

3.Частотный пуск сд
Для
него надо регулятор частоты. При пуске
плавно повышает частоту тока от 0 доfном.
Частота вращения поля статора также
плавно меняется от 0 до синхронизирующего
значения. На обмотку ротора сразу же
подано напряжения питания. Ротор плавно
разгоняется. Но при регулировании f
надо регулировать и Uc.
 .
.
Регулирование
частоты вращения ротора. .
.
Можно менять f1 и дp. Регулирование производят изменением частоты питающего тока f1. В чистом виде оно применяется для двигателей небольшой мощности. При больших моментах инерции двигатель будет выпадать из синхронизма, т.к. регулирование частоты надо делать очень плавно.
Применяется частотное регулирование с самосинхронизацией.
Управление
преобразователем частоты осуществляется
от датчиков положения ротора. Система
настраивается т.о. чтобы напряжение
было
 .
.
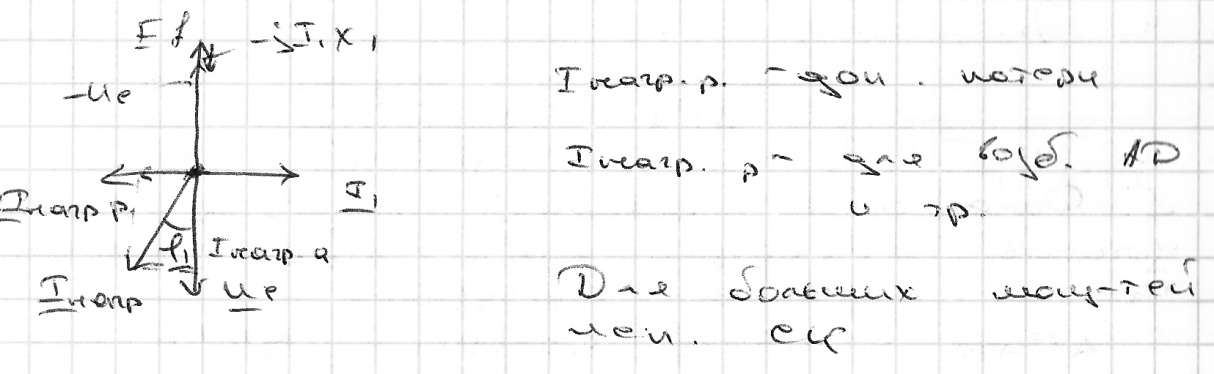
20. Синхронный компенсатор
СК представляет собой СД, который работает в режиме перевозбуждения.
Его предназначение- компенсирование Qв сетях. Нагрузка носит R-L характер .т.е ток отстаёт от U по фазе на какой-то угол. Ток возбуждения СК регулируется т.о. чтобы ток статора опережал Uc на угол близкий к 90 градусам. И чтобы этот ток был равен Iнагр.р.
Особенности конструкции СК:
1.Они не имеют выходного конца вала- вал выполняется менее массивным.
2.Уменьшаются воздушный зазор и размеры ОВ.
3.Выполняются обычно явнополюсными 2p=6-8.
4. Имеют более массивную магнитную систему.
CК-машины большой мощности.
21. Энергетика см
Часть мощности, которую потребляет СМ идет на компенсацию потерь самой машины Потери:
1)Потери на возбуждение
 ,
,
 - возбудителя(потери в цепи возбуждения)
- возбудителя(потери в цепи возбуждения)
Постоянные потери:
2)Механические потери (зависят от частоты вращения):

3)Магнитные потери (основная часть в серд. статора)
 ,
,
 - на вихревые токи
- на вихревые токи
 -
зависят от величины B,
от хар-к и толщины листов стали, а также
от частоты перемагничивания.
-
зависят от величины B,
от хар-к и толщины листов стали, а также
от частоты перемагничивания.
4)Электрические потери в обмотки статора:

5)Добавочные потери – потери э\м хар-ра, учитывающие пульсацию магнитного поля, поверхностный эффект и др.

