

Билет №1.
Типовые законы управления рулями ла.
С помощью рулей ЛА обеспечивается управление перегрузкой и угловой стабилизацией.
![]() – сигнал, подаваемый
на РП (рулевые приводы):
– сигнал, подаваемый
на РП (рулевые приводы):
![]() – на элероны,
– на элероны,
![]() – на рули направления,
– на рули направления,
![]() – на рули высоты.
– на рули высоты.
Алгоритмы управления перегрузкой и угловой стабилизацией относятся к одному из двух классов.
1) В более простом случае (когда нет необходимости решать задачи дальней навигации – для ЛА воздушного боя: воздух – воздух, земля – воздух) применяются упрощенные законы управления, стабилизируются только угловая скорость и перегрузка:
![]() ,
,
![]() ,
,
![]() ,
,
т. е. угловая стабилизация осуществляется методом приведения к 0 угловой скорости вращения с коррекцией траектории полета установками поперечной перегрузки.
Положительным направлением отклонения любого управляющего органа считается то, которое ведет к устранению положительного отклонения регулируемой величины.

Для рулей высоты регулируемая величина – тангаж, для рулей направления – угловая скорость рыскания либо рыскание.
2) В общем случае (для ЛА, находящихся долгое время в атмосфере) законы управления выглядят следующим образом:
![]() ,
,
где
![]() обычно выбирается таким большим, что
не требует проверки влияния этого
слагаемого на устойчивость,
обычно выбирается таким большим, что
не требует проверки влияния этого
слагаемого на устойчивость,
![]() обычно равен 0,
обычно равен 0,
![]() – управляющая установка крена, слагаемое
– управляющая установка крена, слагаемое
![]() обеспечивает угловую стабилизацию,
слагаемое
обеспечивает угловую стабилизацию,
слагаемое
![]() обеспечивает демпфирование колебаний
в переходном процессе обработки
возмущений, слагаемое
обеспечивает демпфирование колебаний
в переходном процессе обработки
возмущений, слагаемое
![]() обеспечивает подавление статических
ошибок, вызванных производственной или
иной асимметрией ЛА;
обеспечивает подавление статических
ошибок, вызванных производственной или
иной асимметрией ЛА;
![]()
где H – текущая высота,
![]() –
–
![]() ,
,
![]() –
–
![]() разгружает СУ и снижает статические
ошибки,
разгружает СУ и снижает статические
ошибки,
![]() – управляющая установка тангажа,
слагаемое
– управляющая установка тангажа,
слагаемое
![]() обеспечивает угловую стабилизацию;
обеспечивает угловую стабилизацию;
![]() ,
,
где слагаемое![]() – измеритель перегрузки, слагаемое
– измеритель перегрузки, слагаемое
![]() – измеритель отклонений,
– измеритель отклонений,![]() – управляющая установка рыскания,
слагаемое
– управляющая установка рыскания,
слагаемое
![]() обеспечивает
угловую стабилизацию.
обеспечивает
угловую стабилизацию.
В формулу также могут быть добавлены слагаемые:
![]() – слагаемое дает
пренебрежение углом скольжения,
– слагаемое дает
пренебрежение углом скольжения,
![]() – слагаемое
добавляется к формуле, если существует
проблема со стабилизацией внешнего
контура.
– слагаемое
добавляется к формуле, если существует
проблема со стабилизацией внешнего
контура.
2.Особенности синтеза су полетом статически неустойчивого упругого ла
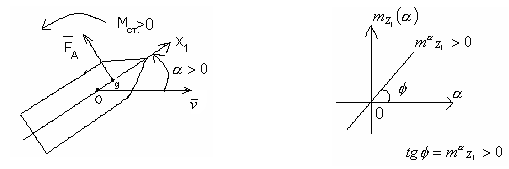
ЛА называется
статически неустойчивым, если при
появлении угла атаки
![]() не возникает стабилизирующий
аэродинамический момент, который
стремится уменьшить этот угол
по абсолютной величине, т.е. не возникает
момент отрицательного знака.
