

Билет №11
1. Особенности врд как объектов регулирования и элементов су.
Воздушно-реактивный двигатель:
- воздухозаборник
- компрессор
- камера сгорания
- сопловой аппарат
Пульсирующий ВРД – компрессор отсутствует.
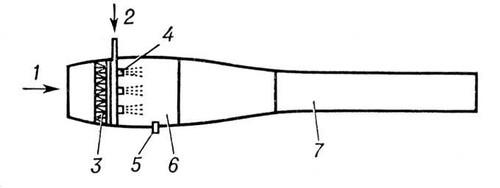
Схема пульсирующего воздушно-реактивного двигателя (ПуВРД): 1 — воздух; 2 — горючее; 3 — клапанная решётка; 4 — форсунки; 5 — свеча; 6 — камера сгорания; 7 — выходное (реактивное) сопло.
Прямоточный ВРД – компрессор и воздухозаборник совмещены.
Недостатки пульсирующего ВРД:
- Моторесурс ограничен стойкостью клапанов
- Дозвуковая скорость
- Низкий КПД из-за сопла
Турбореактивные двигатели:
- высокий КПД
- широкий диапазон скоростей (до М ≈ 3)
- самостоятельный взлет ЛА
- область применения велика
ВЗ
компрессор
турбина
Сопловой аппарат
КС
ФК
«1»
«2»
«3»
ВЗ – воздухозаборник
ФК – форсажная камера
КС – камера сгорания
Управляемые переменные:
n – частота вращения;
Tз* – температура на лопатках
1% n, Tз* - прирост на 5 – 10% удельной тяги,
на 7 – 12% снижения надежности.
Прямоточные двигатели:
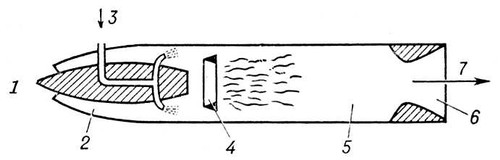
Схема прямоточного воздушно-реактивного двигателя (ПВРД): 1 — воздух; 2 — диффузор; 3 — впрыск горючего; 4 — стабилизатор пламени; 5 — камера сгорания; 6 — сопло; 7 — истечение газов.
- нет компрессора и турбины
- работают в условиях первоначального разгона
- М ≈ 7 и выше.
2. Характеристика систем автономного управления, телеуправления и самонаведения.
Теленаведение – способ управления, при котором один из элементов системы управления находится вне ЛА и связан с ним каналом связи.
Телеуправляемые ЛА – это ЛА, управление которыми осуществляется на расстоянии с помощью аппаратуры, расположенной на командном пункте управления.
Системы телеуправления ЛА делятся на 2 группы:
командные
системы управления по лучу (системы теленаведения)
В командных системах телеуправления сигнал управления формируется на командном пункте управления и по линии связи передается на борт ЛА.
Системы телеуправления первого вида – координаты цели измеряются устройствами, размещенными на пункте управления.
Системы телеуправления второго вида – координаты цели измеряются бортовым координатором ЛА с последующей их передачей на пункт управления.
Выработка команд управления как в первом, так и во втором случае осуществляется наземным пунктом управления.
В системах телеуправления по лучу сигналы управления вырабатываются на борту ЛА по измеряемым отклонениям ЛА от оси луча радиолокатора (или оптического, или теплового), который перемещается в пространстве в соответствии с принятым методом наведения.
Наведение ЛА на цель происходит по отклонению реальной траектории его движения от кинематической траектории, определяемой методом наведения. Мера отклонения реальной траектории от кинематической называется параметром рассогласования (параметром управления). Система наведения измеряет параметр рассогласования и вырабатывает команды управления полетом ЛА.
Метод 3-х точек.
Недостаток: траектория – кривая; кривизна увеличивается по мере подлета к цели.
При следовании по траектории высоки потребные перегрузки. Кинематическая перегрузка возрастает при приближении к цели, даже если цель движется прямолинейно.
2 составляющие промаха:
- динамическая
- кинематическая
(при
![]() =>
сход с кинематической траектории).
=>
сход с кинематической траектории).
Метод половинного спрямления.
(результаты по методу 3-х точек + результаты стрельбы в упрежденную точку)/2
Метод стрельбы в упрежденную точку встречи оптимален по требованию кинематической перегрузки.
Самонаведение – такой метод управления, при котором на борту ЛА измеряются параметры движения цели и формируются команды управления, обеспечивающие наведение ЛА на цель.
В зависимости от места расположения первичного источника электромагнитного излучения различают активные, полуактивные, пассивные и комбинированные системы самонаведения (ССН).
Координаторы:
- радиолокационные
- тепловые
- оптические
- телевизионные
Основной информацией, используемой в системах СН, является информация о взаимном положении ЛА и цели. Это положение определяется направлением в пространстве линии визирования цели.
Метод стабилизации угловой скорости линии визирования.
Методы СН:
- метод погони
- метод погони с упреждением
- метод параллельного сближения
- метод пропорциональной навигации
- модифицированный метод пропорциональной навигации
Автономное управление – вся информация заранее заносится в бортовую систему управления. Системы, использующие для выработки сигнала управления информацию собственной инерциальной навигационную систему, без использования средств внешней коррекции.
Можно использовать два принципа:
1) можно рассчитать параметры заранее и записать в БАСУ
2) непрерывное определение параметров в полете.
Достоинство – высокая скрытность и помехозащищенность.
Недостаток – низкая точность, сложность построения, высокая стоимость.