Энергетическая диаграмма (генератор):
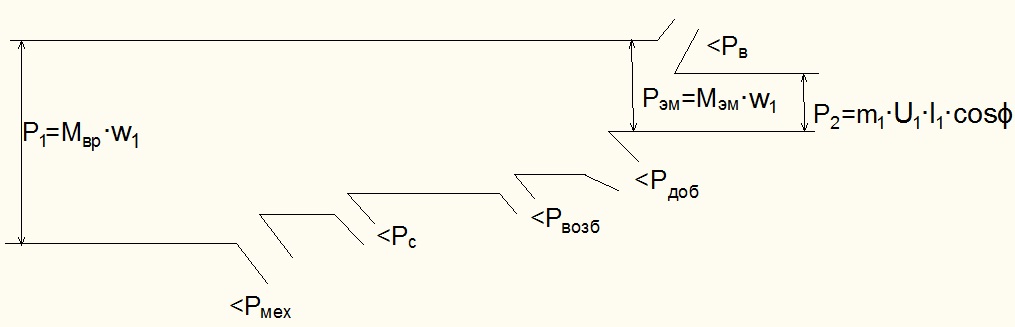
Двигатель:
Потребляемая
мощность
 поступает
из сети
поступает
из сети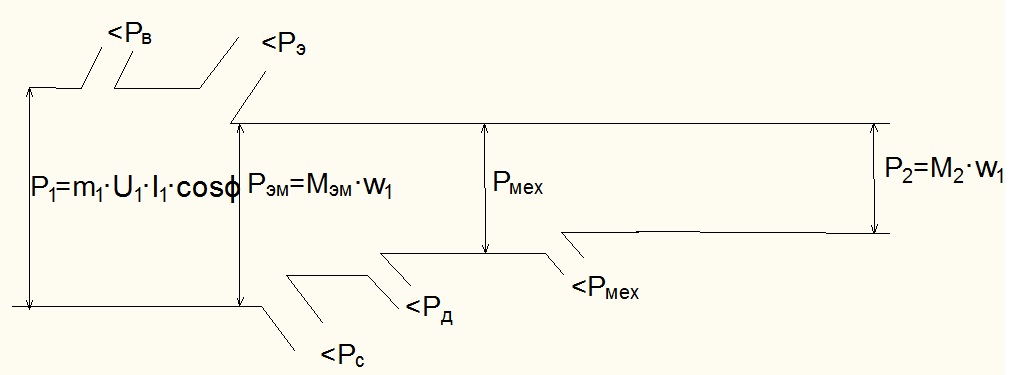
 при
самовозбуждении, когда О.В. питается
через выпрямитель от эл. сети.
при
самовозбуждении, когда О.В. питается
через выпрямитель от эл. сети.
Из энергетических диаграмм видно, что процессы преобразования энергии в эл м. более сложные, чем это описывалось формулами и при различных допущениях
2 2. Качание см
Рассмотрим
на примере неявнополюсной М. Пусть М
работает с некоторой нагрузкой, развивает
 ,
ему соответствует пограничный угол
,
ему соответствует пограничный угол
 Если
Если
 резко увеличить до
резко увеличить до
 ,
то
,
то
 .
Однако,
из-за инерции ротора при изменении
момента машины ускоряется и угол Q
проскакивает
.
Однако,
из-за инерции ротора при изменении
момента машины ускоряется и угол Q
проскакивает
 и достигает
и достигает
 ;
; ;
Затем
под действием синхронизирующего момента
ротор уменьшает свою скорость и угол
;
Затем
под действием синхронизирующего момента
ротор уменьшает свою скорость и угол
 :
: и так далее. В результате возникают
колебания частоты вращения ротора СМ
– качания СМ. Свободные качания возникают
при резких изменениях нагрузки
и так далее. В результате возникают
колебания частоты вращения ротора СМ
– качания СМ. Свободные качания возникают
при резких изменениях нагрузки

Период
св. колебаний:

I-момент
инерции вращающихся частей;
-
угловая скорость вращения ротора; -
удельная синхронная мощность; Р- число
пар полюсов
-
удельная синхронная мощность; Р- число
пар полюсов
При
качании с изменением угла Q
меняется мощность машины P
и момент М. О наличии качания СМ можно
судить по качанию стрелок амперметра
или вольтметра, включенных в цепи якоря.
Для уменьшения амплитуды качания и
ускорения их затухания исп-ся
короткозамкнутая демпферная обмотка
(ДО)(располагается на роторе в мощных
наконечниках) – успокоительная обмотка.
Действие ДО подобно действию механического
демпфера, потери в котором успокаивают
колебания механизма. При качениях в
демпферной обмотке с изменением частоты
вращения ротора индуцируется ЭДС. Под
действием этой ЭДС возникает ток, он
взаимодействует с резким магнитным
полем. Возникает асинхронный демпферный
момент:
 ;
D
– коэф. демпфирования; D=
;
D
– коэф. демпфирования; D= ;
;
 -
приведенное R
контура ДО.
-
приведенное R
контура ДО.
При отсутствии демпфирования процесс колебания происходит без существенных потерь энергии. Свободные колебания при этом могут быть незатухающими.
В некоторых случаях возможно даже увеличение амплитуды этих колебаний – самораскачивание машины (машина теряет свою устойчивость).Из-за самораскачивания во многих случаях невозможна работа с сетью малонагруженных генераторов малой мощности (до 20 кВт).
Колебания СМ могут быть вынужденными. Они появляются, если на вал М действует периодически изменяющийся внешний момент. Такое возможно в СГ, приводимых во вращение от поршневых двигателей, а также Д, которые служат для привода поршневых компрессоров. Для уменьшения вынужденных колебаний увеличивают инерцию ротора, устанавливая маховик.
23.Асинхронный ход и ресинхронизация СМ
Наличие
демпферной обмотки позволяет СМ работать
не только в синхронном режиме, но и в
асинхронном режиме при выхода из
синхронизма. Выпадение из синхронизма
может быть при снижении напряжения в
сети, при уменьшении возбуждения или
при резком возрастании внешнего момента(
 )
При выпадении из синхронизма, если М
работала генератором- скорость ротора
становится больше синхронной ,а если
двигателем – скорость ротора становится
меньше синхронной. По мере отклонения
частоты вращения ротора от частоты
вращения поля возникает скольжение и
асинхронный момент.
)
При выпадении из синхронизма, если М
работала генератором- скорость ротора
становится больше синхронной ,а если
двигателем – скорость ротора становится
меньше синхронной. По мере отклонения
частоты вращения ротора от частоты
вращения поля возникает скольжение и
асинхронный момент.
П ри
некотором скольжении асинхронный э/м
момент уравновешивает внешний момент
ри
некотором скольжении асинхронный э/м
момент уравновешивает внешний момент
 машина переходит в установившийся
асинхронный режим со скольжением
машина переходит в установившийся
асинхронный режим со скольжением

Асинхронный
режим не является нормальным. В таком
режиме СМ не генерирует Q
в сеть, а потребляет ее из сети. Поэтому
после устранения причин, приведших к
выпадению из синхронизма, должна быть
восстановлена синхронная работа. Процесс
перевода из асинхронного режима в
синхронный называется ресинхронизацией.
После перехода М в асинхронный режим,
когда первым делом снять возбуждение.
При этом исчезает знакопеременный
синхронный момент, который вызывает
колебания угловой скорости и токов в
обмотке якоря. После отключения токов
возбуждения устанавливается асинхронный
режим с некоторым скольжением S.
При этом сохраняется Р машины. Длительность
асинхронного режима зависит от потерь
в короткозамкнутых контурах ротора.
 =s
=s .
Длительность асинхронного режима должна
быть определена тепловым расчетом.
.
Длительность асинхронного режима должна
быть определена тепловым расчетом.
Процесс ресинхронизации аналогичен процессу самосинхронизации. Если скольжение в асинхронном режиме меньше, чем скольжение при котором возможно втягивание в синхронизм, то ресинхронизацию можно провести без предварительного уменьшения нагрузки М.

Если S больше, чем скольжение, при котором возможно втягивание в синхронизм – машину предварительно разгружают.