2. Рулевой привод как объект регулирования и элемент су.
Рулевой привод – усилитель, рулевая машинка и привод.
Варианты ОС
Wос = Кос – жесткая ос
Wос = Тоср+1 – гибкая ос
Wос
=
![]() - непонятно какая
(вероятнее всего имеется ввиду диф. с
замедлением)
- непонятно какая
(вероятнее всего имеется ввиду диф. с
замедлением)
Сигналы с чувствительных элементов (ДУ, ДУС, ДУУ, ДП), пропорциональные параметрам движения ЛА, преобразуются и суммируются в вычислительном устройстве (ВУ), затем усиливаются в усилителе мощности (У) и поступают в качестве командного сигнала на рулевую машинку (РМ), которая отклоняет орган управления ЛА (руль). Обратная связь с выхода рулевой машинки на вход вычислительного устройства применяется в АП для получения желаемого закона управления и улучшения динамических характеристик привода (рулевой машинки). Механизм согласования (МС) служит для автоматической подготовки АП к включению его силовой части.
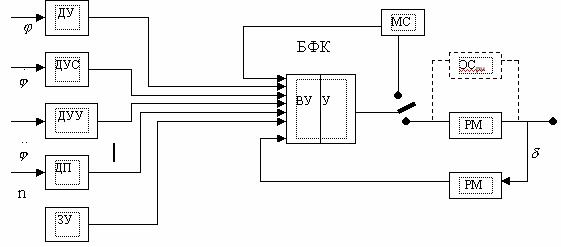
Рис. Типовая функциональная схема АП: ДУ – датчик угла; ДУС – датчик угловой скорости; ДУУ – датчик углового ускорения; ДП – датчик перегрузок (датчик линейного ускорения); ЗУ – задающее устройство (задатчик); БФК – блок формирования команд; ВУ – вычислительное устройство; У – усилитель; МС – механизм согласования; РМ – рулевая машинка; ОС – устройство обратной связи; ОСрм – устройство обратной связи рулевой машинки.
Задающее устройство
(ЗУ) служит для введения в АП заданного
значения регулируемого параметра
![]() .
В качестве ЗУ могут быть использованы
ручка задатчика на пульте АП, программный
механизм или блок связи с системой
наведения.
.
В качестве ЗУ могут быть использованы
ручка задатчика на пульте АП, программный
механизм или блок связи с системой
наведения.
В АП могут отсутствовать такие элементы, как ДУС, ДУУ, ДП, МС; обратная связь может охватывать только РМ.
Системы стабилизации беспилотных ЛА по принципу действия не отличаются от самолетных АП, хотя в конструктивном отношении они более просты.
Каналы стабилизации рыскания и тангажа осимметричных объектов по своей схеме не отличаются друг от друга. Все три канала стабилизации таких ЛА обычно независимы и построены по прямой схеме.
В современных ЛА для улучшения качества процесса управления между отдельными каналами АП существуют перекрестные связи. Говорят, что АП построен по перекрестной схеме. С помощью этих связей сигнал, пропорциональный углу рыскания, подается на привод элеронов, а сигнал, пропорциональный углу крена, - на приводы руля высоты и руля направления. В этом случае принято называть отдельные каналы АП не по виду регулируемого параметра, а по виду органа управления, обслуживаемого данным каналом. Таким образом, вместо канала крена называют канал элеронов, вместо канала рыскания – канал руля направления.
В качестве электрического рулевого привода может быть использован обычный электрический двигатель, реверсивный по цепи якоря. Это электрический двигатель непостоянного вращения. Также может быть использован двигатель постоянного вращения с подключением руля через муфты.
Приведем электрокинематическую схему такого привода:
ЭММ — электромеханическая муфта.
I — управляющий ток в обмотках муфты.
Когда поступает управляющий сигнал, муфта притягивает шестеренку передавая вращение на руль. Вращение руля происходит в обратную сторону.
Когда не требуются большие крутящие моменты, используются электрические рулевые машинки.
Стремятся сделать систему с ШИМ. Тогда система по мгновенному сигналу ведет себя как релейная, а по среднему сигналу как линейная.
Исследование динамики рулевого привода.
Из всех элементов системы угловой стабилизации (СУС), наибольшей инерционностью обладает рулевой привод (РП), что позволяет в качестве инерционности системы стабилизации рассматривать инерционность рулевого привода.
