Траектория, скорость и ускорение точки при векторном способе задания движения.
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
![]()
Кривая, которая вычерчивается концом какого-либо вектора, назыв. годографом этого вектора. Т.е. траектория – годограф радиус-вектора.
Пусть движение точки относительно тела отсчета задано ее радиус-вектором r(t). Тогда, по определению, скоростью точки будет векторная производная радиус-вектора r по скалярному аргументу - времени t:
|
![]()
По определению ускорение является производной по времени от вектора скорости:
|
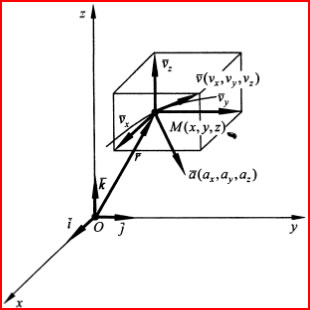
Траектория, скорость и ускорение точки при задании движения в декартовой системе координат.
Положение точки М в пространстве с использованием данной системы координат задается ее координатами x, y, z. Чтобы знать положение точки в пространстве в любой момент времени необходимо иметь уравнения движения точки в виде: x=x(t), y=y(t), z=z(t).
x=x(t), y=y(t), z=z(t) - представляют собой уравнения движения точки в декартовой системе координат и одновременно являются уравнениями траектории точки, записанными в параметрической форме, где параметром является время t. Чтобы найти уравнение траектории в форме непосредственной зависимости между координатами x, y, z, из системы уравнений x=x(t), y=y(t), z=z(t) необходимо исключить время. В таком случае траекторию будет определять, например, система уравнений вида: f1(x,y)=0, f2(x,z)=0. Следовательно, траектория представляет собой линию пересечения цилиндрических поверхностей, уравнения которых составляют систему f1(x,y)=0, f2(x,z)=0.
Скорость: ![]()
![]() .
Таким образом, скорость точки представляет
собой сумму составляющих векторов,
параллельных осям декартовой системы
координат:
.
Таким образом, скорость точки представляет
собой сумму составляющих векторов,
параллельных осям декартовой системы
координат: ![]() ,
где
,
где ![]() ,
а ее численное значение (модуль)
определяется по формуле:
,
а ее численное значение (модуль)
определяется по формуле: ![]() .
.
Ускорение: ![]() ,
проекции ускорения на оси декартовой
системы координат будут
,
проекции ускорения на оси декартовой
системы координат будут ![]() ,
составляющие ускорения, параллельные
осям координат, определятся как
,
составляющие ускорения, параллельные
осям координат, определятся как ![]() ,
а численное значение ускорения будет
равно:
,
а численное значение ускорения будет
равно: ![]() .
Проекцию ускорения на ось, совпадающую
по направлению с вектором скорости. для
определения характера движения точки
(т.е. ускоренно или замедленно она
движется) можно в данном случае найти,
в виде:
.
Проекцию ускорения на ось, совпадающую
по направлению с вектором скорости. для
определения характера движения точки
(т.е. ускоренно или замедленно она
движется) можно в данном случае найти,
в виде: 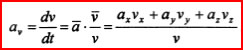 .
.
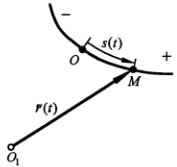
Скорость и ускорение точки при естественном способе задания движения.
Если траектория точки известна (т.е. в некоторой системе отсчета определена графически, с помощью уравнения или другим образом), то задать движение точки можно естественным способом. Для этого необходимо: зафиксировать на трактории точку начала отсчета, выбрать положительное и отрицательное направления отсчета дуговой координаты и указать уравнение движения точки по траектории в виде S=S(t).
Скалярный параметр S в данном случае имеет смысл криволинейной (дуговой) координаты, модуль которой определяет текущее расстояние по траектории от начала отсчета (точки О) до подвижной точки М, а знак показывает, по какую сторону от начала отч=счета находится точка М на траектории.
Следует отметить, что уравнение движения в форме S=S(t) определяет текущее положение точки именно на траектории, при этом может быть установлена взаимно однозначная связь между значениями координаты S и радиус-вектором точки М в той системе отсчета, в которой определена в рассматриваемом случае траектория движения точки. Тогда радиус-вектор точки может быть представлен в виде функциональной зависимости от параметра S в виде r=r(S).
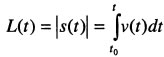
Модуль
скорости,
т.е. ее численное значение, при естественном
способе задания движения точки определятся
так: ![]() .
.
Ускорение составляет
сумму касательной и нормальной
составляющих: ![]() ,
где
,
где ![]() и
и  .
Следовательно:
.
Следовательно: ![]() .
.
Дополнение: Значение
пути -