

Федеральное агентство по образованию
Государственное образовательное учреждение высшего
профессионального образования
Уфимский государственный авиационный технический университет
Кафедра вычислительной математики и кибернетики
Кафедра проектирования средств информатики
ТЕОРИЯ ГРАФОВ
Практикум
по дисциплине «Дискретная математика»
Уфа 2005
Составители: н.И. Житникова, г.И. Федорова, а.К. Галимов
УДК 519.6 (07)
ББК 22.193 (я7)
Теория графов: Практикум по дисциплине «Дискретная математика». /Уфимск. гос. авиац. техн. ун-т; Сост. Н.И. Житникова, Г.И. Федорова, А.К. Галимов. - Уфа, 2005. - 39 с.
Практикум содержит основные сведения о теории графов, примеры решения контрольных задач и задания для самостоятельной работы. Предназначен для студентов факультета информатики и робототехники специальности 010503: «Математическое обеспечение и администрирование информационных систем» и направления 230100: «Информатика и вычислительная техника», изучающих дисциплину «Дискретная математика».
Ил. 15. Библиогр.: 8 назв.
Рецензенты: Бронштейн Е.М.
Хабибуллин Б.Н.
© Уфимский государственный
авиационный технический университет, 2005
Содержание
Введение 4
1. Краткий перечень основных понятий теории графов 5
1.1. Общие понятия 5
1.2. Понятия смежности, инцидентности, степени 7
1.3. Маршруты и пути 7
1.4. Матрицы смежности и инцидентности 8
1.5. Связность. Компоненты связности 9
1.6. Матрицы достижимости и связности 9
1.7. Расстояния в графе 10
1.8. Образ и прообраз вершины и множества вершин 10
1.9. Нагруженные графы 11
1.10. Деревья и циклы 12
2. Решение контрольных задач 13
2.1. Компоненты сильной связности ориентированного графа 13
2.2. Расстояния в ориентированном графе 16
2.3. Минимальный путь в нагруженном ориентированном графе 20
2.4. Эйлеровы циклы и цепи 23
2.5. Минимальное остовное дерево 25
2. 6. Задача о коммивояжёре 27
3. Задания для самостоятельного решения 35
Список литературы 38
Введение
Теория графов – это математический аппарат для формализации (моделирования) реальных задач по исследованию свойств конечных множеств с заданными отношениями между их элементами. В их числе задачи из области администрирования сетей, информационных потоков, планирования, проектирования и управления различными системами.
Задачи на графах удобно переводить на языки программирования, то есть решать с использованием современной вычислительной техники.
Умение решать задачи на графах позволит будущему специалисту приобрести опыт разработки технологий и методов теории операций для решения задач при научных исследованиях и проектно-конструкторской деятельности
В данном практикуме рассмотрены основные типы задач на графах, подходы и методы их решения, конкретные примеры.
Цель раздела «Теория графов» состоит в формировании у студентов умений и навыков, необходимых при исследовании различных систем и проектировании технических объектов.
Для достижения указанной цели решаются следующие задачи:
- формирование знаний методов и алгоритмов эффективного решения задач дискретной оптимизации;
- формирование умений и навыков использования изученных методов для решения типовых задач математического моделирования и оценки пределов применимости полученных результатов.
1. Краткий перечень основных понятий теории графов
1.1. Общие понятия
Графы помогают описывать и исследовать различные системы объектов и их связи. Например, в графе, изображенном на рис. 1, точки (вершины графа) можно интерпретировать как города, а линии, соединяющие вершины (ребра), как дороги, соединяющие эти города.
Рис. 1.
Формальное определение графа таково [1-8]. Графом Г=(V,X) называется пара множеств: V – множество, элементы которого называются вершинами, X – множество неупорядоченных пар вершин, называемых ребрами. Если v, w V, x=(v,w)X, то говорят, что ребро x соединяет вершины v и w или x инцидентно v и w. Таким образом, {v,w} – обозначение ребра. Если Х представляет собой упорядоченные пары (т. Е. X – подмножество декартова произведения V×V), то граф называется ориентированным, а пары {v,w} называют дугами. Если множеству X принадлежат пары v=w, то такие ребра (v,v) называют петлями. Существование одинаковых пар {v,w} соответствует наличию параллельных или кратных ребер (дуг), а кратностью ребер называют количество таких одинаковых пар.
Например, кратность ребра {v1, v2} в графе, изображенном на рис. 2, равна двум, кратность ребра {v3, v4} − трем.
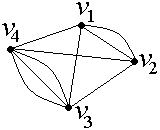
Рис.2.
Псевдограф − граф, в котором есть петли и/или кратные ребра.
Мультиграф − псевдограф без петель.
Заметим, что графом также называют мультиграф, в котором ни одна пара не встречается более одного раза.
Итак, используемые далее обозначения:
V – множество вершин;
X – множество ребер или дуг;
v (или vi)– вершина или номер вершины;
G, G0 – неориентированный граф;
D, D0 – ориентированный;
{v,w} − ребра неориентированного графа;
{v,v} – обозначение петли;
(v,w) − дуги в ориентированном графе;
v,w – вершины, x,y,z – дуги и ребра;
n(G), n(D) количество вершин графа;
m(G) – количество ребер, m(D) – количество дуг.
Примеры
1) Ориентированный граф D=(V, X), V={v1, v2, v3, v4},
X={x1=(v1,v2), x2=(v1,v2), x3=(v2,v2), x4=(v2,v3)}.

Рис. 3.
2) Неориентированный граф, изображенный на рис. 4:
G=(V, X), V={v1, v2, v3, v4, v5},
X={x1={v1,v2}, x2={v2,v3}, x3={v2,v4}, x4={v3,v4}}.
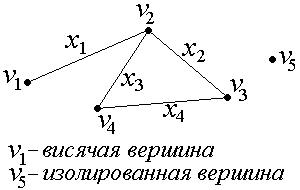
Рис. 4.