

|
|
|
|||||||
|
|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ |
|||||||
|
|
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ |
|||||||
|
|
ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ |
|||||||
|
|
МЕХАНИКО-МАШИНОСТРОИТЕЛЬНЫЙ ФАКУЛЬТЕТ |
|||||||
|
|
КАФЕДРА ТЕОРИИ МЕХАНИЗМОВ И МАШИН |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
"К ЗАЩИТЕ" |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
(подпись преподавателя) |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
"___"_____________ |
2012 |
г. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА |
|
|
|||||
|
|
К КУРСОВОМУ ПРОЕКТУ |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТММ |
102301 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разработал: |
|
|
|
|
|
|
|
|
|
ст.гр. |
2044/1 |
|
|
|
(В.А.Лисицын) |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проверил: |
|
|
|
|
|
|
|
|
|
преподаватель |
|
|
(Г.П.Петров) |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Оценка: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Комиссия: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Санкт-Петербург |
|
|
|
|||
|
|
|
|
2012 |
|
|
|
|
|
Введение
1.1.Постановка задачи.
Структурный анализ;
Геометрический расчет (план 12-ти положений механизма в масштабе, решение групповых уравнений для 60-ти положений);
Кинематический анализ (построение планов скоростей и ускорений для двух положений, включая одно крайнее, аналитическое определение аналогов скоростей и ускорений для 60-ти положений);
Сравнение результатов кинематического анализа, полученных двумя разными способами (аналитическим и графоаналитическим);
Силовой расчет (составление и решение уравнений кинетостатики аналитическим методом для 60-ти положений и графоаналитическое решение кинетостатики (построение плана сил для 1 положения));
Сравнение результатов силового расчета полученных двумя методами.
2.Первый механизм
2.1.Часть 1
2.1.1.Исходные данные.
Схема №1 (кривошипно-ползунный механизм)
Схема механизма (с учетом исходных данных)
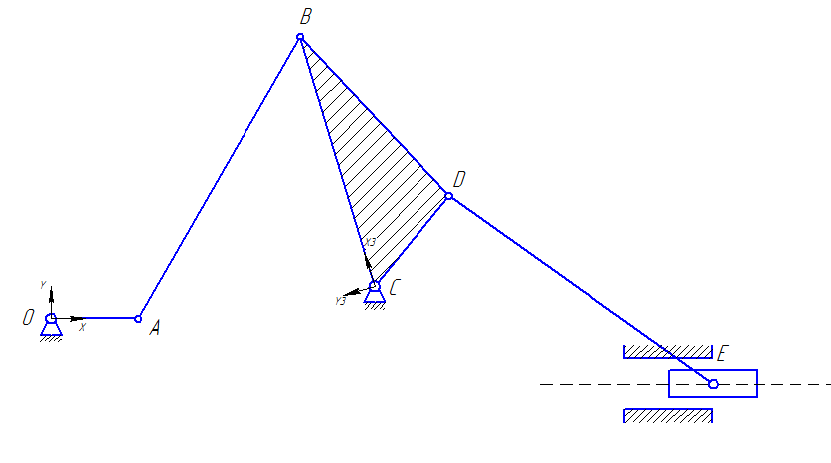
рис. 1. Схема механизма
-
OA
0,27 м
AB
1 м
BC
0,8 м
XC
1 м
YC
0,1 м
M1
-1
X3D
0,2 м
Y3D
-0,3 м
DE
1 м
YE
-0,2 м
M2
1
OM
5 1/c
2.1.2.12 Положений механизма
План 12 положений механизма
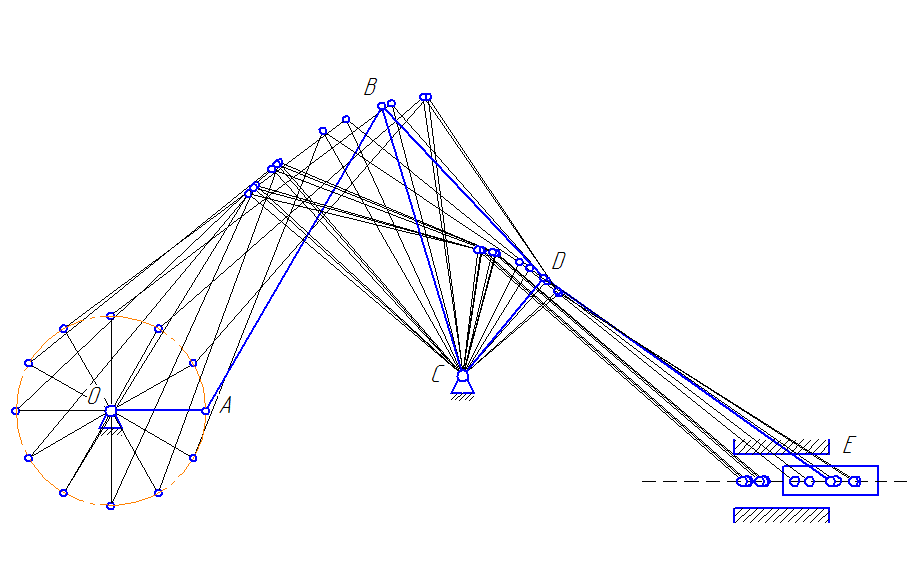
рис. 2. 12 положений
2.1.3.Структурный анализ
1) По формуле Чебышева определим степень подвижности механизма. Формула Чебышева: Wn = 3(N-1) - 2Pн - Pв, где Pн – число низших пар; Pв – число высших пар; N – число звеньев механизма. Для данного механизма имеем: N = 5 (не включая стойку), Pн = 7, Pв = 0. Подставляя указанные числа в формулу Чебышева, имеем: Wn = 3˖5 - 2˖7 = 1, то есть данный механизм обладает одной степенью подвижности.
2) Разобьем механизм на структурные группы:

рис. 3. Изображение структурных групп
1-я структурная группа – звено 1 (кривошип); 2-я структурная группа (1-я группа Ассура) – звено 2 (шатун) и звено 3 (треугольник); 3-я структурная группа (2-я группа Ассура) – звено 4 (шатун) и звено 5 (ползун).
Построим структурную схему механизма (граф).
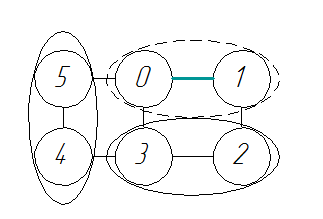

рис. 4. Структурные группы рис. 5 Структурные группы. Граф