

2.1.6.Статический расчет механизма
Условие равновесия звена 5:
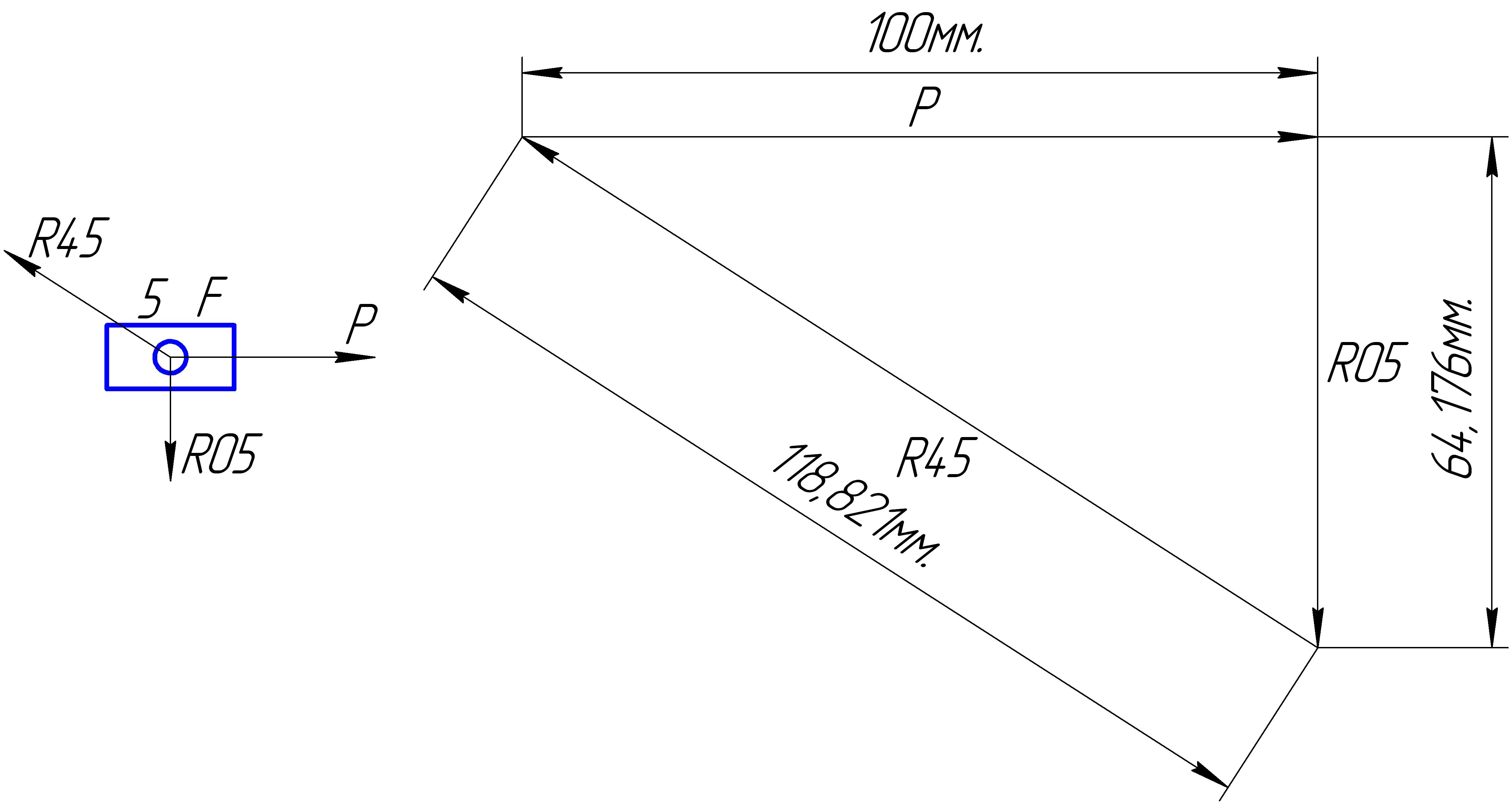
рис. 11. Условие равновесия 5 звена
Условие равновесия звена 4:
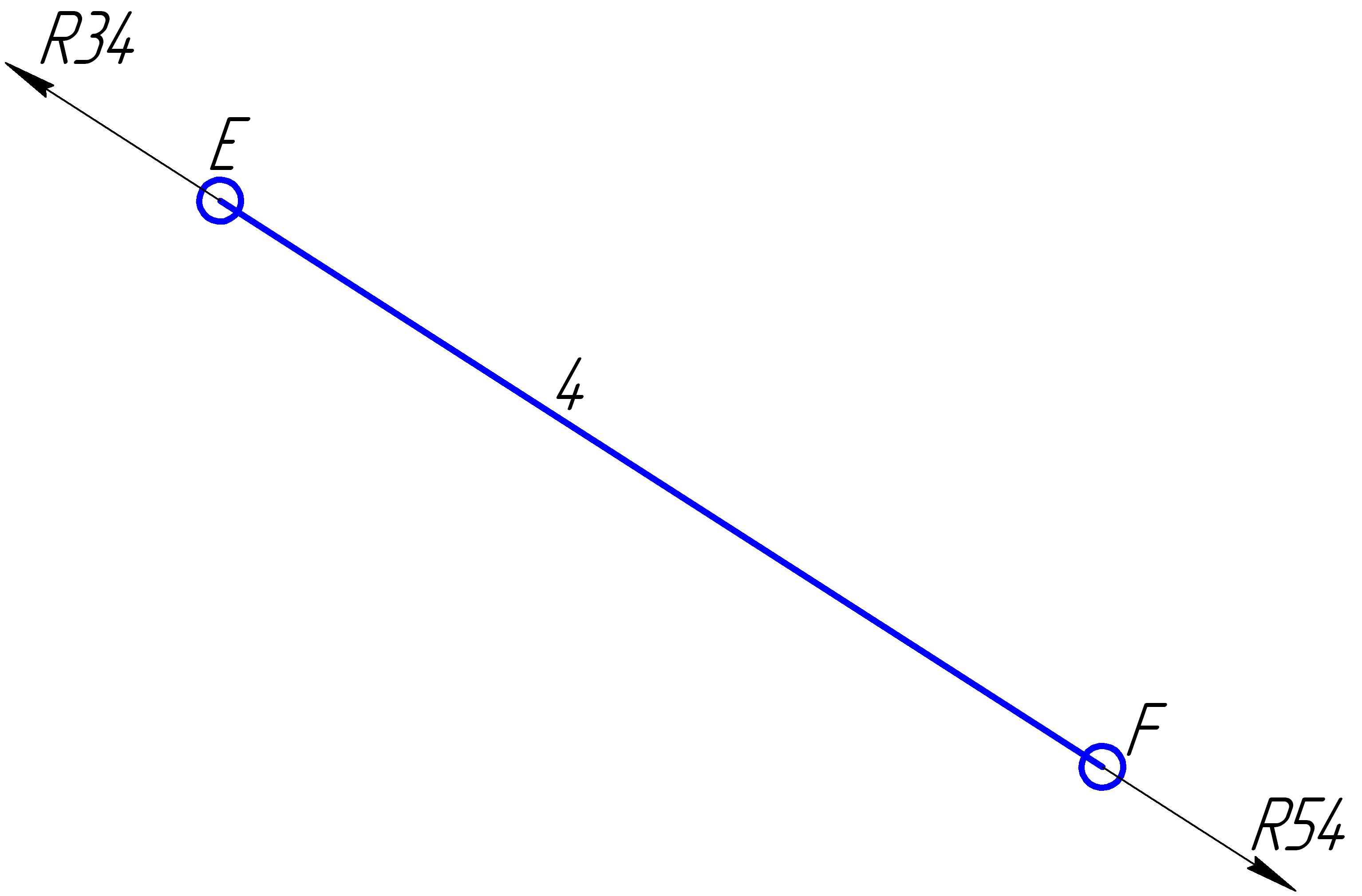
рис. 12. Условие равновесия 4 звена
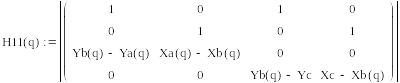
Условие равновесия звена 3:
рис. 13. Условие равновесия 3 звена

Условие равновесия звена 2:
рис. 14. Условие равновесия 2 звена
Условие равновесия звена 1:
рис. 15 Условие равновесия 1 звена
2.1.7.Кинетостатический расчет механизма
Задачей кинетостатического расчета механизма является определение реакций в кинематических парах и движущего момента Q с учетом сил инерции подвижных звеньев.
