

6. Конструкция установок сзм (основные положения).
Схема установки
|
Рисунок: Схема установки. 1 - микроскоп, 2 - блок ЦАП и АЦП, 3 - блок управления шаговым двигателем, 4 - плата DSP, 5 - компьютеры (слева - сервер, справа - удаленный пользователь). |

Установка сканирующего зондового микроскопа состоит из нескольких функциональных блоков, изображенных на рис. 1.1. Это, во первых, сам микроскоп с пьезоманипулятором для управления зондом, преобразователем туннельного тока в напряжение и шаговым двигателем для подвода образца; блок аналого-цифровых и цифро-аналоговых преобразователей и высоковольтных усилителей; блок управления шаговым двигателем; плата с сигнальным процессором, рассчитывающим сигнал обратной связи; компьютер, собирающий информацию и обеспечивающий интерфейс с пользователем. Конструктивно блок ЦАПов и АЦП установлен в одном корпусе с блоком управления шаговым двигателем. Плата с сигнальным процессором (DSP - Digital Signal Processor) ADSP 2171 фирмы Analog Devices установлена в ISA слот
Принцип работы основывается на эффекте туннелирования. Если два проводящих электрода, один из которых плоскость, а другой –острие, разделить воздушным промежутком в несколько единиц или десятков ангстрем и создать между ними разность потенциалов, то через эту систему пойдет туннельный ток.
7. Возможности метода стм (рельеф поверхности, локальная работа выхода электронов).
Причина в уникальных свойствах, присущих этому методу: разрешающая способность до десятых долей ангстрема, не достижимая никакими другими способами, неразрушающий характер анализа, возможность работать как в вакуум, так и в различных средах, получение квазитрехмерного изображения рельефа. СТМ позволяет исследовать локальную работу выхода, идентифицировать атомные элементы на поверхности, их химические связи, получать картину распределения плотности электронных состояний не только с высоким пространственным разрешением, но и по энергиям, выделяя спектр свободных и заполненных состояний.
Области применения СТМ в настоящее время следующие:
-физика и химия поверхности на атомном уровне; здесь достигнуты впечатляющие результаты, например, прямое наблюдение реконструкции поверхности кремния;
-«нанометрия» - исследование с нанометровым разрешением шероховатости поверхности, процессов зародышеобразования при росте пленок, химического и ионного травления, осаждения ;
-«нанотехнология» - исследование и изготовление приборных структур в микроэлектронике;
-Исследование макромолекул, вирусов и иных биологических структур.
8. Возможности метода асм(рельеф поверхности, атомное разрешение).
Принцип действия атомного силового микроскопа (АСМ) основан на использовании сил атомных связей, действующих между атомами вещества. На малых расстояниях между двумя атомами (около одного ангстрема, 1 Ǻ = 10–8 см) действуют силы отталкивания, а на больших – силы притяжения. Совершенно аналогичные силы действуют и между любыми сближающимися телами. В сканирующем атомном силовом микроскопе такими телами служат исследуемая поверхность и скользящее над нею острие. Обычно в приборе используется алмазная игла, которая плавно скользит над поверхностью образца (как говорят, сканирует эту поверхность). При изменении силы F, действующей между поверхностью и острием, пружинка П, на которой оно закреплено, отклоняется, и такое отклонение регистрируется датчиком D. В качестве датчика в АСМ могут использоваться любые особо точные и чувствительные – прецизионные – измерители перемещений, например оптические, емкостные или туннельные датчики. На рисунке показан именно последний тип датчика, – фактически это такая же игла, какая применяется в сканирующем туннельном микроскопе. Величина отклонения упругого элемента (пружинки) несет информацию о высоте рельефа – топографии поверхности и, кроме того, об особенностях межатомных взаимодействий. Можно сказать, что в атомном силовом микроскопе сканирование исследуемого образца происходит по «поверхности постоянной силы», тогда как в СТМ – по поверхности постоянного туннельного тока. Принципы же прецизионного управления, основанного на обратной связи и улавливающего самые ничтожные изменения рельефа поверхности, в СТМ и АСМ практически одинаковы.
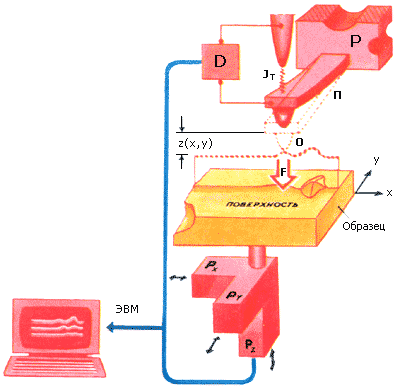
Рис. 2. Схема сканирующего атомного силового микроскопа
На рисунке изображена схема атомного силового микроскопа. О – острие (игла), П – пружина, на которой оно закреплено; P, Px, Py, Pz – пьезоэлектрические преобразователи. При этом Px и Py служат для сканирования образца под иглой, а Pz управляет расстоянием от острия до поверхности, D – туннельный датчик, который регистрирует отклонения пружинки с острием.
Атомный силовой микроскоп может использоваться для определения микрорельефа поверхности любых веществ, как проводящих, так и непроводящих, с его помощью можно наблюдать всевозможные несовершенства структуры, локализованные на изучаемых поверхностях, например, дислокации или заряженные дефекты, а также всяческие примеси. Кроме того, АСМ позволяет выявить границы различных блоков в кристалле, в частности доменов В последнее время с помощью атомного силового микроскопа физики стали интенсивно изучать биологические объекты, например молекулы ДНК и другие макромолекулы, главным образом для целей нарождающегося и, судя по всему, чрезвычайно перспективного направления – биомолекулярной технологии. Интересно, что АСМ позволяет решать не только прикладные задачи, но и глобальные проблемы фундаментальной физики. В частности, определив с его помощью поведение межатомных сил и константы взаимодействий между атомами поверхности и острия, можно сделать довольно точные заключения о существовании или отсутствии новых фундаментальных взаимодействий и даже о структуре физического вакуума.
Манипулятор АСМ и СТМ позволяет при габаритах в несколько сантиметров передвигать иглу с разрешением лучше 0,1 Ǻ. Если бы промышленный робот обладал подобной точностью перемещений при габаритах около метра, то иголкой, зажатой в манипуляторах, он мог бы нарисовать окружность диаметром в несколько нанометров.
Коэффициент температурного расширения большинства материалов около 10−6. При размерах манипулятора в несколько сантиметров изменение температуры на 0,01° приводит к перемещению иглы вследствие теплового дрейфа на 1 Ǻ.