не возникает стабилизирующий
аэродинамический момент, который
стремится уменьшить этот угол
по абсолютной величине, т.е. не возникает
момент отрицательного знака.
![]() -
условие статической устойчивости.
-
условие статической устойчивости.
Конструктивно статическая устойчивость обеспечивается наличием хвостового оперения или созданием передней срывной зоны. Оперение смещает центр давления за центр тяжести.
Случай статически неустойчивого ЛА.
|
Рис. Статически неустойчивый ЛА |
Для стабилизации придают большую угловую скорость относительно собственной оси, создаются путем нарезов в стволе.
![]() 1/сек
1/сек
Баллистические ракеты на некоторых участках своей траектории проектируется как статически неустойчивые, чтобы они не опрокидывались и совершали правильный полет, существует система угловой стабилизации по углам крена, тангажа и рыскания.
Взято из моей лекции:
Способы нейтрализации, которые применяются:
- линейная фильтрация;
- нелинейная фильтрация;
- применение методов комплексирования;
- применение различных фильтров:
- фильтр пробка:
![]()
условия :
ξ1<0,3
ξ2>0,7
Разновидность заграждающего (режекторного) фильтра; представляет собой включаемый в электрическую цепь двухполюсник (обычно параллельный колебательный контур), сопротивление которого резко увеличивается в некоторой относительно узкой полосе частот, препятствует прохождению переменных токов в этой полосе частот и пропускает токи с частотами, лежащими за её пределами.
Обеспечивает отрицательный фазовый сдвиг:
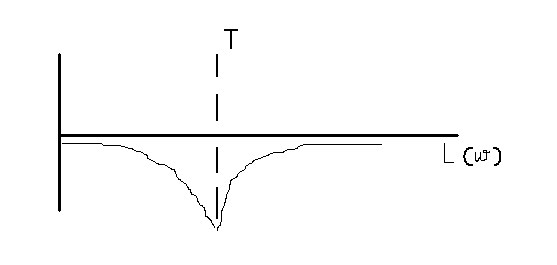
На частоте 20Гц обеспечивается максимальное подавление. Его минус, что давиться весь полезный сигнал.
Его АЧХ, ФЧХ
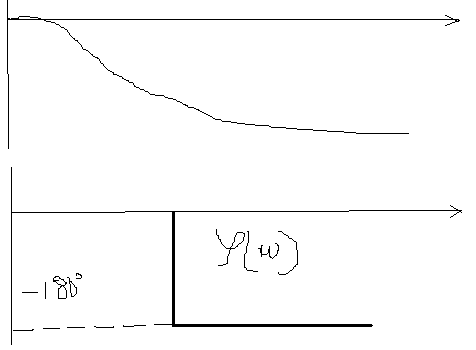
Способ улучшения: после применения данного фильтра делать положительный фазовый сдвиг для нейтрализации.
-
псевдолинейное звено
![]()
Y = x + f1(|x|) f2(z)
Z = f(x)~x (f и x с точками на бошках)
Обеспечивает максимальный выигрыш по фазе.
Создает запас устойчивости по фазе.
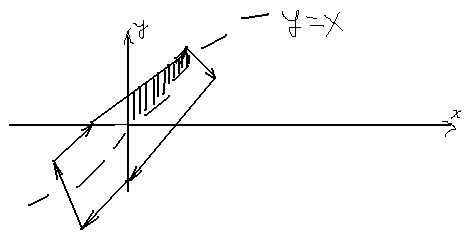
Создает запас устойчивости по фазе.
