

Недостатки
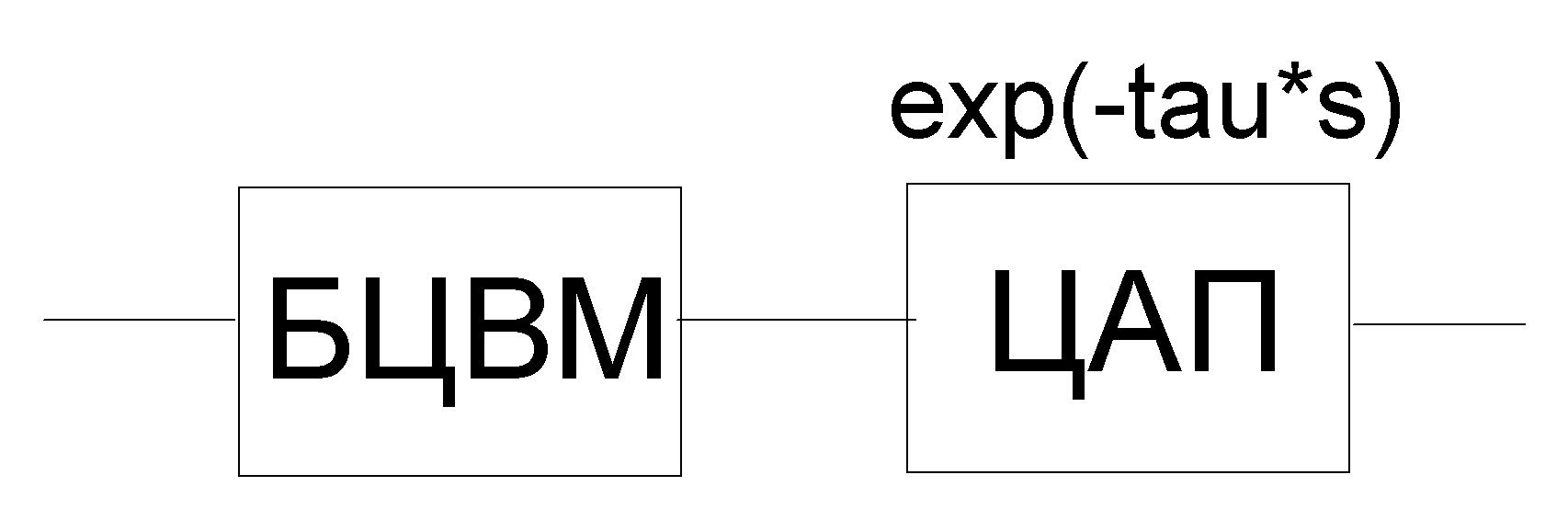
ЦАП является экстраполятором нулевого порядка, из-за чего в системе наблюдается чистое запаздывание – влияние на устойчивость.
В
расчетах устойчивости следует принимать
![]()
На
обработку информации в самой БЦВМ
затрачивается время
![]()
![]() -
фазовый сдвиг
-
фазовый сдвиг
![]() -потери
фазы в системе, обусловленные дискретностью.
-потери
фазы в системе, обусловленные дискретностью.
Вторая неприятность в БЦВС – стробоскопические эффекты.(наложение частот fn Найквиста и реальной fpeal).
Для устранения этих проблем применяются активная и пассивная самонастройки.
Кх
– произвольный параметр автопилота.
![]()
![]()
![]() -номер
канала (пр.-10Гц, 40Гц, 80Гц)
-номер
канала (пр.-10Гц, 40Гц, 80Гц)
![]() -
переменные неограниченные добавки.
-
переменные неограниченные добавки.
![]()
![]()
![]()
![]()
![]()
![]() высота,
высота,
![]() параметр.
параметр.
Кх0и Nx скачкообразно меняются по логическим условиям при переходе от одного параметра к другому.
Пассивная самоностройка:
![]()

Нужно учитывать затраты времени на вычисления в БЦВ
Билет №17
1. Управление разворотом ла без просадки по высоте полета.

Координированный разворот
Z – поперечная (боковая) аэродинамическая сила.
![]() ;
;
![]() .
(*)
.
(*)
Правильным разворотом называется координированный разворот с нулевым углом скольжения без просадки по высоте.
Если
![]() ,
то разворот координированный. Если
,
то разворот координированный. Если
![]() и
и
![]() ,
то разворот правильный.
,
то разворот правильный.
При правильном
развороте допустимый угол крена
определяется ограничением на допустимую
перегрузку
![]() .
.
В общем случае разворот бывает неправильным. Легко видеть, что
![]() .
.
Если управление ведется по перегрузкам, то условия (*) обычно бывает достаточно. Необходимое условие потери высоты может быть представлено и в других эквивалентных формулах.
![]() – произвольный
коэффициент поперечной силы по углу
атаки,
– произвольный
коэффициент поперечной силы по углу
атаки,
![]() – статически
устойчивый ЛА.
– статически
устойчивый ЛА.
Степень статической
устойчивости
![]() (разбег между ц.д. ц.м.). Ц.д. должен быть
за ц.м.
(разбег между ц.д. ц.м.). Ц.д. должен быть
за ц.м.
![]() (% САХ).
(% САХ).
Идеальный случай если 2-4% САХ.
“Нейтральный ЛА”

![]() .
.
Если
![]() ,
то ЛА статически устойчив.
,
то ЛА статически устойчив.


 .
.
![]() ,
,
![]() ,
,
![]() .
.
Если нам доступно
измерение
![]() ,
то полученному выражению можно придать
следующую форму
,
то полученному выражению можно придать
следующую форму
 ,
,
 ,
,
![]() в горизонтальном
полете
в горизонтальном
полете
![]() ,
,

![]()
![]() ,
,
 ,
,
 ,
,
![]() ,
,
![]() ;
;
![]() .
.
Если ЛА статистически устойчив по крену, то не требуется стабилизация
![]() ,
,
где
![]() – произвольная матрица.
– произвольная матрица.
2. Рекомендуемый порядок синтеза алгоритмов стабилизации в каналах рыскания и крена.
Порядок синтеза
1) Начинается с синтеза РП.
Современный привод синтезируется по критерию максимального быстродействия (близость к идеальному), обычно с ЖОС.
τрм = 12 мс
крт = 60 1/с (под добротностью СС понимается произведение коэффициентов усиления в замкнутом контуре)
крт = кУрт крм кос
Применительно к замкнутому контуру
 .
.
Допуск на Kрт порядка 30%.
При замыкании контура РП надо следить, чтобы подъем амплитуды с учетом допусков на коэффициент передачи (эта колебательность приходится на диапазон собственных частот фюзеляжа ЛА) был небольшим.

2) Синтез контура стабилизации крена при упрощенном описании моделей управления, но без упрощений запаздываний, вносимых РП и цифровой вычислительной техникой.
Синтез производится посредством корневого метода.
3) Синтез контура курса уже с учетом принятых решений по контуру крена.
4) Синтез контура угловой стабилизации по тангажу.
Встаёт проблема многомерности, т.к. параметров много.
Рассматривают
ksγ = 0
kn kn (с точкой) ==> 0
kz kz (c точкой) ==> 0
пренебрегаем влиянием ЦМ на параметры угловой стабилизации.