Рулевой привод – следящая система с жесткой обратной связью
Основным исполнительным элементом рулевого привода является рулевая машинка. Рулевые машинки бывают нескольких типов:
- Электрическая (электродвигатель);
- Электропневматическая;
- Электрогидравлическая;
В системах управления ЛА чаще всего используются электрогидравлические рулевые машинки, связано это, прежде всего, с необходимостью развивать большие крутящие моменты и требованиями по быстродействию. Типовая схема электрогидравлического рулевого привода представлена на рисунке 3.
|
Рис. 3 – Схема электрогидравлического рулевого привода |
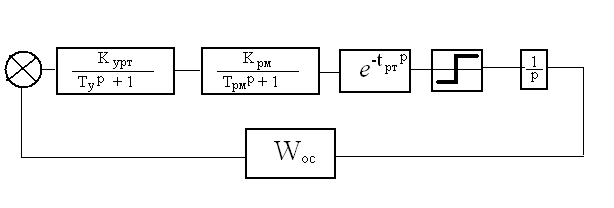
Рулевой привод включает в себя: усилитель рулевого привода, рулевую машинку, цепь обратной связи.
|
Рис. 4 – Функциональная схема рулевого привода |

Добротность РП – произведение коэффициентов усиления в замкнутом контуре.
|
(4.1) |
где ![]() – коэффициент усиления рулевого тракта;
– коэффициент усиления рулевого тракта;
![]() – коэффициент
усиления (передачи) рулевой машинки;
– коэффициент
усиления (передачи) рулевой машинки;
![]() – коэффициент
усиления в цепи обратной связи;
– коэффициент
усиления в цепи обратной связи;
Единичная обратная связь в контуре рулевого привода предназначена для обеспечения заданных статических и динамических характеристик рулевого привода, как следящей системы. В замкнутой цепи рулевого привода могут быть использованы различные виды обратной связи (ОС)
«жесткая»
(позиционная) обратная связь –
![]() ;
;
«гибкая»
(скоростная) обратная связь –
![]() ;
;
изодромная
обратная связь –
![]() ;
;
Использование того или иного вида обратной связи, является изолированным вопросом, касающимся только рулевого привода. Напротив, выбранный вид обратной связи зависит часто от общей структуры реализуемого закона управления (стабилизации). Следовательно, вид обратной связи РП и управляющего сигнала на входе РП взаимосвязаны в том смысле, что они определяют общую структуру алгоритма стабилизации.
Для
определенного класса объектов управления
было установлено, что требуемое
быстродействие переходных процессов
обеспечивается при
![]() .
Быстродействие процессов в РП зависит
от суммарного запаздывания:
.
Быстродействие процессов в РП зависит
от суммарного запаздывания:
|
(4.2) |
Звено
транспортного запаздывания
![]() ,
может быть аппроксимировано звеном
вида:
,
может быть аппроксимировано звеном
вида:
|
(1.20) |
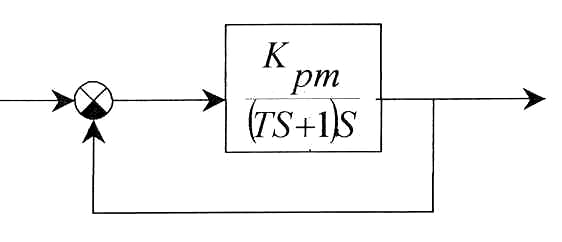
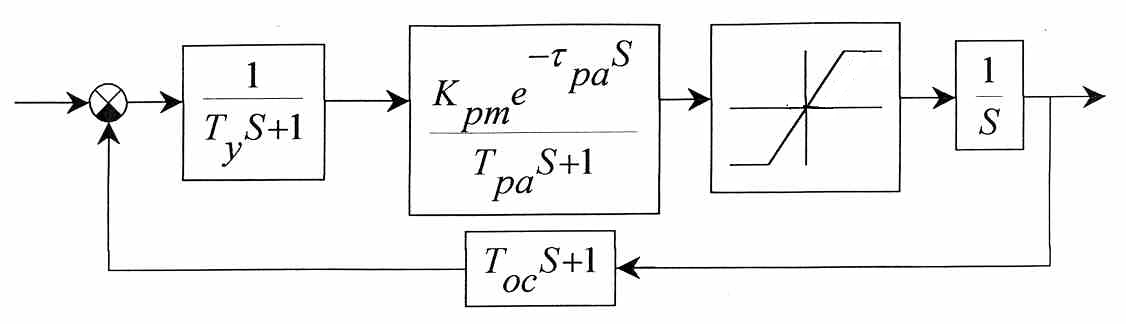
При исследовании динамики систем управления часто используют упрощенные математические модели исполнительных механизмов. Так, математическая модель рулевого привода может быть аппроксимирована следующими более простыми моделями (Рис.5, Рис 6.)
|
Рис. 4 – математическая модель рулевого привода с гибкой ОС |
|
Рис. 5– упрощенная модель рулевого привода |
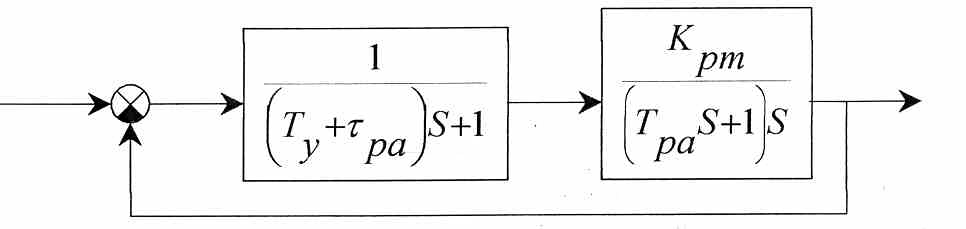
|
Рис. 6 – упрощенная модель рулевого привода |