
план задачи (6).
– оптимальный
план задачи (6).
Поскольку размеры направления нас не интересуют, то в методах 1-го порядка используют направление
 – направление
антиградиента (7)
– направление
антиградиента (7)
Методы 1-го порядка с таким направлением называются градиентными. Градиентные методы – наиболее популярные методы 1-го порядка. Если выбрать подходящий шаг, то они всегда позволяют уменьшить целевую функцию. Однако существуют задачи (1) с так называемой «овражной структурой», для которых градиентные методы плохо сходятся и надо направление выбирать другим (по-другому выбирать окрестность ).
Геометрическая интерпретация «овражной структуры».
 – линия с постоянной
высотой над уровнем океана. В случае
«овражной структуры», как правило,
градиент имеет большую длину и направлен
почти перпендикулярно к направлению
ведущему к оптимальному плану.
– линия с постоянной
высотой над уровнем океана. В случае
«овражной структуры», как правило,
градиент имеет большую длину и направлен
почти перпендикулярно к направлению
ведущему к оптимальному плану.
Замечание. В случае «овражной структуры» надо строить с учётом линий уровня целевой функции, желательно знать кривизну, 2-ую производную.
II этап: решение задачи (4), когда по известному приближению построено направление выбирается размер окрестности , то есть определяется размер шага в этом направлении.
Наиболее распространены 3 способа:
а) наилучший шаг в заданном направлении, решается задача

 (8)
(8)
где
 .
Точное решение задачи (8) выбирается за
.
Точное решение задачи (8) выбирается за
 .
.
Определение. Метод 1-го порядка, в котором шаг выбирается в виде (7), а направление наилучшим называется методом наискорейшего спуска.
б)
 ,
где
,
где
 – малое число, при этом способе на всех
итерациях шаг выбирается одинаковым.
– малое число, при этом способе на всех
итерациях шаг выбирается одинаковым.
Замечание. Если шаг выбрать достаточно большим, то даже если направление позволяет уменьшить целевую функцию, с этим шагом функция возрастёт. (Перейдём на противоположную сторону оврага и более высокую.)
в) метод последовательного дробления.
При
таком выборе шага задача (8) решается
подбором. Выбираем сначала
 и сравниваем значения
и
и сравниваем значения
и
 .
Если между числами знак
.
Если между числами знак
 ,
то шаг большой (целевая функция
увеличивается) и
уменьшают в несколько раз (10). Поле чего
повторяем сравнение. Если знак
,
то шаг большой (целевая функция
увеличивается) и
уменьшают в несколько раз (10). Поле чего
повторяем сравнение. Если знак
 ,
то шаг подходит, но и в этом случае его
можно улучшить (в несколько раз увеличить
или уменьшить
).
Существуют специальные схемы подбора
шага итераций.
,
то шаг подходит, но и в этом случае его
можно улучшить (в несколько раз увеличить
или уменьшить
).
Существуют специальные схемы подбора
шага итераций.