

1.2 Гидростатические и гидродинамические опоры и направляющие
Когда в процессе работы смазка полностью разделяет трущиеся поверхности, то такое трение называется жидкостное. При использовании жидкостной смазки в опорах скольжения зависимости различают гидродинамический и гидростатический способы смазывания.
1.2.1 Гидродинамические подшипники
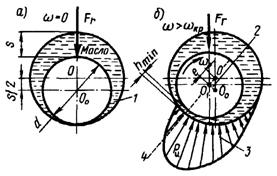
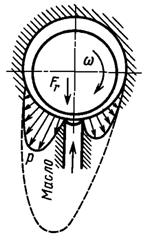
Гидродинамическое смазывание реализуется в процессе вращения цапфы в подшипнике после достижения определённой (критической) скорости вращения (рис. 1.22). Первоначально цапфа неподвижного вала лежит на поверхности подшипника (рис. 1.22 а), и потому начальный период вращения вала характеризуется режимом граничного трения. По мере увеличения угловой скорости вала частицы смазочного масла втягиваются в клиновой зазор между поверхностями цапфы и подшипника. Давление масла в этом зазоре повышается и при достижении критической скорости вращения вала, цапфа всплывает, т.е. происходит полное разделение трущихся поверхностей.
|
Рис. 1.22 Гидродинамическая смазка подшипника скольжения |
Недостатки гидродинамических опор:
– нестабильность положения оси вала при изменении скорости вращения;
– повышенный износ в момент пуска и остановки;
– сложность конструкции, создание систем для подкачки масла и удерживание его в опоре (герметизация);
– сложность изготовления, монтажа, эксплуатации.
1.2.2 Гидростатические подшипники
Принцип действия гидростатического подшипника (рис. 1.23) основан на том, что при прокачивании масла под давлением от источника питания (наноса) через зазоры между цапфой вала и подшипником, в зазоре образуется несущий
|
Рис. 1.23 Гидростатическая смазка подшипника скольжения |
|
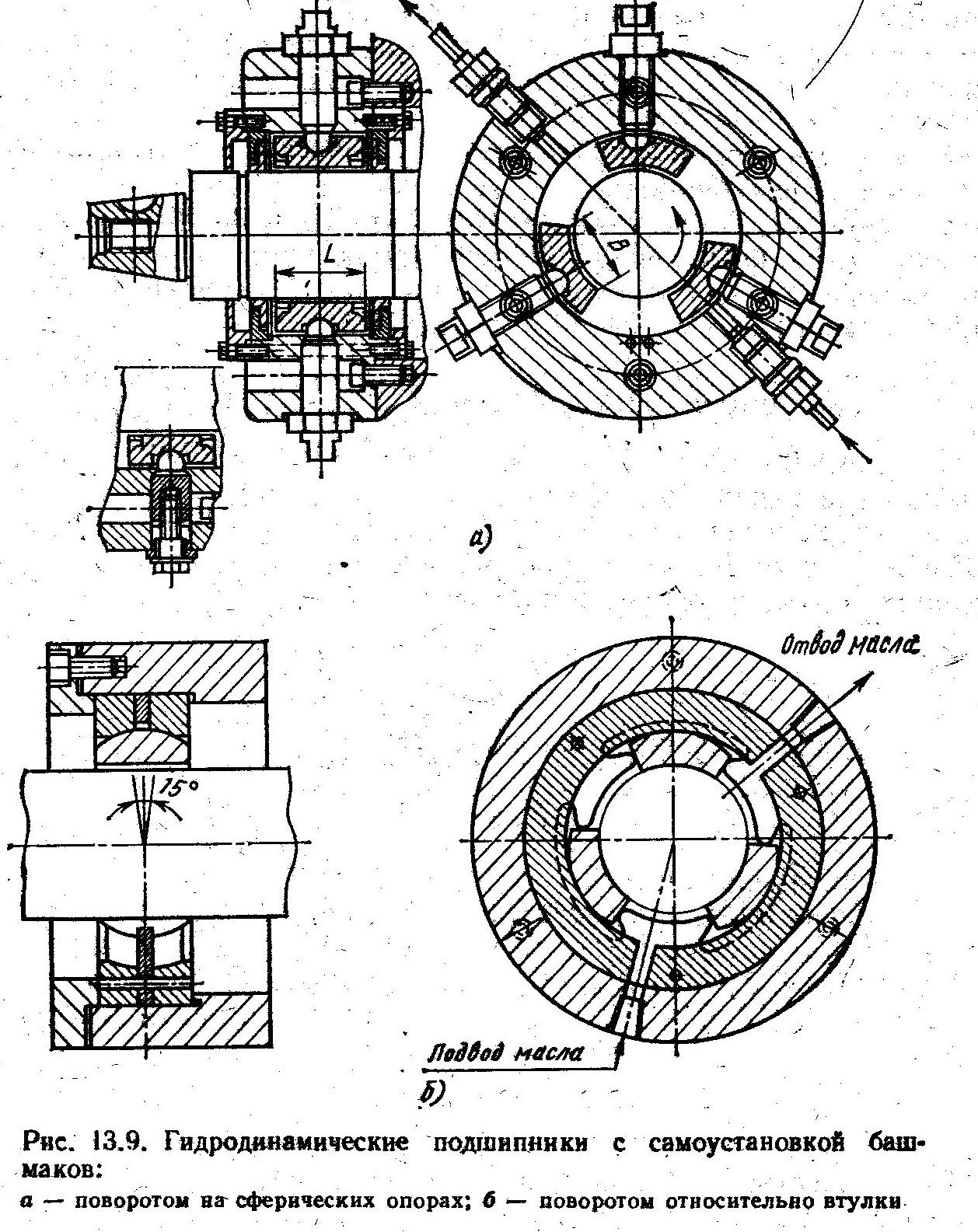
Рис. 1.24 Гидродинамический подшипник |
Достоинства гидростатических опор:
обеспечивают высокую точность вращения,
обладают высокой демпфирующей способностью, что повышает виброустойчивость направляющего узла,
долговечны, отсутствие износа рабочих поверхностей;
высокая плавность хода,
высокая нагрузочная способность при любой частоте вращения вала;
возможно использование в системах адаптивного управления, в качестве датчиков силы, приводов микроперемещений и д.р.
Недостатки:
– сложность конструкции, создание систем для подкачки масла и удерживание его в опоре;
– ограниченный температурный диапазон работы (предварительный разогрев или охлаждение смазки),
– требование герметизации.
Этих недостатков лишены опоры и направляющие с газовой смазкой.
По конструкции направляющие с жидкостным трением могут быть: цилиндрические, призматические, профильные.