

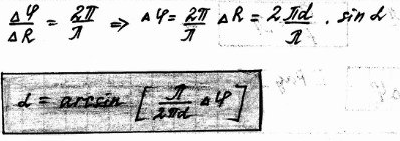
9. Методы измерения углов. Фазовый метод.
Основан на измерении разности фаз сигналов, принятых 2мя разнесенными антеннами. Измерение угловых координат основано на определении угла прихода радиоволн, излучённых или отражённых объектом. Для этого используют радиопеленгаторы.
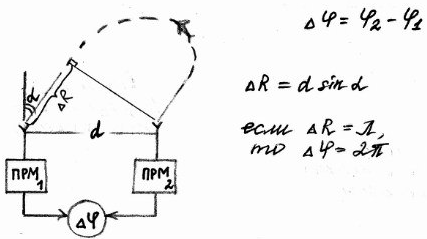
+: высокая точность, отсутствует неоднозначность.
-: усложнение аппаратуры.
10. Методы измерения углов. Амплитудный метод.
Амплитуда сигнала не зависит от направления, откуда пришел сигнал. Искусственность создается за счет направленных свойств антенн (описывается с помощью диаграммы направленности антенны). Формы диаграммы направленности зависят от конструкции антенны. Амплитудный метод основан на использовании направленных свойств антенны, при этом за направление на цель принимается направление антенны в момент выполнения некоторого условия. В зависимости от этого условия различают 3 вида методов: max-ма,min-ма, метод сравнения (разносигнальный метод).
Метод максимума(а)
 отсчитывается
по углу поворота диаграммы направленности
антенны (ДНА) в момент максимума
отсчитывается
по углу поворота диаграммы направленности
антенны (ДНА) в момент максимума
напряжения отраженного сигнала на выходе приемника, когда максимум главного лепестка ДНА
совпадает с направлением на источник излучения.
Достоинства такого метода: простота технической реализации; получение наибольшего отношения
сигнал/шум в момент отсчёта пеленга. Недостатки метода: низкая пеленгационная чувствительность,
низкая точность пеленгации
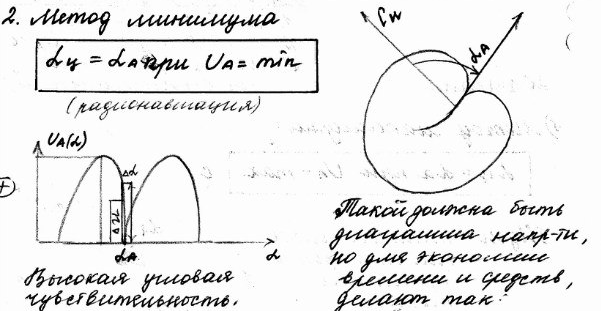
Метод минимума(б)
При пеленговании по методу минимума используется двух лепестковая диаграмма направленности
антенны. Пеленг при этом определяется по минимальному принимаемому сигналу от источника
излучения.Крутизна изменения сигнала здесь выше, но наличие шумов приводит к появлению зоны
неопределенности, т.е. сигнал от источника излучения исчезнет в шумах раньше, чем диаграммы
направленности своим минимумом будет направлено на источник излучения, одновременно в момент.
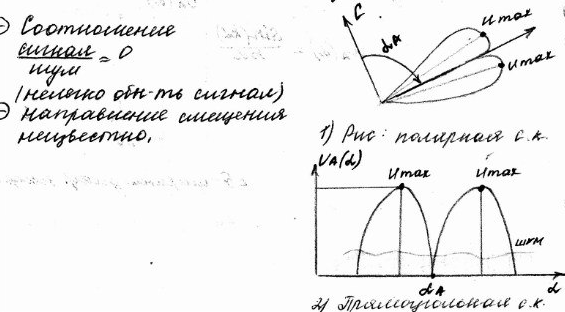
Равносигнальный метод(в)

