3.2 Расчет электропривода поворота корпуса относительно ноги
Расчет
привода, обеспечивающего поворот корпуса
относительно ноги (ноги относительно
корпуса), проведем, исходя из требуемой
угловой скорости вращения
![]() .
Расчетная
схема показана на рисунке 00.
.
Расчетная
схема показана на рисунке 00.
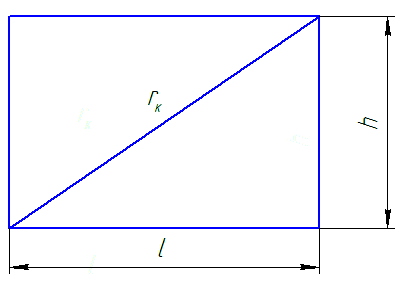
Рис. 10 Расчетная схема для выбора привода поворота корпуса относительно ноги
Уравнение момента инерции на валу будет иметь вид:
![]()
Рассчитаем значение радиуса инерции rК:
![]()
Запишем выражение для определения момента на валу двигателя и подставим численные значения, получим:
![]()
Из полученных данных найдем выходную мощность привода:
![]()
Рассчитаем необходимую мощность двигателя:
![]()
Исходя из рассчитанной мощности, выберем электродвигатель RE 25 фирмы Maxon с мощностью 10 Вт.

Рис. 11 Технические характеристики двигателя