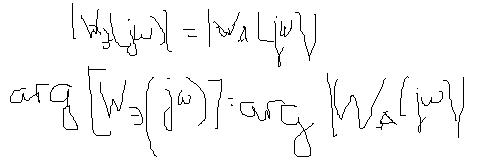
Мы можем менять и амплитуду и частоту отдельно
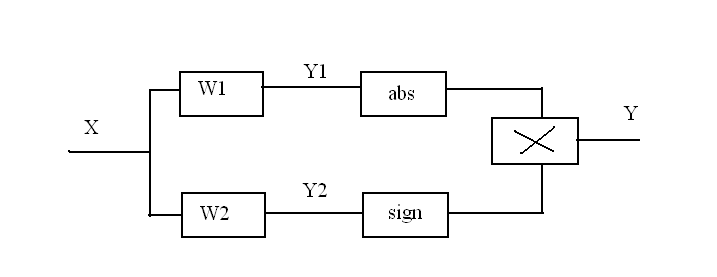
ЧХ: АХ пропорциональна Wa
ФХ пропорциональная Wbetta
If Wa=Wbetta, выход у
На плавных сигналах схема не работает.
Преобразуем уравнения (1) и (2), заменив в них символ дифференцирования на р.
Преобразование Лапласа уводит из временной области в комплексную. При символической записи мы остаёмся во временной области, не смотря на внешнее сходство. Итак.
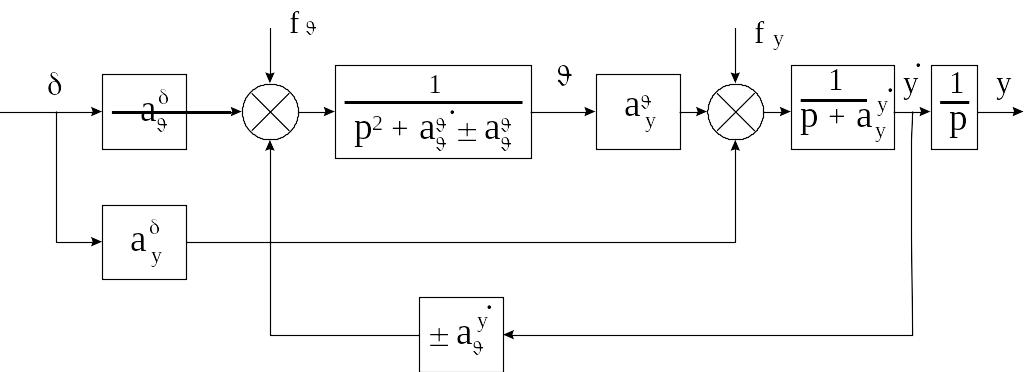
При выборе системы управления первая операция состоит в определении устойчивости собственного движения ЛА (неуправляемого).
Пусть компоновка ЛА статически устойчива,
тогда
![]() берётся с плюсом. Если же компоновка
статически неустойчива, тогда
берётся с плюсом. Если же компоновка
статически неустойчива, тогда
![]() с минусом, и звено будет неустойчивым,
но зато и
с минусом, и обратная связь станет
отрицательной, то есть будет способствовать
устойчивости. Но неустойчивость звена
сказывается сильнее, чем отрицательная
обратная связь. Таким образом, в любом
случае движение ЛА неустойчиво, и
требуется система управления.
с минусом, и звено будет неустойчивым,
но зато и
с минусом, и обратная связь станет
отрицательной, то есть будет способствовать
устойчивости. Но неустойчивость звена
сказывается сильнее, чем отрицательная
обратная связь. Таким образом, в любом
случае движение ЛА неустойчиво, и
требуется система управления.
Чем же можно пренебречь при приближённых исследованиях. Допустимые упрощения показаны на рис.

То есть угловое движение можно рассматривать без учёта движения центра масс, но наоборот нельзя.
![]() с угловыми параметрами
связаны интегральными зависимостями.
АЧХ интегрирующих звеньев падающие.
Это указывает на то, что движение центра
масс более низкочастотное, чем угловое
движение. Сейчас частоты управляемого
углового движения порядка 0,01Гц,
а частоты управляемого движения центра
масс на порядок меньше.
с угловыми параметрами
связаны интегральными зависимостями.
АЧХ интегрирующих звеньев падающие.
Это указывает на то, что движение центра
масс более низкочастотное, чем угловое
движение. Сейчас частоты управляемого
углового движения порядка 0,01Гц,
а частоты управляемого движения центра
масс на порядок меньше.