

Полная и локальная производные вектора. Формула Бура.
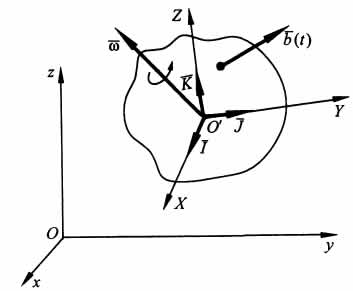
Рассмотрим изменение вектора b(t) по отношению к двум системам координат — подвижной O'XYZ и неподвижной Oxyz.
Абсолютной,
или полной,
производной вектора b по аргументу t
назьшается вектор ![]() определяющий
изменение вектоpa b(t) в неподвижной
системе Oxyz.
определяющий
изменение вектоpa b(t) в неподвижной
системе Oxyz.
Относительная,
или локальная,
производная ![]() определяет
измененине вектора b(t) в подвижной
системе O'XYZ.
определяет
измененине вектора b(t) в подвижной
системе O'XYZ.
Формула
Бура (получается
из зависимости между полной и локальной
производными):  .
.
Рассомтрим частные случаи.
1) угловая скорость = 0, то = ;
2)
вектор b не меняется в подвижной системе
отсчета (
=0),
то  ;
;
3) ![]() ,
т.е. вектор b все время параллелен вектору
угловой скорости (
,
т.е. вектор b все время параллелен вектору
угловой скорости (![]() ),
то
=
.
В частности, если
),
то
=
.
В частности, если ![]() ,
то
,
то ![]() ,
т.е. вектор угловой скорости изменяется
одинаково для подвижной и неподвижной
систем координат.
,
т.е. вектор угловой скорости изменяется
одинаково для подвижной и неподвижной
систем координат.
Дополнение:
Выведение формулы Бура:
Найдем
зависимость между полной и локальными
производными. Если воспользоваться
проекциями вектора b(t) на оси подвижной
системы O'XYZ, то можно записать:![]() ,
где I, J, К — орты, не изменяемые в этой
системе отсчета. Поэтому локальная
производная
,
где I, J, К — орты, не изменяемые в этой
системе отсчета. Поэтому локальная
производная  ,
а полная производная
с
учетом изменения также ортов I, J , К имеет
вид:
,
а полная производная
с
учетом изменения также ортов I, J , К имеет
вид:  .
В правой части уравнения первые три
слагаемых выражают локальную производную,
а производные от ортов I, J, K определяются
формулами Пуассона (
.
В правой части уравнения первые три
слагаемых выражают локальную производную,
а производные от ортов I, J, K определяются
формулами Пуассона (![]() ),
т.е.
),
т.е.  .
С учетом
получаем:
.
.
С учетом
получаем:
.
Скорости и ускорения точки при сложном движении.
Основные задачи кинематики сложного движения заключаются в установлении зависимостей между кинематическими характеристиками абсолютного и относительного движений точки (или тела) и характеристиками движения подвижной системы отсчета, то есть переносного движения. Для точки эти зависимости являются следующими: абсолютная скорость точки равна геометрической сумме относительной и переносной скоростей, то есть:
![]()
или
![]() .
.
Связь ускорений можно найти путём дифференцирования связи для скоростей, не забывая, что координатные векторы подвижной системы координат также могут зависеть от времени.
Положение
материального тела в условно неподвижной
и инерциальной системе задаётся здесь
вектором ![]() ,
а в неинерциальной системе —
вектором
,
а в неинерциальной системе —
вектором ![]() .
Положение начала координат второй
системы отсчета в первой системе отсчета
определяется вектором
.
Положение начала координат второй
системы отсчета в первой системе отсчета
определяется вектором ![]() . Угловая
скорость вращения
неинерциальной системы отсчета
относительно инерциальной задаётся
вектором
. Угловая
скорость вращения
неинерциальной системы отсчета
относительно инерциальной задаётся
вектором ![]() .
Линейная относительная скорость тела
по отношению к неинерциальной (вращающейся)
системе отсчета ( считая ее при этом
неподвижной ) задаётся вектором
.
Линейная относительная скорость тела
по отношению к неинерциальной (вращающейся)
системе отсчета ( считая ее при этом
неподвижной ) задаётся вектором ![]() .
.
Тогда
ускорение ![]() в
инерциальной системе отсчета будет
равно сумме:
в
инерциальной системе отсчета будет
равно сумме:
![]() .
.
Ускорение Кориолиса. Правило Жуковского.
Кинематическая теорема Кориолиса: абсолютное ускорение точки является векторной суммой трех ускорений - относительного, переносного и ускорения Кориолиса.
Ускорение
Кориолиса равно
удвоенному векторному произведению
угловой скорости переносного движения
на относительную скорость точки: ![]() ,
следовательно по модулю ускорение
Кориолиса:
,
следовательно по модулю ускорение
Кориолиса: ![]() (sin90=1).
(sin90=1).
Кориолисово ускорение обращаетсяв нуль, когда: 1) переносное движение - поступательное, т.е. омега переносное равно нулю; 2) в те моменты времени, когда в относительном движении точка останавливается, например. при изменении направления относительного движения.
Правило Жуковского: Кориолисово ускорение можно получить, спроецировав вектор радиальной скорости на плоскость, перпендикулярную вектору омега переносное, увеличив полученную проекцию радиальной скорости в 2*(омега переносное) раз и повернув ее на 90 градусов в направлении переносного вращения.