Для
подбора редуктора к данному двигателю
необходимо перевести скорость двигателя
в рад/с:
![]() рад/с.
рад/с.
Рассчитаем передаточное отношение редуктора:
![]()
Из каталога был выбран редуктор планетарный редуктор GP 26 В диаметром 22 мм, который совместим с двигателем, что обеспечивает простую сборку привода.
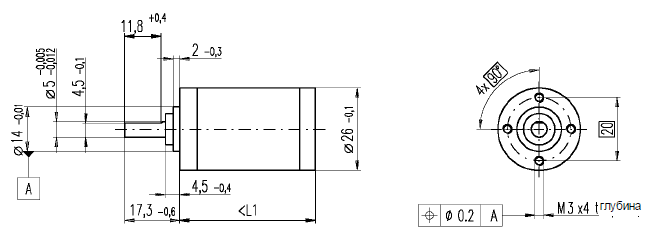
Рис. 12 Размеры редуктора
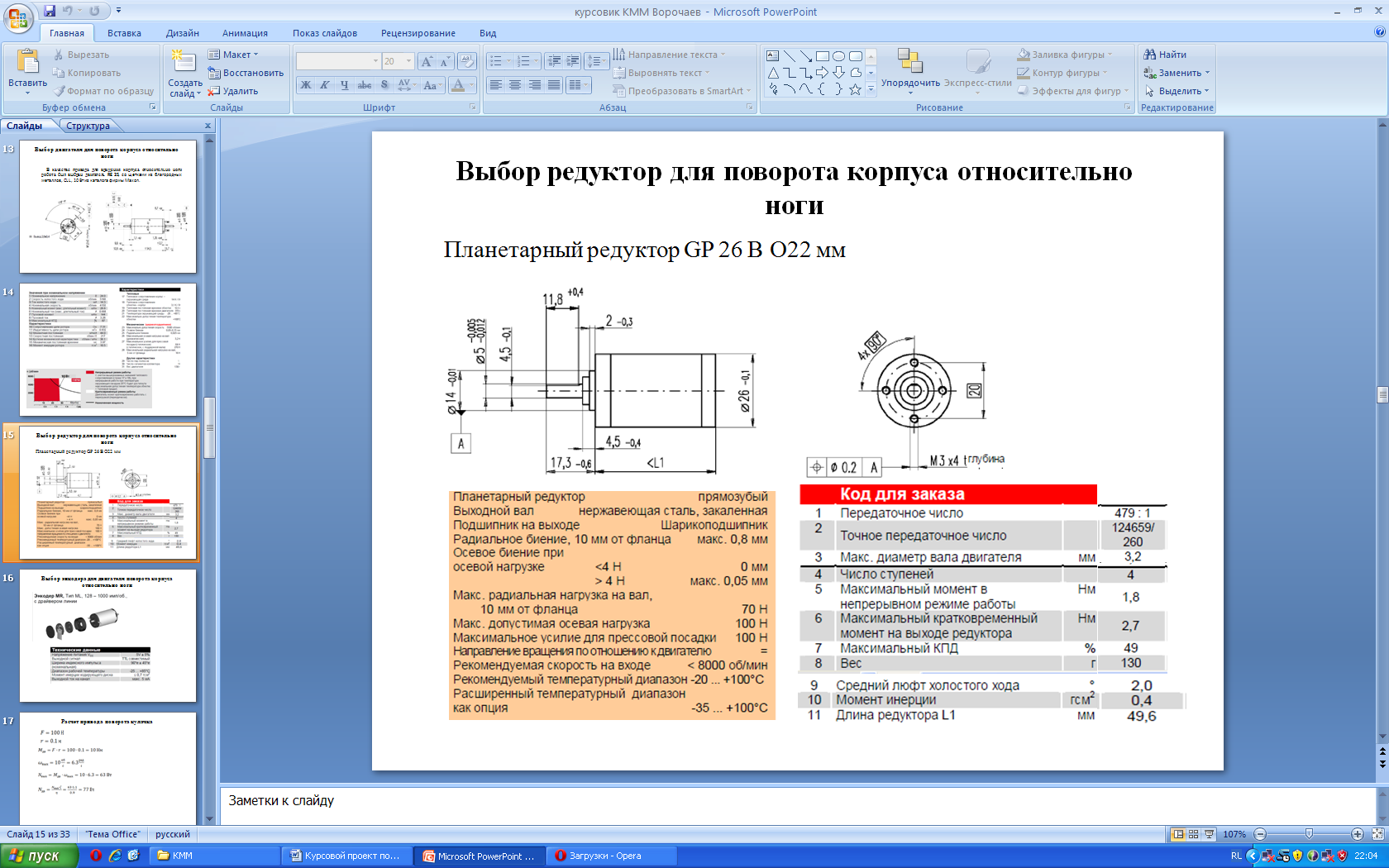
Рис. 13 Характеристики редуктора
Проверим выходной момент полученного привода:
![]()
Проверим угловую скорость на выходе:
![]()
Данные значения полностью удовлетворяют требуемым.
3.1.3 Расчет электропривода поворота кулачка
В
соответствии с результатами математического
моделирования, полученными в п. 2.5,
для реализации прыжка на высоту 0,9 м
необходима сила 500 Н. Примем, что кулачок
за счет угла подъема профиля дает выигрыш
в силе в 5 раз, поэтому будем рассчитывать