Определение угловых координат равносигнальным методом основано на сравнении амплитуд сигналов,
полученных от одного и того же источника излучения двумя антеннами (или двумя элементами одной
антенны), ДНА которых пересекаются в пространстве, образуя равносигнальное направление.
+: обеспечивает высокую точность измерения и дает сведения о стороне отклонения цели; возможность
определить направление ухода (смещения) сигнала; довольно высокая чувствительность; высокое отношение
сигнал-шум.
Однако при использовании этого метода можно измерять азимут (или угол места) только одной цели.
11.Методы навигационных измерений. Счисление пути.
Задача: определение места ВС в некоторой системе координат. В радионавигации различают 3 метода определения МП: метод счисления пути, позиционный метод, образно-сравнительный (корреляционный).
Метод счисления пути: данный метод основан на измерении полного вектора скорости V ЛА относительно поверхности Земли. В качестве измерителя скорости может использоваться инерциальный измеритель скорости (ИИС) или многолучевой доплеровский измеритель скорости угла сноса (ДИСС)- определяет 3 проекции вектора скорости. Доплеровский измеритель определяет направление вектора V,относительно продольной оси ЛА, для направления относительно земной поверхности необходимо знать курс ВС, при известном курсе могут быть получены составляющие скорости Vs и Vz ,интегрирование которых, дает составляющие пройденного пути S и Z. ( Если в начальный момент времени t○ объект находится в точке пространства c радиус-вектором r○ относительно некоторой СК, то в момент времени t его текущее положение будет соответствовать радиус-вектору r(t)=r○(t)+∫V(t) dt до интегрирования (в методичке), S(t)=S○+∫Wsdt и Z(t)=Z○+∫Wzdt (S○ и Z○ начальные координаты ,∫Wsdt и ∫Wzdt прощение координат) Достоинством данного метода является простота. Недостатком–накопление ошибок со временем (для уменьшения погрешности-необходимо обнуление интегратора (коррекция счисленных координат))

1 2.Позиционный
метод.Для
определения местоположения объекта
на плоскости надо найти две пересекающиеся
линии положения. Точка пересечении
этих линий даст искомое местоположение.
Такой метод местоопределения называется
позиционным. В зависимости от видов
используемых линий положения различают
следующие позиционные методы: −
пеленгационный, при котором местоположение
объекта определяется как точка
пересечения двух прямых (рис. 2.3, а); −
дальномерный, при котором местоположение
объекта – точка пересечения двух
окружностей (рис. 2.3, б); −
разностно-дальномерный, при котором
местоположение объекта – точка
пересечения двух гипербол (рис. 2.3, в);
2.Позиционный
метод.Для
определения местоположения объекта
на плоскости надо найти две пересекающиеся
линии положения. Точка пересечении
этих линий даст искомое местоположение.
Такой метод местоопределения называется
позиционным. В зависимости от видов
используемых линий положения различают
следующие позиционные методы: −
пеленгационный, при котором местоположение
объекта определяется как точка
пересечения двух прямых (рис. 2.3, а); −
дальномерный, при котором местоположение
объекта – точка пересечения двух
окружностей (рис. 2.3, б); −
разностно-дальномерный, при котором
местоположение объекта – точка
пересечения двух гипербол (рис. 2.3, в);
− суммарно-дальномерный, при котором местоположение объекта – точка пересечения двух
объектов (рис. 2.3, г); − дальномерно-пеленгационный, при котором местоположение
объекта – точка пересечения прямой с окружностью (рис. 2.3, д). пеленгационный разностно-
дальномерный методы широко применяют в радионавигации для определения собственного
положения подвижного объекта относительно радиомаяков (РПдУ), устанавливаемых в РНТ.
Эти методы используют также в радиолокации – в пассивных РЛС. Дальномерный метод
применяют в радионавигации. Кроме того, дальномерный, а также суммарно-дальномерный методы
используют в радиолокации – в активных РЛС. Дальномерно-пеленгационный метод – основной в
однопозиционной радиолокации, так как он единственный из рассмотренных методов позволяет
определить местоположение объекта из одной точки. При местоопределении объекта в пространстве
постоянному значению каждой из перечисленных геометрических величин соответствует
поверхность возможных местоположений объекта, которую называют поверхностью положения. Так, постоянному значению расстояния от фиксированной точки до искомой соответствует поверхность положения в виде сферы. При постоянном начении суммы от искомой точки до фиксированных поверхностью положения является эллипсоид. При постоянном значении в горизонтальной плоскости искомой точки из фиксированной поверхностью положения будет вертикальная плоскость, проходящая через эти точки.
Пересечение двух поверхностей положения даёт линию положения в пространстве. Точка пересечения линии положения и третьей поверхности определяет местоположение объекта в пространстве. Если, например, использовать дальномерно-пеленгационный метод, то местоположение объекта даёт точка пересечения прямой со сферой. В этом случае для однозначного определения направления на объект необходимо осуществить пеленгацию в двух пересекающихся плоскостях, как правило – горизонтальной и вертикальной (рис. 2.3, е). Угол α между северным направлением географического меридиана и проекцией направления на объект на горизонтальную плоскость называется азимутом. Угол β между направлением на объект и горизонтальной плоскостью называется углом места. Расстояние R от радиолокатора до объекта называется наклонной дальностью. Как видим, задача местоопределения объекта в пространстве дальномерно-пеленгационным методом сводится к измерению трёх координат: наклонной дальности, азимута
и угла места.