Массы
звеньев, совершающих вращательные
движения определим по зависимости:
![]() ,
где
,
где
![]() - длина звена,
- длина звена,![]() - погонная масса.
- погонная масса.
Тогда:
![]()
![]()
![]()
![]()
![]()
Осевые моменты инерции вращающихся звеньев определяем по формулам:
![]()
![]()
![]()
Силы тяжести звеньев определим по формуле:
![]()
![]()
![]()
![]()
![]()
![]()
Координаты центров масс звеньев:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Проекции сил инерции и моменты сил инерции:
Силы инерции:

Моменты инерции:
2.1.8.Составление и аналитическое решение уравнений кинетостатики
Группа ВВП:
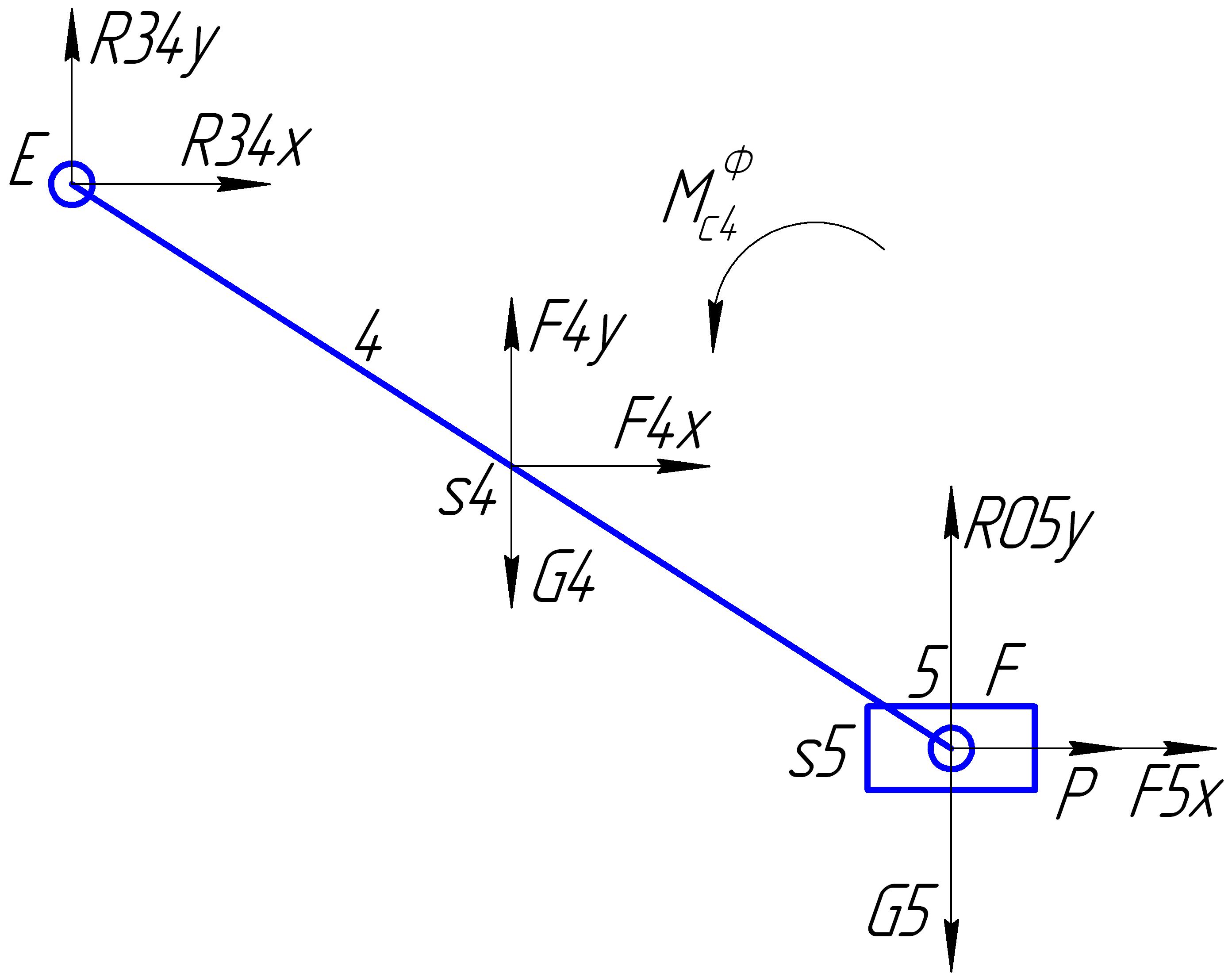
рис. 16. Группа ВВП

Реакции:
![]()
![]()
![]()
Звено 5:
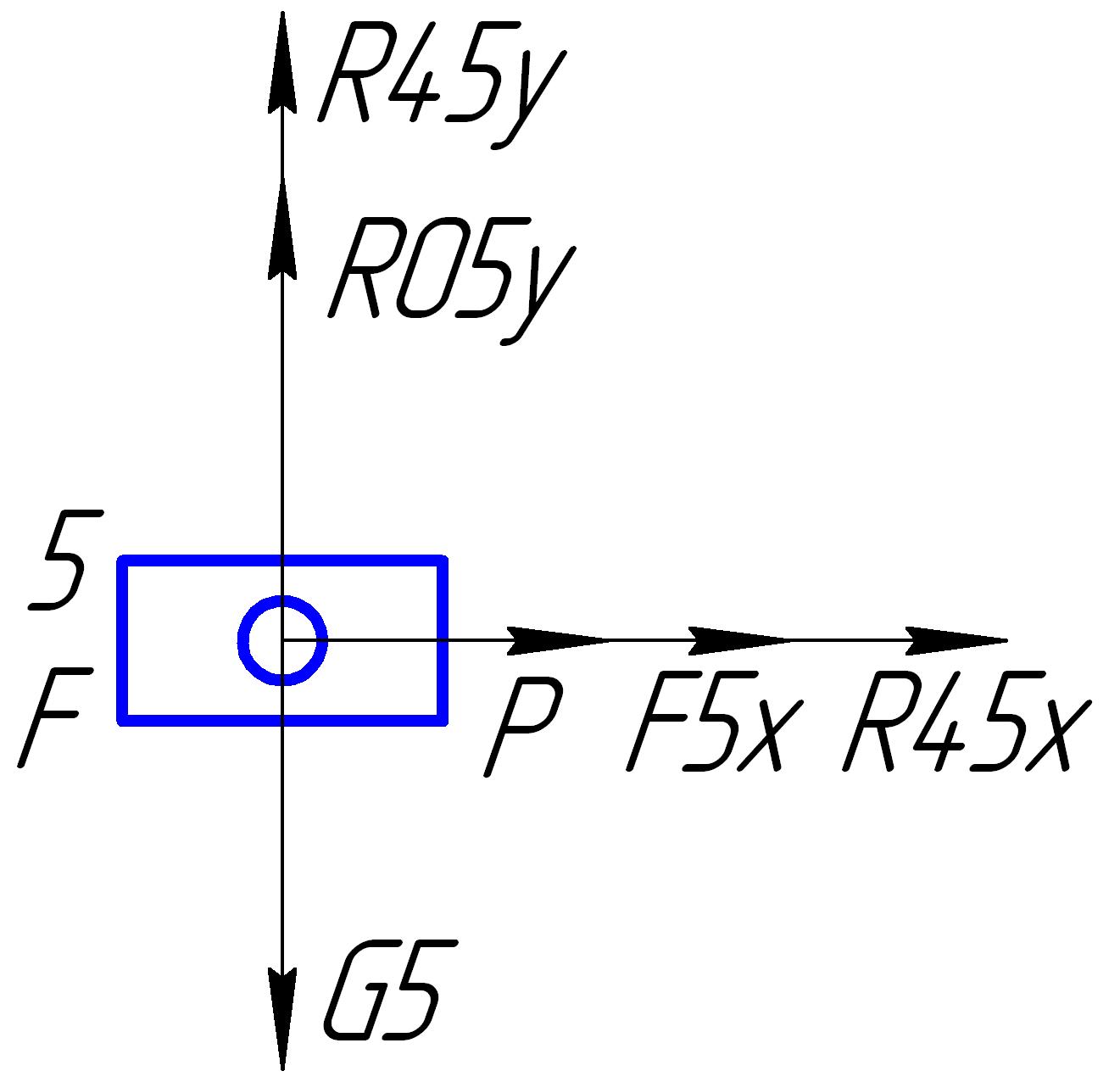
рис. 17. Звено 5
Реакции:
![]()
![]()
Группа ВВВ:
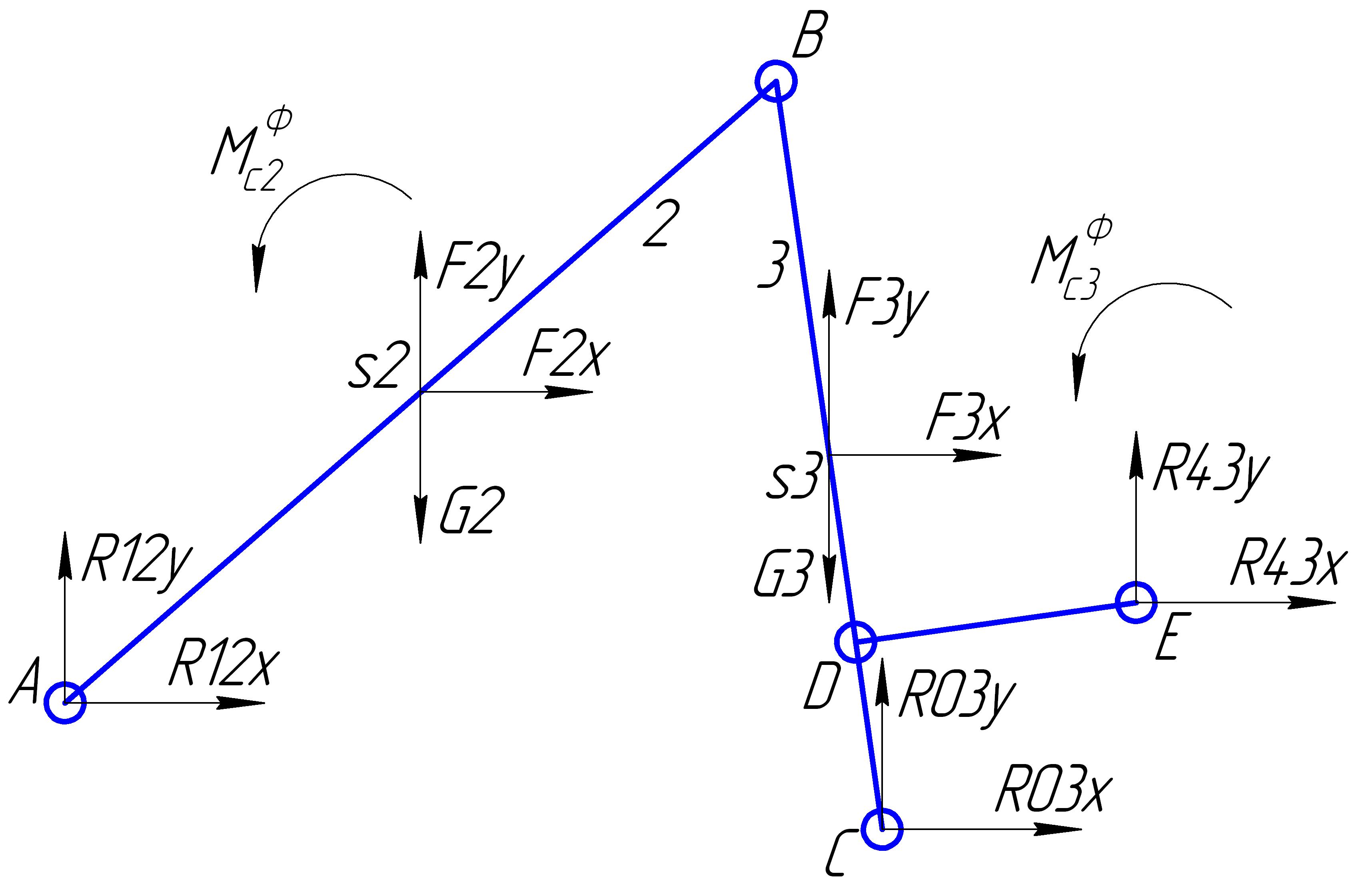
рис. 18. Группа ВВВ
Реакции:
![]()
![]()
![]()
![]()
Звено 2:
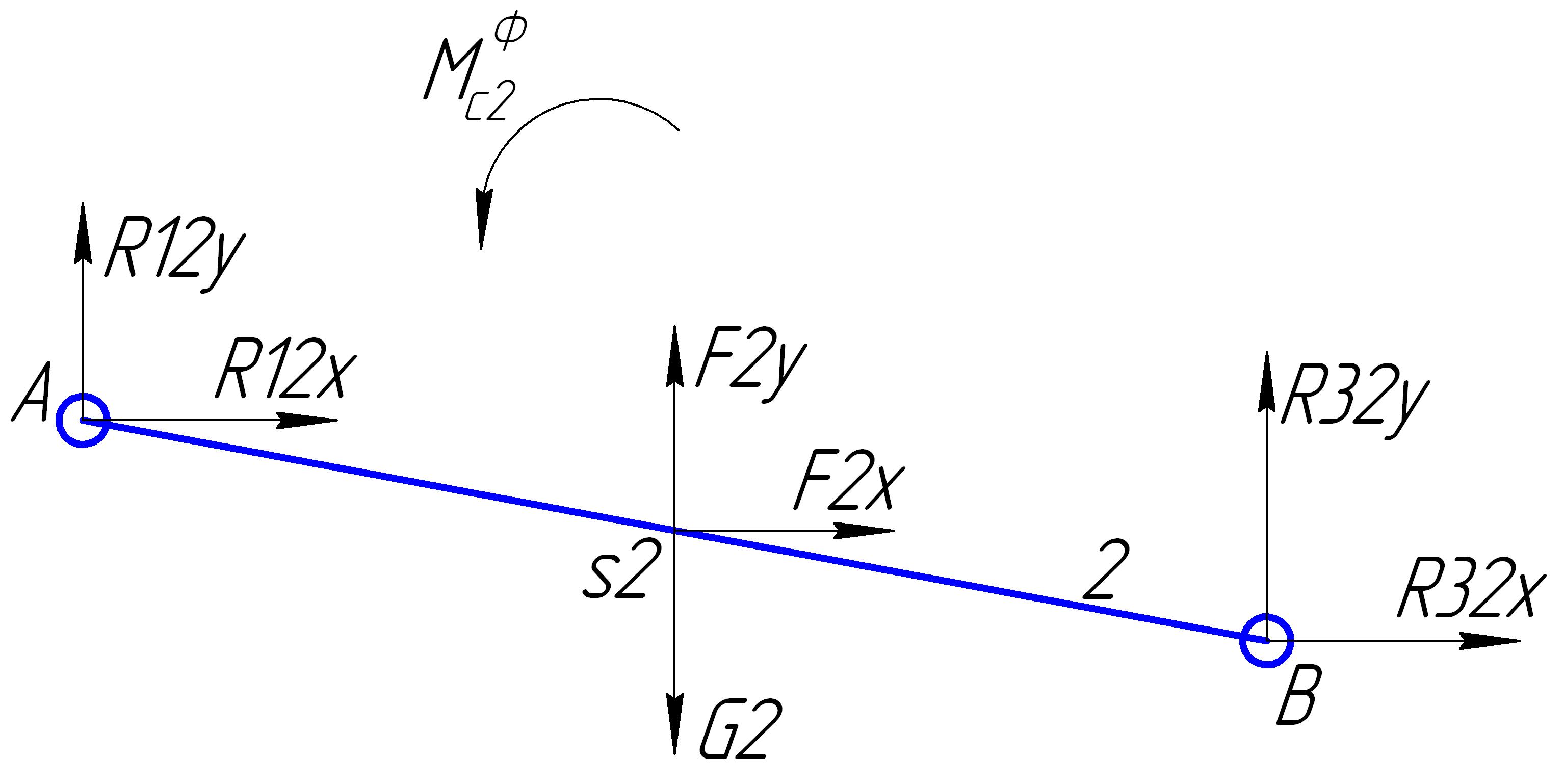
рис. 19. Звено 2

Реакции:
![]()
![]()
Кривошип:

рис. 20. Кривошип

Реакции:
![]()
![]()
![]()
С помощью общего уравнения динамики:

Определим движущий момент (проверка):
![]()
![]()
![]()
![]()
![]()
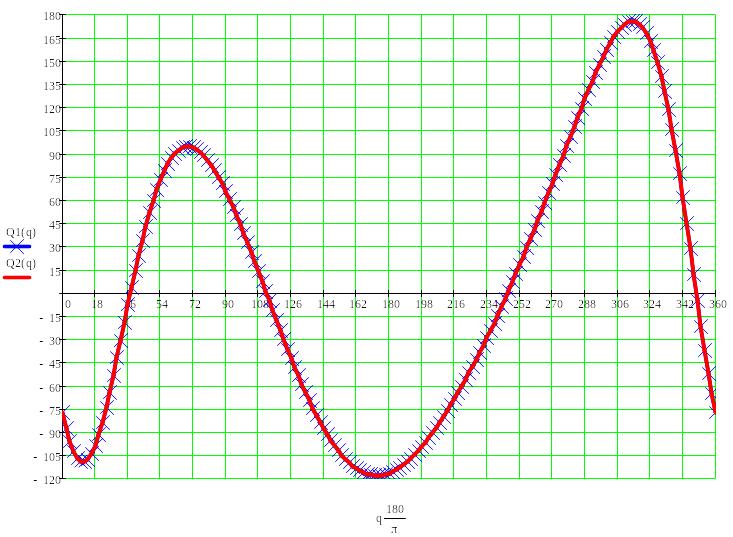
рис. 21. График движущего момента
2.1.9.План сил при q=60˚
3.Второй механизм
3.1.Часть 1
3.1.1.Исходные данные
Схема №6 (кулисный механизм)
Схема механизма (с учетом исходных данных)

рис. 22. Схема механизма
OA |
0,8 м |
XC |
0,05 м |
YC |
-0,24 м |
X3D |
0,05 м |
Y3D |
0,5 м |
DE |
0,2 м |
YE |
0,3 м |
M2 |
-1 м |
OM |
6 1/с |
3.1.2.12 положений механизма
План 12 положений механизма
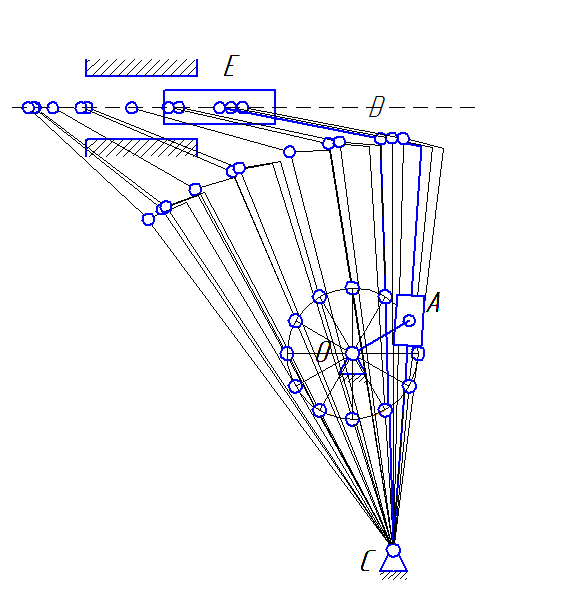
рис. 23. 12 положений
Структурный анализ
1) По формуле Чебышева определим степень подвижности механизма. Для данного механизма имеем: N = 5 (не включая стойку), Pн = 7, Pв = 0. Подставляя указанные числа