привод, создающий силу F=100
H.
Требуемая угловая скорость на выходе
привода составляет
![]() 1
об/с
1
об/с
Исходя из этого, запишем уравнение для момента на валу двигателя:
![]()
где r=0,1 м – максимальный радиус кулачка.
Из полученных данных найдем выходную мощность привода:
![]()
Рассчитаем необходимую мощность двигателя:
![]()
В соответствии с определенной мощностью выберем электродвигатель RE 35 90 Вт из каталога фирмы Maxon.
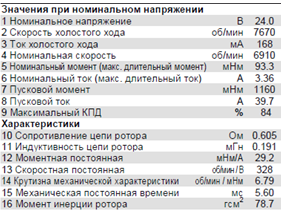
Рис. 15 Технические характеристики двигателя
Рассчитаем передаточное отношение редуктора:
![]()
Выберем планетарный редуктор GP 32 A, который совместим с двигателем, что обеспечивает простую сборку привода.
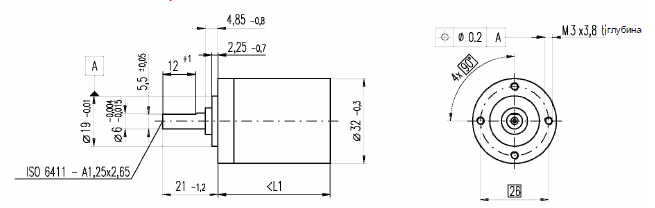
Рис. 16 Размеры редуктора
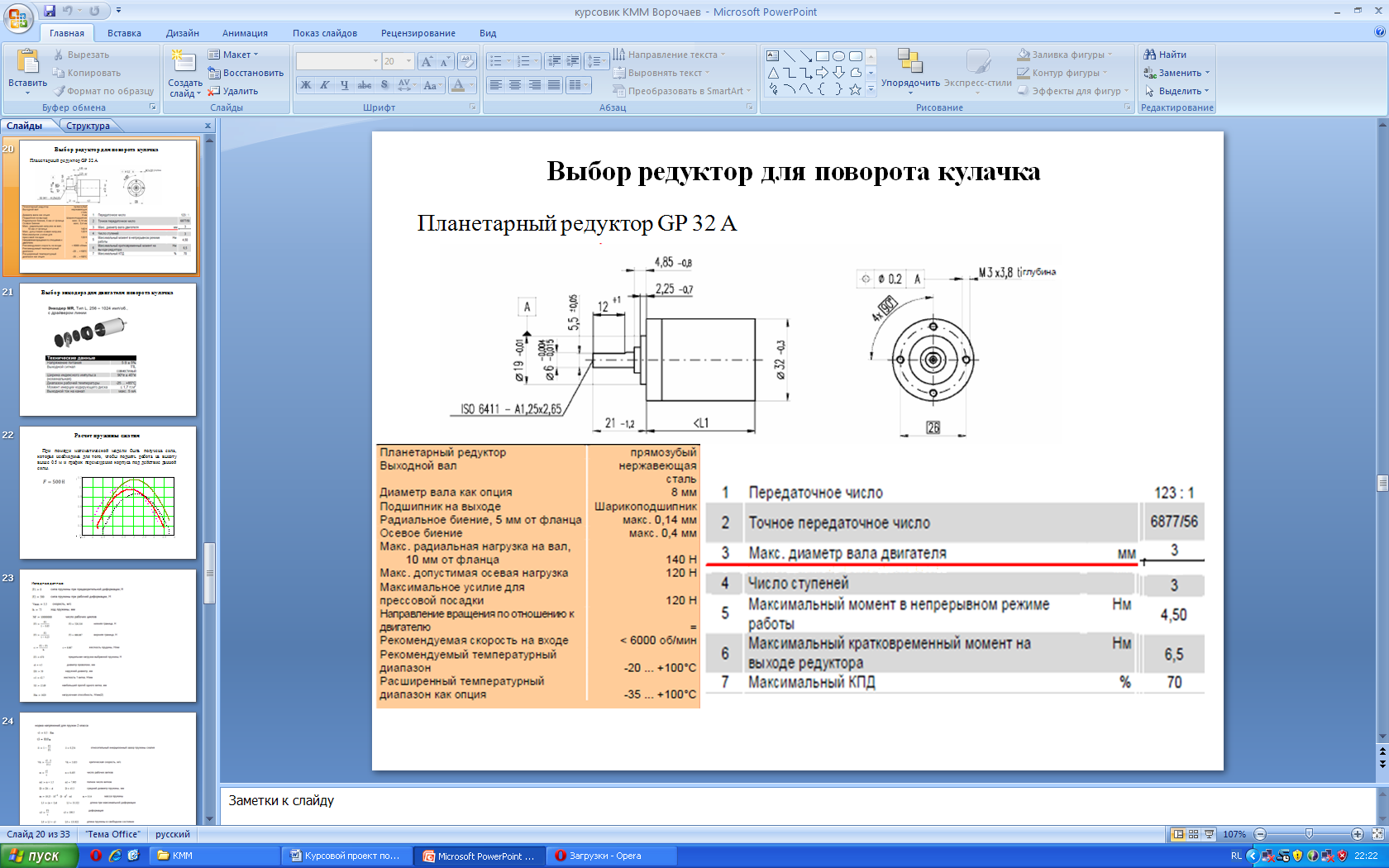
Рис. 17 Характеристики редуктора
Проверим выходной момент полученного привода:
![]()