в формулу Чебышева, имеем: Wn = 3˖5 - 2˖7 = 1, то есть данный механизм обладает одной степенью подвижности.
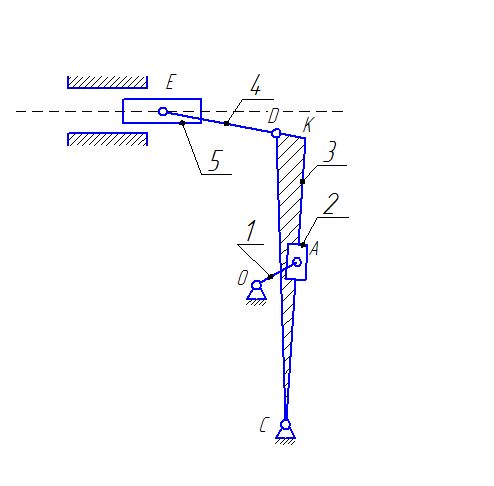
рис. 24. Изображение структурных групп
2) Разобьем механизм на структурные группы:
1-я структурная группа – звено 1 (кривошип); 2-я структурная группа (1-я группа Ассура) – звено 2 (камень) и звено 3 (треугольник (СК - кулиса)); 3-я структурная группа (2-я группа Ассура) – звено 4 (шатун) и звено 5 (ползун).
Построим структурную схему механизма (граф).
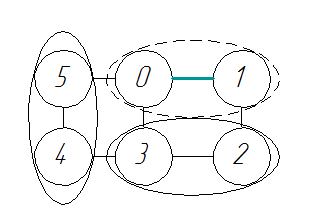

рис. 25. Структурные группы рис. 26. Граф
3.1.3.План положений скоростей и ускорений
План положения скоростей механизма при q = 30˚

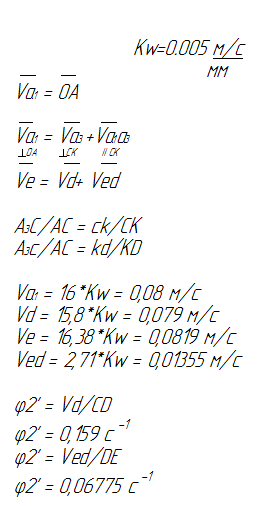
План положения ускорений механизма при q = 30˚
3.1.4.Таблица сравнений результатов
3.2.Часть 2 (силовой расчет)
3.2.1.Статический расчет механизма
3.2.2.Кинетостатический расчет механизма