Проверим угловую скорость на выходе:
![]()
Данные значения полностью удовлетворяют требуемым.
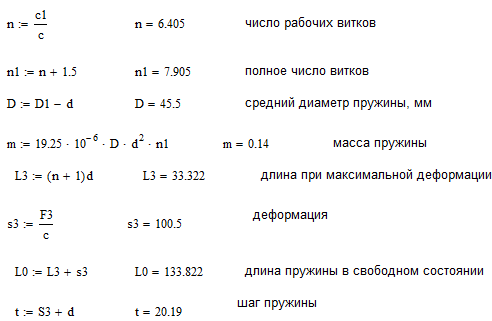
3.2 Расчет пружины
Проведем расчет пружины сжатия (рисунок 00), взводимой кулачком, исходя из следующих данных: предварительной
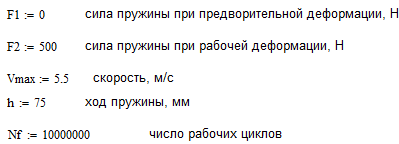
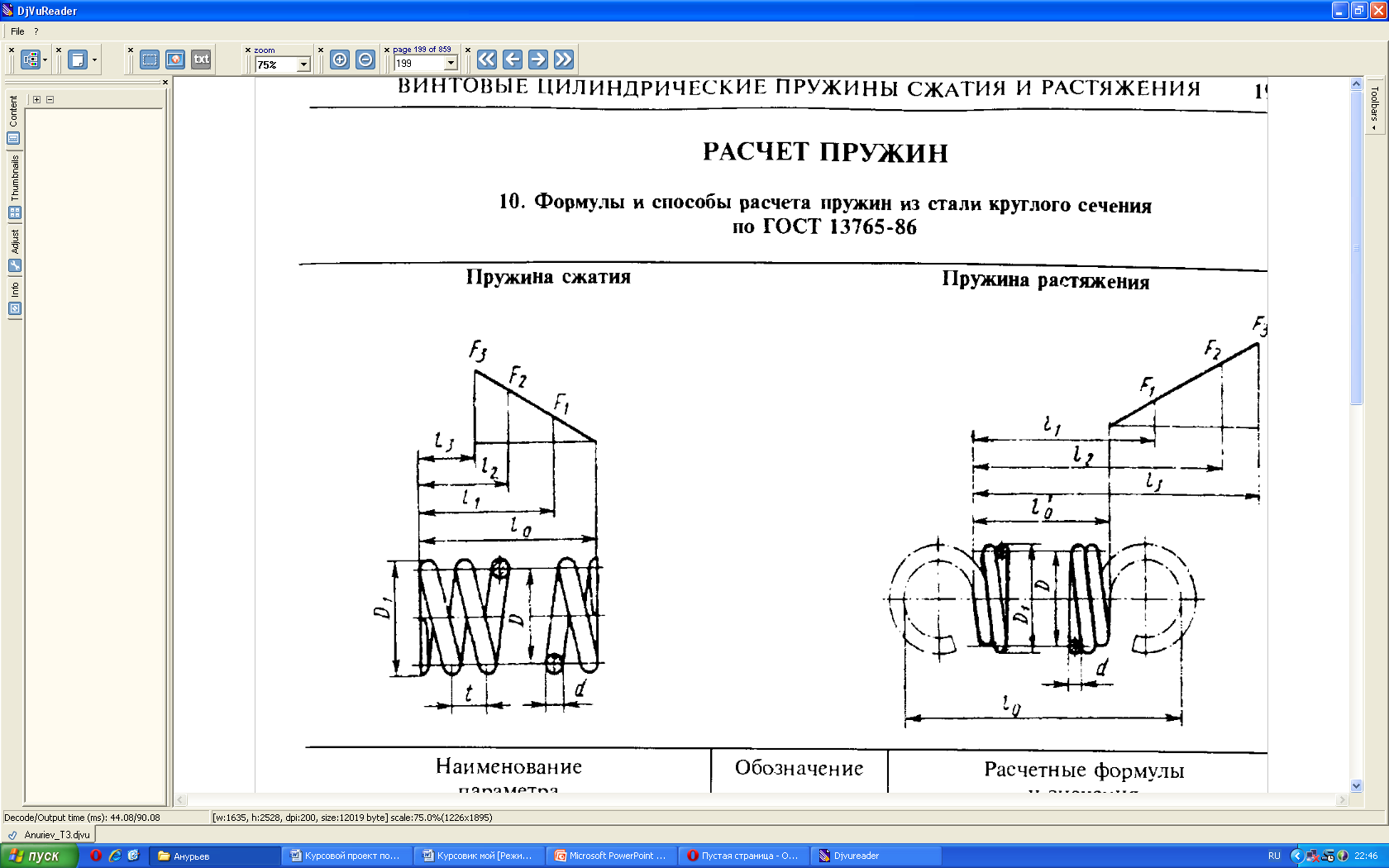
Рис. 21 Схема пружины сжатия
Рассчитаем границы значений предельной деформации для пружин 1 и 2 класса:
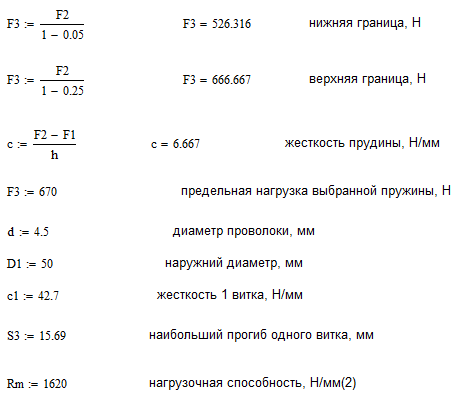
Найдем жесткость пружины:
Из таблицы стандартных пружин возьмем пружину со следующими параметрами:
С учетом ГОСТ 9389-75 рассчитываем максимальное касательное напряжение для пружины 2 класса:
![]()
![]()
Определим относительный инерционный зазор и критическую скорость:

Критическое значение скорости больше максимального следовательно данная пружина подходит.
Получим характеристики пружины: